

2 基于运动的运动去模糊
摘要 由于摄像机运动的运动模糊可以严重地降低一幅图像的质量。由于摄像
机运动的轨迹可以是任意的,运动图像去模糊是一个困难的问题。以前处理这
个问题的方法有:运动去模糊的盲复原、使用稳定透镜的光学校正和通过在运
动中限制曝光时间的特殊 CMOS 传感器。在本文中,我们利用空间分辨率和时
间分辨率之间的基本权衡构建一个混合的摄像头,可以在图像退化的过程中测
量自己的运动。所获取的运动信息被用于计算点扩散函数(PSF),在集成过
程中,表示相机的运动路径。然后该 PSF 用于该图像的去模糊。为了验证混合
成像的运动去模糊的可行性,我们已经实现了一个原型的混合型摄像机。这个
原型系统从使用长时间曝光和复杂的相机运动路径的不同的室内和室外场景方
面进行了评估。结果表明,对运动模糊问题,混合成像以最少的资源优于以前
的方法。我们通过简短的讨论得出在超出全球摄像机运动的情况下,我们的想
法是如何扩展到的单个以不同的速度运动的单个对象现场中去的。
1 简介
运动模糊是在图像集成的过程中照相机和场景之间相对运动引起的结果。
运动模糊可以被用于美学目的,例如强调一个场景的动态性。也可以用来获得
运动和场景的 3D 结构信息。运动模糊还被用来计算图表来创造更多真实感的
图像来取悦眼睛。在人类和机器视觉上的一些运动模糊的代表和模型已经被提
出。
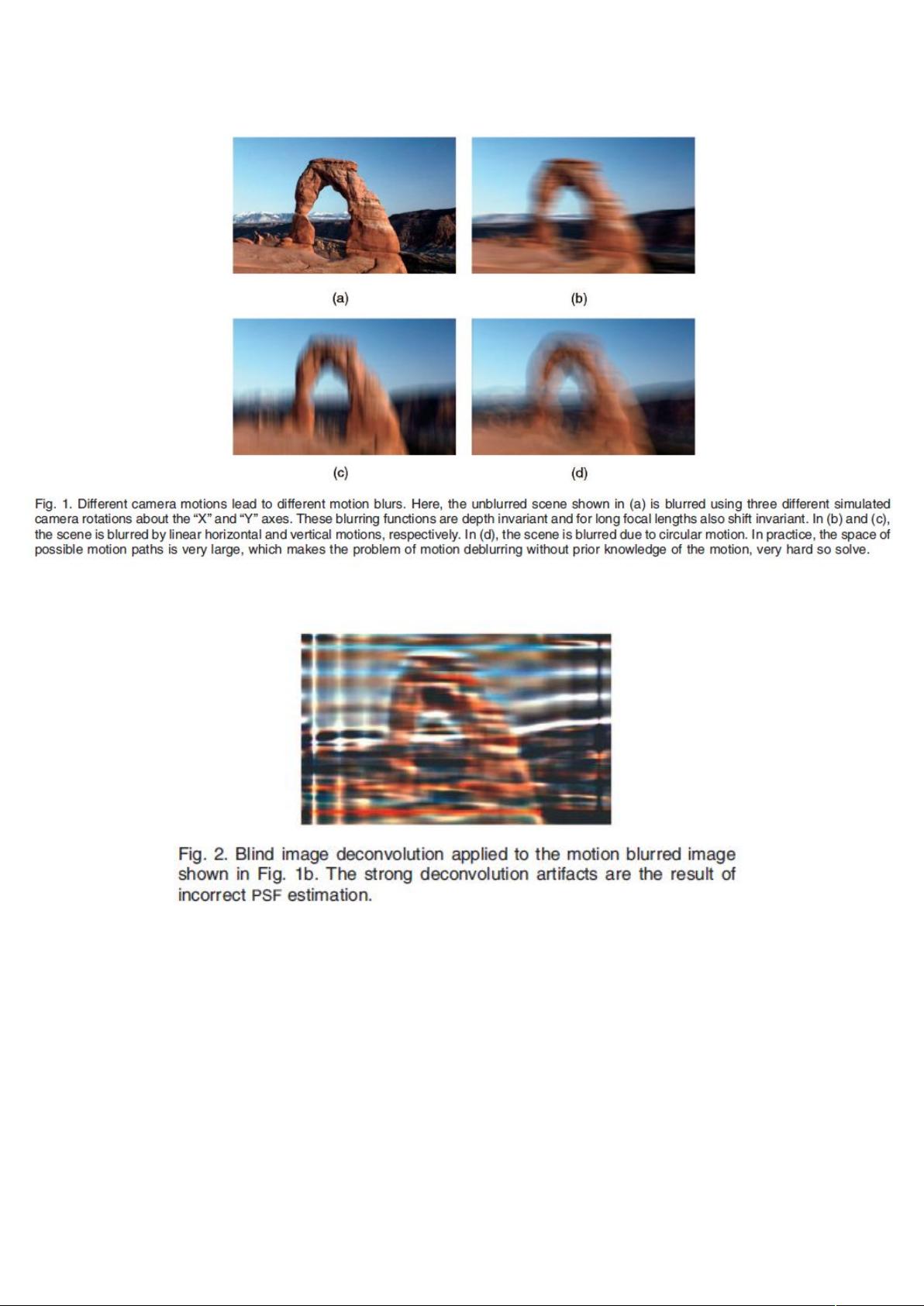
经常地,运动模糊被简单地描述为不良影响。其已经在早期就困扰了摄影
