没有合适的资源?快使用搜索试试~
我知道了~
首页
Dy+VMware实现路由器端口映射的PAT配置实例.doc
Dy+VMware实现路由器端口映射的PAT配置实例.doc
4星
· 超过85%的资源
需积分: 10
8 下载量
23 浏览量
更新于2023-03-16
收藏
580KB
DOC
举报
立即下载
开通VIP(低至0.43/天)
送3个月
身份认证 购VIP最低享 7 折!
领优惠券(最高得80元)
Dy+VMware实现路由器端口映射的PAT配置实例.docDy+VMware实现路由器端口映射的PAT配置实例.doc
资源详情
资源推荐
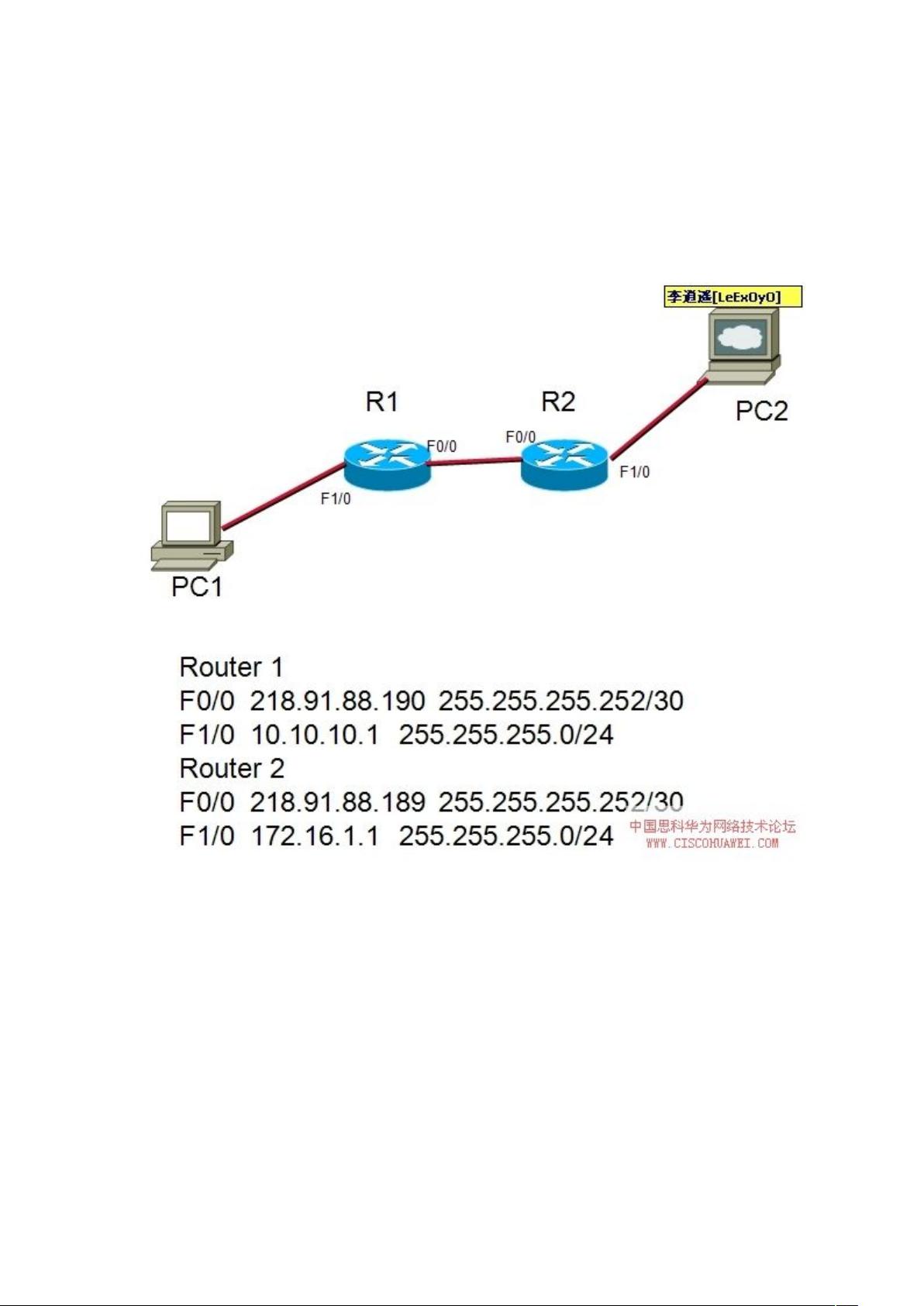
R1
为
A
区域,
R2
为
B
区域
A
区域
218.91.88.190
的
23
端口映射到
10.10.10.10
的
23
端口
B
区域
218.91.88.189
的
80
、
21
端口映射到
172.16.1.10
的
80
、
21
端口
TOP
图:
配置如下:
R1
:
interface FastEthernet0/0
ip address 218.91.88.190 255.255.255.252
ip nat outside
本内容试读结束,
登录后
可阅读更多
下载后可阅读完整内容,剩余3页未读,
立即下载
根据官方网站Tomcat-Mysql连接池配置实例.rar
根据Tomcat官方网站做的Tomcat-Mysql连接池配置实例。里面有用到的所有的包,还有context.xml,web.xml,test.jsp等。 mysql-connector-java-5.1.8-bin.jar 放到D:\Program Files\apache-tomcat-6.0.16\lib下,我用的...
