ROS入门指南:安装与文件系统详解
需积分: 50 3 浏览量
更新于2024-07-18
收藏 1.09MB PDF 举报
本文档是一份详细的ROS(Robot Operating System)基础笔记,主要涵盖了ROS的安装步骤以及基本文件系统的介绍。ROS是一个开源的机器人操作系统,广泛应用于机器人开发中,提供了一种模块化、分布式的架构。
安装ROS:
该部分着重介绍了在Ubuntu Trusty(14.04.1)上安装ROS Indigo(一个LTS版本)的过程。首先,访问ROS官方安装网址(http://wiki.ros.org/kinetic/Installation),选择Ubuntu作为平台并进入安装指南。由于Indigo有丰富的支持和稳定性,因此被作为首选。安装过程中遇到了WiFi连接问题,解决方法是在终端中通过`echo "options asus_nb_wmi wpaf=4"|sudo tee /etc/modprobe.d/asus_nb_wmi.conf`命令重启无线模块。接着,按照教程逐步添加软件源、添加密钥、安装Debian软件包、初始化rosdep(一个用于自动安装依赖的工具)和环境设置,最后安装rosinstall包和其他依赖,如`turtlesim`。
ROS文件系统介绍:
1. 软件包与Manifest: 在ROS中,软件包是应用程序代码的基本单元,包括程序库、可执行文件、脚本和其他自定义组件。每个软件包都有一个`package.xml`文件,也称为Manifest,它是一个XML文件,用于描述软件包的元数据,如依赖关系、版本信息和描述等。在安装过程中,`ros-<distro>-ros-tutorials`软件包是必备的,用户需要根据实际安装的ROS版本(如Jade、Indigo、hydro等)来替换`<distro>`。
理解ROS计算图级与节点、话题:
ROS采用计算图模型,通过节点(Node)和话题(Topic)进行通信。节点是运行在不同计算机上的独立程序,它们通过发布消息到特定的话题来交换信息。主题是一种通信机制,类似于消息队列,节点间通过订阅topic来获取数据。ROS的核心在于它的通信模型,它使得机器人的各个组件能够高效地协同工作。
总结来说,这份笔记提供了关于ROS基础操作的实用指南,包括了如何在Ubuntu 14.04中安装ROS Indigo,以及ROS文件系统的关键组成部分。通过学习这些内容,初学者可以建立起对ROS系统结构的认识,并掌握必要的安装和配置技巧,以便进一步探索和开发基于ROS的机器人项目。
(其实,由于我们之前在创建功能包 / 时,在命令行中已经声明其依赖包为 ,故此步骤
可以省略。)
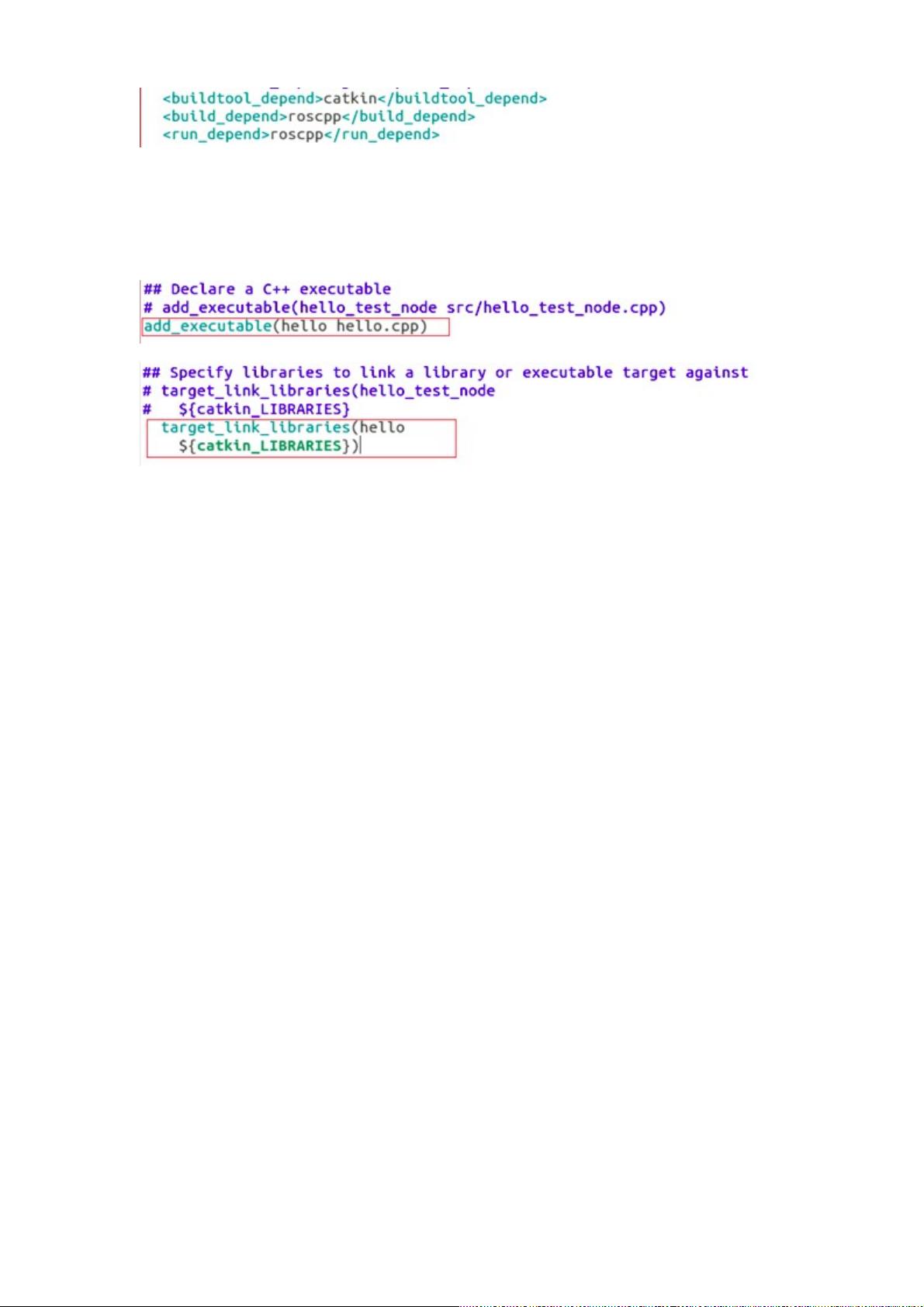
B(声明可执行文件。
接下来,我们需要在 1!=#中添加两行'来声明我们需要创建的可执行文件。
/#,"%
//,"7G/=H04 I%
第一句声明了我们想要的可执行文件的文件名 '以及生成此可执行文件所需的源文件列表