术而且仍然被认为是可以显著降低图像质量的影响。Fig.1 给出了由于照相机简
单的运动引起的模糊图像的模拟例子。在实际上,由于可能运动路径的巨大空
间,每一个运动模糊图像都趋于独特模糊。这导致运动去模糊更加艰难。
运动模糊图像在模糊至少为局部移不变的和引起模糊的模糊函数是已知的
情况下可以通过图像去卷积重建(直至失去空间频域),因为PSF同时是非
已知的,相当大数量的研究投入于从图像本身估计PSF。这通常使用图像盲
去卷积估计 PSF。PSF 估计和运动去模糊已经被定位在图像序列处理和空间超
分辨率算法和时间超分辨率算法中。
图像盲去卷积算法一般假设引起模糊的运动可以被一个明确的简单的运动
模糊模型参数化。实际上,因为照相机运动路径更加复杂,上述方法到真实世
界
摄影上的适用性是非常局限的,Fig.2 给出了对 Fig1.b 上的图像使用 matlab 上的图像盲去卷
积方法的结果。结果图像清晰地被强烈的去卷积条纹降质。
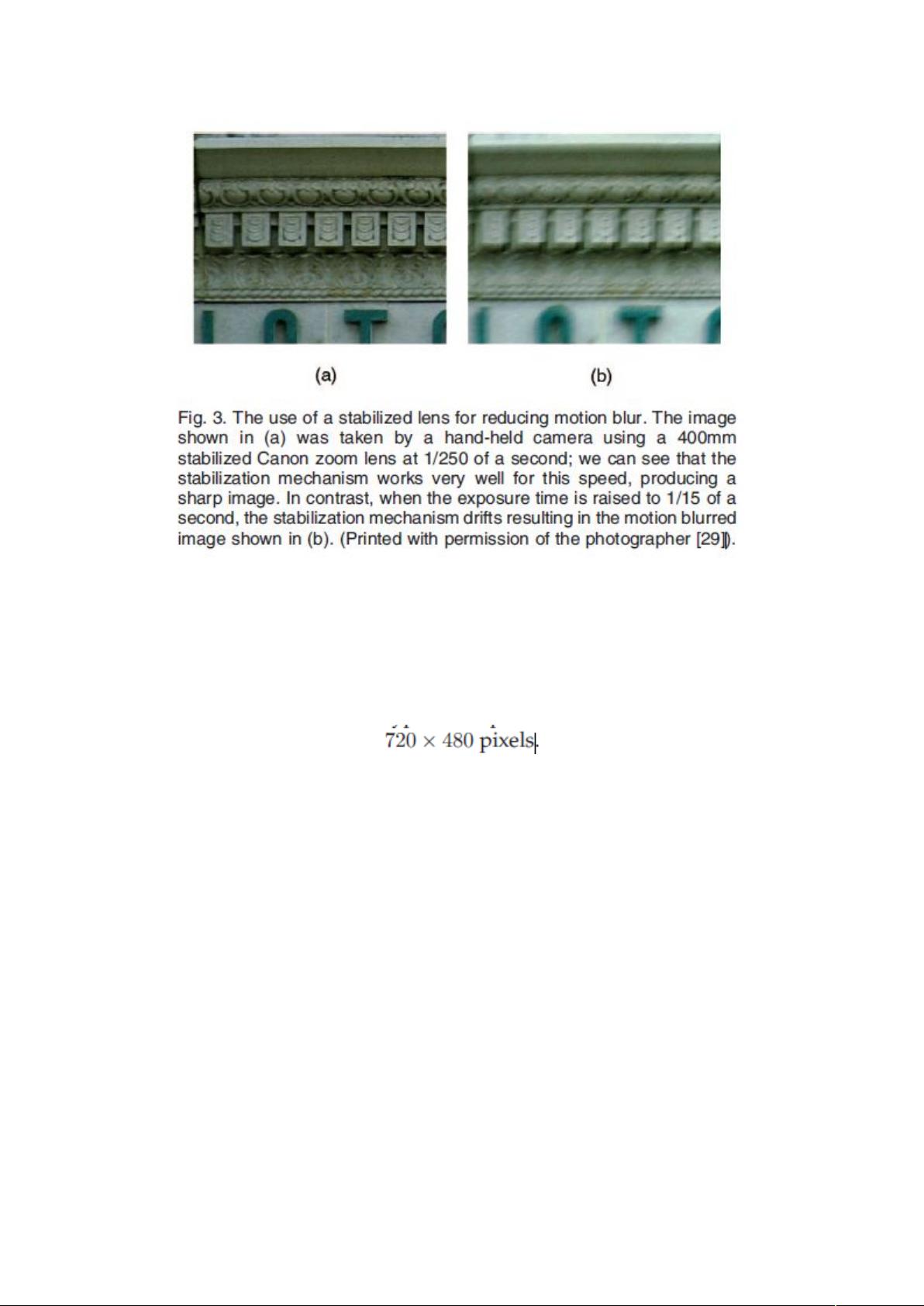
最近提出了比上面的方法更加一般的对运动模糊问题的两个硬件方法。第一个方法为
弥补照相机晃动使用了光学的平稳透镜组。这些透镜有一个由惯性传感器控制的可调节的
光学元素,弥补了照相机运动。如 Fig.3 所示,这个方法只对相当小的曝光有效;那些甚至
在 1/15 秒期间降质的图像可以由于系统漂移展现显著的运动模糊。第二个方法是由特殊设
计的 CMOS 传感器,这些传感器通过在检测到模糊的区域里选择性的停止图像合成来阻止