DY08发电机测试数据报告.doc
DY08发电机测试数据报告.doc
通达信指标——DY月季花(主图).doc
通达信指标——DY月季花(主图).doc
帮我写一个matlab程序,求解2*Dy^2+Dy+y=e^x
好的,以下是 Matlab 代码: ```matlab % 定义 x 的范围和步长...title('求解 2*Dy^2+Dy+y=e^x'); grid on; ``` 运行这段代码可以得到如下图所示的结果: 
fp(i:i+N-1,j:j+N-1) = f2(i+dy:i+dy+N-1,j+dx:j+dx+N-1);
具体来说,fp的(i:i+N-1, j:j+N-1)区域将被f2的(i+dy:i+dy+N-1, j+dx:j+dx+N-1)区域的值进行替换。 在这段代码中,i和j是已定义的变量,表示矩阵的起始位置,dy和dx也是已定义的变量,表示在f2中所选区域的位移量。...
执行后txt文件中仍有小数点后的第三位为0的数据,修改程序if binary_matrix[i][j] == 1: value = i * avg_interval_dx + col1_min if value == round(value, 2): f.write("{:.2f}\t{:.2f}\t{}\n".format(value, j * avg_interval_dy + col2_min, binary_matrix[i][j])) else: f.write("{:.3f}\t{:.3f}\t{}\n".format(value, j * avg_interval_dy + col2_min, binary_matrix[i][j]))
f.write("{:.2f}\t{:.2f}\t{}\n".format(value, j * avg_interval_dy + col2_min, binary_matrix[i][j])) else: f.write("{:.3f}\t{:.3f}\t{}\n".format(value, j * avg_interval_dy + col2_min, binary_matrix[i...
为什么MATLABa2016中eq2='D2y+3*Dy+2*y=x'会报错
MATLABa2016中eq2='D2y+3*Dy+2*y=x'会报错是因为该语句缺少一个重要的指令,即符号变量的声明。在MATLAB中,符号变量需要使用syms命令进行声明。因此,正确的语句应该是: ```matlab syms y(x) eq2 = diff(y,x,2) +...
clear all; eq= 'D2y+3*Dy+2* y=0'; cond= 'y(0)= 1,Dy(0) =2'; yzi = dsolve(eq, cond); yzi=simplify(yzi);我的这段matlab的代码有啥问题
所以这里的微分方程应该写成 `eq= 'D2y+3*Dy+2*y=0';`。 2. `dsolve` 函数的第二个输入参数应该是一个字符串,表示方程的初始条件,但是这里的初始条件中应该使用 `==` 来表示等于,而不是 `=`。所以这里的初始条件...
修改程序f.write("{}\t{}\t{}\n".format(i * avg_interval_dx + col1_min, j * avg_interval_dy + col2_min, binary_matrix[i][j])),使最后计算出来的数值小数点显示三位,如果最后一位为0则显示两位
可以使用 Python 的格式化输出功能,结合条件语句来实现这个需求。修改后的代码如下所示: ```python f.write("{:.3f}\t{:.3f}\t".format(i * avg_interval_dx + col1_min, j * avg_interval_dy + col2_min)) if ...
编写程序,声明3个变量:(Demo2) double dx=3.5; double dy=2.8; int z; 编程实现计算z=dx+dy的结果并在屏幕上显示 dx=3.5, dy=2.8 dx+dy=6java
好的,下面是Java语言的实现: ```java public class Main { public static void main(String[] args) { double dx = 3.5; double dy = 2.8; int z = (int)(dx + dy); // 将 double 类型的结果强制转换为 int ...
