Ubuntu 16.04高效安装ROS与Google Cartographer SLAM教程
164 浏览量
更新于2023-03-16
3
收藏 200KB DOCX 举报
在Ubuntu 16.04系统上安装Robot Operating System (ROS)和Google Cartographer SLAM(同时进行地图构建和定位)是一个常见的步骤,尤其对于那些从事机器人开发和自动化领域的工程师来说。以下是一个详细的安装指南:
1. 软件源设置:
首先,确保你的Ubuntu 16.04系统已经开启了主仓库(main)、非官方仓库(universe)、受限仓库(restricted)和多宇宙仓库(multiverse)。你可以通过命令行工具`sudo apt-get update`来更新系统,然后访问 http://mirrors.ustc.edu.cn/ubuntu 这个中国科技大学的镜像站下载软件包,因为这样可以提高下载速度。
2. 启用Canonical Partners:
在软件源设置过程中,你可能需要选择启用Canonical Partners,这通常包含一些官方推荐的软件包,但不是所有合作伙伴的软件都会在这里,不过启用它们可以增加软件库的可用性。
3. 更换默认源:
为了安装ROS,你需要更改`/etc/apt/sources.list`文件中的源。原默认源需要替换为中科大的镜像源,按照提供的URL格式,逐行添加或替换原有的源代码列表。例如:
```bash
deb http://mirrors.ustc.edu.cn/ubuntu xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu xenial-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu xenial-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu xenial-backports main restricted universe multiverse
```
4. 更新软件源并安装ROS:
修改完源代码列表后,通过`sudo apt-get update`来更新索引,接着运行`sudo apt-get install ros-xenial-<package_name>`(根据需要安装特定版本的ROS,如`ros-xenial-desktop`或具体算法包),安装所需的ROS软件包。
5. 安装Google Cartographer Slam:
Google Cartographer Slam需要单独安装,因为它不是ROS标准的一部分。首先,确保你已经安装了必要的ROS基础组件。然后,可以通过GitHub或其他官方文档找到Cartographer的安装指南,或者从ROS的包管理器中寻找相关的开发包和依赖项。安装完成后,配置并启动Cartographer服务,它会利用ROS的传感器数据进行SLAM。
6. 测试和调试:
安装并配置好Cartographer之后,通过运行其示例程序或在实际环境中集成到你的机器人系统来验证其性能。可能需要对参数进行调整,并解决可能出现的错误或冲突。
在Ubuntu 16.04上安装ROS和Google Cartographer Slam涉及对软件源的配置、选择合适的ROS版本、安装关键组件以及集成SLAM算法。确保每个步骤都正确执行,以充分利用这些强大的机器人技术。在整个过程中,保持良好的软件管理和日志记录,这对于故障排查和持续优化至关重要。
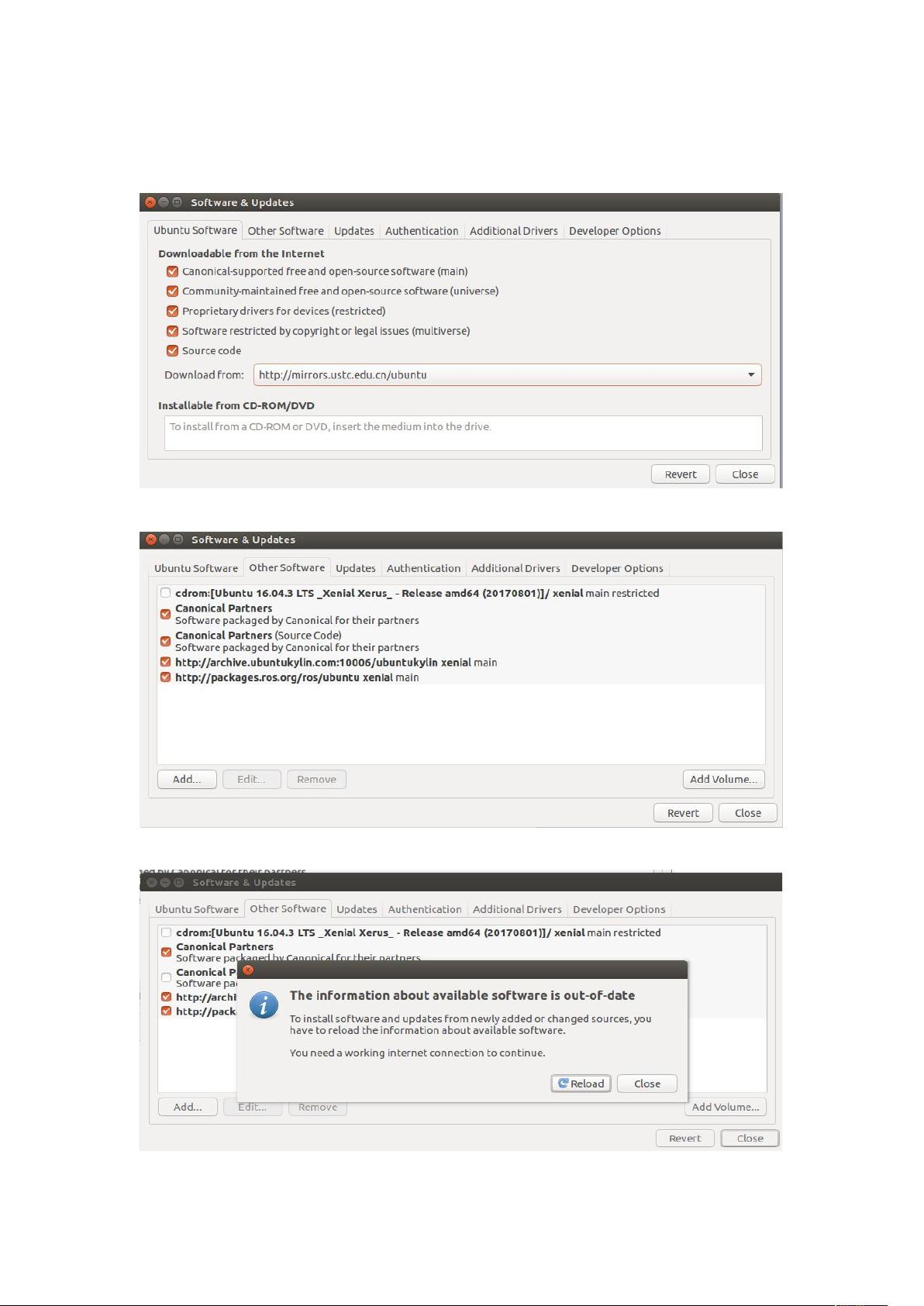
Ubuntu 16.04 安装 ros 以及 Google Cartographer Slam
1、开启 main、universe、restricted、multiverse,Download from:
http//mirrors.ustc.edu.cn/ubuntu
2、选中 Canonical Partners
3、点击 close reload
下载后可阅读完整内容,剩余4页未读,立即下载
2021-04-19 上传
2018-07-20 上传
2019-07-19 上传
2023-03-16 上传
2023-02-14 上传
点击了解资源详情
2022-05-31 上传
2022-05-31 上传
2022-02-14 上传

VJ_Tong
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