运动模糊。然而,在长曝光时间内不能解决由于照相机晃动引起的运动模糊问题。
在本论文中,我们呈现了一个对图像运动去模糊的新奇的方法。我们的方法从在图像
合成时间内由限制能量得到而稀疏的真实运动测量来估计引起模糊的连续PSF。这个P
SF用来去卷积去图像模糊。
剩余13页未读,继续阅读

bilianwangpei
- 粉丝: 0
- 资源: 2
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- BSC关键绩效财务与客户指标详解
- 绘制企业战略地图:从财务到客户价值的六步法
- BSC关键绩效指标详解:财务与运营效率评估
- 手持移动数据终端:常见问题与WIFI设置指南
- 平衡计分卡(BSC):绩效管理与战略实施工具
- ESP8266智能家居控制系统设计与实现
- ESP8266在智能家居中的应用——网络家电控制系统
- BSC:平衡计分卡在绩效管理与信息技术中的应用
- 手持移动数据终端:常见问题与解决办法
- BSC模板:四大领域关键绩效指标详解(财务、客户、运营与成长)
- BSC:从绩效考核到计算机网络的关键概念
- BSC模板:四大维度关键绩效指标详解与预算达成分析
- 平衡计分卡(BSC):绩效考核与战略实施工具
- K-means聚类算法详解及其优缺点
- 平衡计分卡(BSC):从绩效考核到战略实施
- BSC:平衡计分卡与计算机网络中的应用
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