MATLAB求解微分方程x^2*D2y+4*x*Dy+2*y=0,y(1)=2,Dy(1)=-3
其中,syms用于定义符号变量,Dy和D2y分别表示y的一阶和二阶导数,eqn为微分方程,cond1和cond2为初始条件,conds是一个包含初始条件的向量,ySol为求解得到的解析式。 最终的结果为: ``` ySol(x) = (4*x + 3*2^...
fp(i:i+N-1,j:j+N-1) = f2(i+dy:i+dy+N-1,j+dx:j+dx+N-1); % put the best matching block in the predicted image iblk = floor((i-1)/N)+1; % block index jblk = floor((j-1)/N)+1; % block index mvx(iblk,jblk) = dx; % record the estimated MV mvy(iblk,jblk) = dy; % record the estimated MV
1. `fp(i:i+N-1,j:j+N-1) = f2(i+dy:i+dy+N-1,j+dx:j+dx+N-1);` 将从 f2 中提取的最佳匹配块(大小为 N × N)放入预测图像 fp 的相应位置(起始点为 (i, j))。 2. `iblk = floor((i-1)/N)+1;` 计算当前块的索引 ...
修改程序 if binary_matrix[i][j] == 1: f.write("{}\t{}\t{}\n".format(i * avg_interval_dx + col1_min, j * avg_interval_dy + col2_min, binary_matrix[i][j])),,使txt文件中保存的数据保留小数点后三位,当小数点后的第三位为0则保留小数点后两位
f.write("{:.2f}\t{:.2f}\t{}\n".format(value, j * avg_interval_dy + col2_min, binary_matrix[i][j])) else: f.write("{:.3f}\t{:.3f}\t{}\n".format(value, j * avg_interval_dy + col2_min, binary_matrix[i...
修改程序使数据保存时以tab间隔,if binary_matrix[i][j] == 0 or binary_matrix[i][j] == 1: f.write("{} {} {}\n".format(i * avg_interval_dx + col1_min, j * avg_interval_dy + col2_min, binary_matrix[i][j]))
可以将代码中的空格替换为"\t"来实现以tab间隔保存数据,修改后的代码如下: ``` if binary_matrix[i][j] == 0 or binary_matrix[i][j] == 1: f.write("{}\t{}\t{}\n".format(i * avg_interval_dx + col1_min, j *...
修改程序with open('image_5.txt', 'w') as f: for i in range(matrix.shape[0]): for j in range(matrix.shape[1]): # 将 i 和 j 映射到新的坐标系中 i_new = i * avg_interval_dx + col1_min j_new = j * avg_interval_dy + col2_min # 将像素值乘以 37.463 并保存到 txt 文件中 if matrix[i, j] > 0 or matrix[i, j] < 0: f.write(f'{i_new}\t{j_new}\t{matrix[i, j] * 37.463 - 25.45:.5f}\n') else: f.write(f'{i_new}\t{j_new}\t{matrix[i, j] * 37.463 - 25.45:.5f}\n'),将i_new和j_new的值保留小数点后五位
# 将 i 和 j 映射到新的坐标系中 i_new = round(i * avg_interval_dx + col1_min, 5) j_new = round(j * avg_interval_dy + col2_min, 5) # 将像素值乘以 37.463 并保存到 txt 文件中 if matrix[i, j] > 0 or ...