。如果有多个源文件'把它们列在此处' 并用空格将其区分开;第二句告诉 1$当链接此可
执行文件时需要链接哪些库" 在上面的 )/中定义%。如果你的包中包括多个可执行文件'为每
一个可执行文件复制和修改上述两行代码。
B8编译工作区。
这一步我们需要回到工作空间目录,使用 /$ 命令进行编译。运行如下命令:
:-
/$
/$ 这个命令它将会完成一些配置步骤,并且在你的工作区中创建 和 ,两个子目
录。这两个新目录用于存放和编译相关的文件'例如自动生成的编译脚本、目标代码和可执行文件。此外'
当完成功能包的相关工作后"译者注即完成了编写、调试、测试等一系列工作后'此时代码基本定型%'可以
放心地删除 和 , 两个子目录。
J运行 程序
程序是一个节点(), 需要一个节点管理器才可以正常运行。运行下面命令启动节点管
理器:
当我们创建一个 9 后,系统是不知道这个 9 存在的,一切与这个 9 相关
的 KK命令都会失效 这个 9 里面的 不会被 命令发现。要想将这个
9 的信息配置到环境里面,就必须执行这个 9 里面的 ,脚本。故为了让
能够找到我们创建的功能包和新生成的可执行文件,在启动完节点管理器后,还需要执行
9 中 子目录下名为 ,的脚本文件。在 目录下运行下面程序
:--
,
接着用 命令运行程序:
/
至此,完成了创建工作空间、功能包、编写、编译、运行简单的 程序。
L 命令
命令工具可以查看功能包的依赖关系。
根据依赖关系,将依赖包分为一级依赖包和间接依赖包,其中一级依赖包是指功能包直接依赖的依赖包,
间接依赖包是指依赖包的依赖包
现在我们用 查看 / 的一级依赖包:
/
(如果提示/,是因为没有 一下:---目录下的
, 文件)
在很多情况中,一个依赖包还会有它自己的依赖包,如
剩余17页未读,继续阅读
334 浏览量
506 浏览量
269 浏览量
139 浏览量
2025-01-16 上传
377 浏览量
2025-03-13 上传
2024-12-07 上传

mengfansheng16
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Linux与iOS自动化开发工具集:SSH免密登录与一键调试
- HTML5基础教程:深入学习与实践指南
- 通过命令行用sonic-pi-tool控制Sonic Pi音乐创作
- 官方发布droiddraw-r1b22,UI设计者的福音
- 探索Lib库的永恒春季:代码与功能的融合
- DTW距离在自适应AP聚类算法中的应用
- 掌握HTML5前端面试核心知识点
- 探索系统应用图标设计与ioc图标的重要性
- C#窗体技巧深度解析
- KDAB发布适用于Mac Touch Bar的Qt小部件
- IIS-v6.0安装文件压缩包介绍
- Android疫情数据整合系统开发教程与应用
- Simulink下的虚拟汽车行驶模型设计
- 自学考试教材《操作系统概论》概述
- 大型公司Java面试题整理
- Java 3D技术开发必备的jar包资源
