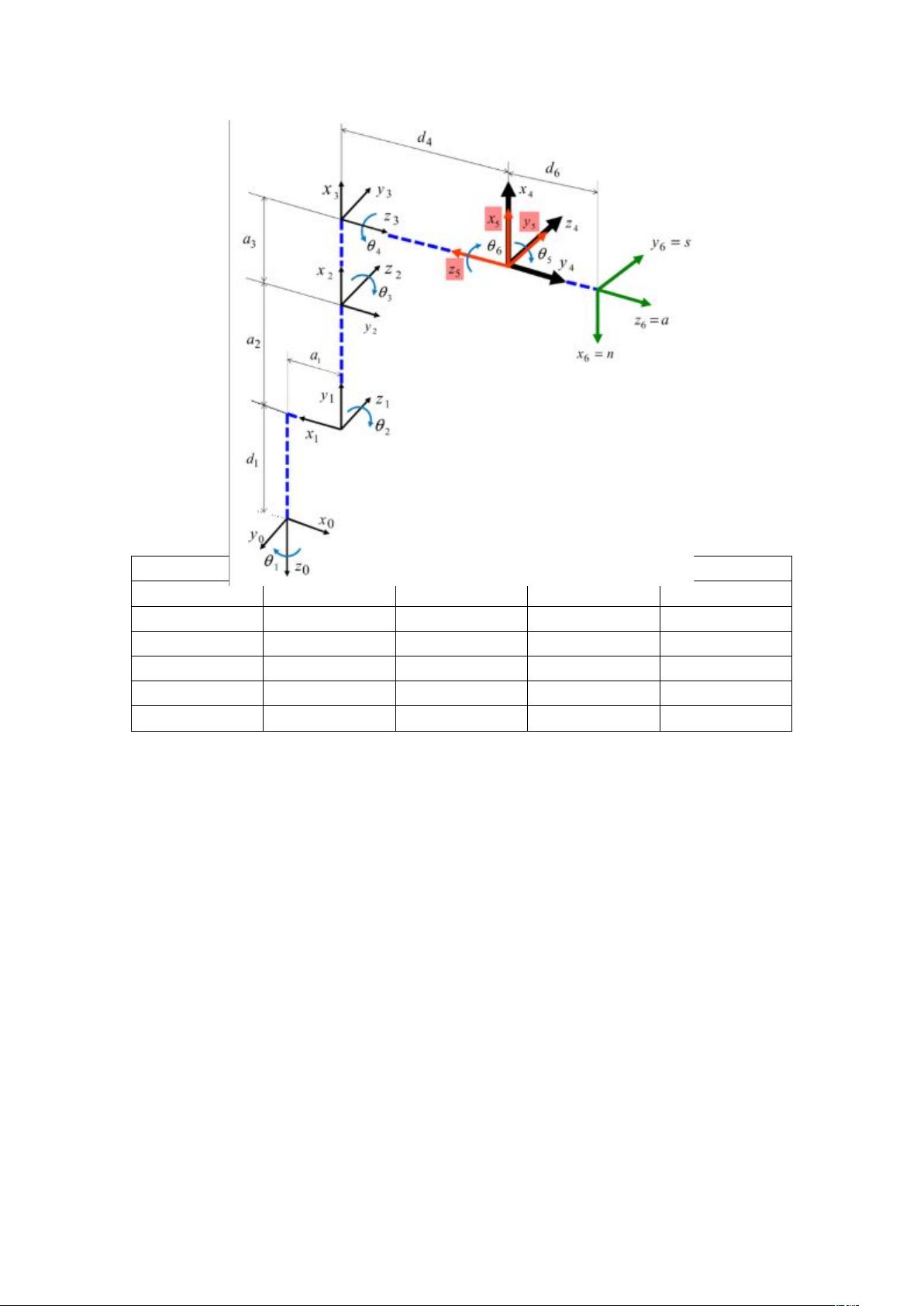
用于描述机器人的运动算法,α表示两个Z轴之间的夹角,值顺时针为正,逆时针为负; Θ表示绕Z轴转动的角度;d表示Zi沿着轴线方向滑移,得到Zi+1轴圆心重合;a表示两个Z轴之间的公垂线长度;
剩余10页未读,继续阅读