syms da dalpha dd dtheta dbeta; da = 0; dalpha = 0; dd = 0; dtheta = 0; dbeta = 0; du = pi/180; L1(1) = Link('theta', 90*du+0.02+dtheta, 'a', 0+0.001+da, 'alpha', 0+0.003+dalpha, 'qlim', [180, 365], 'modified'); L1(2) = Link('d', 0+0.001+dd, 'a', 185+0.0079, 'alpha', 0+0.001, 'qlim', [3*du, 63*du], 'modified'); L1(3) = Link('d', 90+0.005+dd, 'a', 0+0.005+da, 'alpha', pi/2+0.005+dalpha, 'qlim', [60*du, 120*du], 'modified'); L1(4) = Link('theta', 0+dtheta, 'a', 120+0.12, 'alpha', pi/2, 'qlim', [230, 326], 'modified'); L1(3).theta = L1(3).theta + 0.023 + dtheta; L1(4).theta = L1(4).theta + 0.08 + dtheta; Needle = SerialLink(L1, 'name', 'Needle'); theta1 = 0.1; theta2 = 0.2; theta3 = 0.3; theta4 = 0.4; T01_error = DH(L1(1).theta+dtheta, L1(1).d+dd, L1(1).a+da, L1(1).alpha+dalpha); T12_error = DH(L1(2).theta+dtheta, L1(2).d+dd, L1(2).a+da, L1(2).alpha+dalpha); T23_error = DH(L1(3).theta+dtheta, L1(3).d+dd, L1(3).a+da, L1(3).alpha+dalpha); T34_error = DH(L1(4).theta+dtheta, L1(4).d+dd, L1(4).a+da, L1(4).alpha+dalpha); T_error = simplify(T01_error*T12_error*T23_error*T34_error); T = Needle.fkine([theta1, theta2, theta3, theta4]); T_error = subs(T_error, [theta1, theta2, theta3, theta4], [L1(1).theta, L1(2).theta, L1(3).theta, L1(4).theta]); T_total = T*T_error; dx = T_total(1, 4); dy = T_total(2, 4); dz = T_total(3, 4); rx = atan2(T_total(3, 2), T_total(3, 3)); ry = atan2(-T_total(3, 1), sqrt(T_total(3, 2)^2 + T_total(3, 3)^2)); rz = atan2(T_total(2, 1), T_total(1, 1)); disp(['dx = ', num2str(dx)]); disp(['dy = ', num2str(dy)]); disp(['dz = ', num2str(dz)]); disp(['rx = ', num2str(rx)]); disp(['ry = ', num2str(ry)]); disp(['rz = ', num2str(rz)]);这段代码运行不出来帮我修改
disp(['dy = ', num2str(dy)]); disp(['dz = ', num2str(dz)]); disp(['rx = ', num2str(rx)]); disp(['ry = ', num2str(ry)]); disp(['rz = ', num2str(rz)]); ``` 请注意,我更改了 qlim 的值,将其转换为...
修改程序gray = cv2.imread('skeleton_gaussian_high_1_binary.bmp', cv2.IMREAD_GRAYSCALE) matrix = np.array(gray) matrix = matrix / 255 # 将像素值乘以 37.463 并保存到 txt 文件中 with open('image_5.txt', 'w') as f: for i in range(matrix.shape[0]): for j in range(matrix.shape[1]): # 将 i 和 j 映射到新的坐标系中 i_new = i * avg_interval_dx + col1_min j_new = j * avg_interval_dy + col2_min # 将像素值乘以 37.463 并保存到 txt 文件中 if matrix[i, j] > 0 or matrix[i, j] < 0: f.write(f'{i_new}\t{j_new}\t{matrix[i, j] * 37.463 - 25.45:.4f}\n') else: f.write(f'{i_new}\t{j_new}\t{matrix[i, j] * 37.463 - 25.45:.4f}\n'),提取图像中像素点为白色的对应的像素值和对应的矩阵i、j坐标
j_new = coord[1] * avg_interval_dy + col2_min # 将像素值乘以 37.463 并保存到 txt 文件中 f.write(f'{i_new}\t{j_new}\t{white_pixels[i]:.4f}\n') ``` 这样修改后,可以提取图像中像素点为白色的对应的像素...
代码每句话多啥意思// if ( num_iter < 10000 ) // cout << "current=" << current->index.transpose() << endl; if (current->index(0) == endPtr->index(0) && current->index(1) == endPtr->index(1) && current->index(2) == endPtr->index(2))判断当前节点是否为终点。 { // ros::Time time_2 = ros::Time::now(); // printf("\033[34mA star iter:%d, time:%.3f\033[0m\n",num_iter, (time_2 - time_1).toSec()*1000); // if((time_2 - time_1).toSec() > 0.1) // ROS_WARN("Time consume in A star path finding is %f", (time_2 - time_1).toSec() ); gridPath_ = retrievePath(current); return true; } current->state = GridNode::CLOSEDSET; //move current node from open set to closed set. for (int dx = -1; dx <= 1; dx++) for (int dy = -1; dy <= 1; dy++) for (int dz = -1; dz <= 1; dz++) { if (dx == 0 && dy == 0 && dz == 0) continue; Vector3i neighborIdx; neighborIdx(0) = (current->index)(0) + dx; neighborIdx(1) = (current->index)(1) + dy; neighborIdx(2) = (current->index)(2) + dz; if (neighborIdx(0) < 1 || neighborIdx(0) >= POOL_SIZE_(0) - 1 || neighborIdx(1) < 1 || neighborIdx(1) >= POOL_SIZE_(1) - 1 || neighborIdx(2) < 1 || neighborIdx(2) >= POOL_SIZE_(2) - 1) { continue; } neighborPtr = GridNodeMap_[neighborIdx(0)][neighborIdx(1)][neighborIdx(2)]; neighborPtr->index = neighborIdx; bool flag_explored = neighborPtr->rounds == rounds_; if (flag_explored && neighborPtr->state == GridNode::CLOSEDSET) { continue; //in closed set. } neighborPtr->rounds = rounds_; if (checkOccupancy(Index2Coord(neighborPtr->index))) { continue; } double static_cost = sqrt(dx * dx + dy * dy + dz * dz); tentative_gScore = current->gScore + static_cost;
dy++) for (int dz = -1; dz ; dz++)`:这个语句用于遍历当前节点周围的所有相邻节点。 6. `if (dx == 0 && dy == 0 && dz == 0) continue;`:这个语句用于跳过当前节点本身。 7. `Vector3i neighborIdx; ...
package q5; class Point2D { int x; int y; public Point2D(int x, int y) { this.x = x; this.y = y; } public void offset(int a, int b) { this.x += a; this.y += b; } public double distance(Point2D p) { double dx = this.x - p.x; double dy = this.y - p.y; return Math.sqrt(dx*dx + dy*dy); } } class Point3D extends Point2D { int z; public Point3D(int x, int y, int z) { super(x, y); this.z = z; } public Point3D(Point2D p, int z) { super(p.x, p.y); this.z = z; } public void offset(int a, int b, int c) { super.offset(a, b); this.z += c; } public double distance(Point3D p) { double dx = this.x - p.x; double dy = this.y - p.y; double dz = this.z - p.z; return Math.sqrt(dx*dx + dy*dy + dz*dz); } } // test code public class Main { public static void main(String[] args) { Point2D p2d1 = new Point2D(0, 0); Point2D p2d2 = new Point2D(3, 4); double distance2D = p2d1.distance(p2d2); System.out.println("The distance between p2d1 and p2d2 is " + distance2D); Point3D p3d1 = new Point3D(0, 0, 0); Point3D p3d2 = new Point3D(p2d2, 5); double distance3D = p3d1.distance(p3d2); System.out.println("The distance between p3d1 and p3d2 is " + distance3D); } }请为以上代码添加注释
return Math.sqrt(dx * dx + dy * dy); } } // 定义一个三维坐标类,继承于二维坐标类 class Point3D extends Point2D { int z; // 坐标 z // 构造函数 public Point3D(int x, int y, int z) { super(x, y)...
请解释这段代码:for (i = 0; i < 4; i++) { int dx = x; int dy = y; int range = 1 + (Rank == 0 ? 0 : rand() % Rank);//该路段挖掘的宽度/长度 while (range > 0) { //计算出将要访问到的坐标 dx += direction[i][0]; dy += direction[i][1]; int count = 0, k; for (j = dx - 1; j < dx + 2; j++) { for (k = dy - 1; k < dy + 2; k++) { //abs(j - dx) + abs(k - dy) == 1 确保只判断九宫格的四个特定位置 if (abs(j - dx) + abs(k - dy) == 1 && maze[j][k] == ROUTE) { count++; } } }
其中,dx 和 dy 的初始值等于传入的变量 x 和 y,range 的初始值根据 Rank 的值来确定。 3. 在一个 while 循环内部,当 range 大于 0 时,执行以下操作: - 根据方向数组 direction,计算出将要访问的坐标 dx 和 ...
caozhiyu123
粉丝: 0
资源:
2
私信
上传资源 快速赚钱
我的内容管理
收起
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
会员权益专享
图片转文字
PDF转文字
PDF转Word
PDF加水印
全年可省5,000元
立即开通
最新资源
计算机基础知识试题与解答
计算机基础知识试题与解析
计算机基础知识试题与解析
计算机基础知识试题与解答
作业成本计算与云计算在石油企业中的应用探索
计算机基础知识试题与答案解析
计算机基础知识精选试题及答案详解
计算机基础知识试题与答案详解
计算机基础知识:历史、组成与应用
计算机基础知识试题与解答解析
计算机基础知识试题与答案解析
计算机基础知识测试与解析
三菱MELSEC iQ-R高速计数器模块安全操作与用户手册
计算机基础知识测验:从CPU到存储设备
信息技术基础知识:概念与革命
计算机发展历程:从早期到现代的演变
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功