
2003 Oct 22 4
Philips Semiconductors Product specification
High speed CAN transceiver TJA1050
FUNCTIONAL DESCRIPTION
The TJA1050 is the interface between the CAN protocol
controller and the physical bus. It is primarily intended for
high-speed automotive applications using baud rates from
60 kbaud up to 1 Mbaud. It provides differential transmit
capability to the bus and differential receiver capability to
the CAN protocol controller. It is fully compatible to the
“ISO 11898”
standard.
A current-limiting circuit protects the transmitter output
stage from damage caused by accidental short-circuit to
either positive or negative supply voltage, although power
dissipation increases during this fault condition.
A thermal protection circuit protects the IC from damage
by switching off the transmitter if the junction temperature
exceeds a value of approximately 165 °C. Because the
transmitter dissipates most of the power, the power
dissipation and temperature of the IC is reduced. All other
IC functions continue to operate. The transmitter off-state
resets when pin TXD goes HIGH. The thermal protection
circuit is particularly needed when a bus line short-circuits.
The pins CANH and CANL are protected from automotive
electrical transients (according to
“ISO 7637”
; see Fig.4).
Control pin S allows two operating modes to be selected:
high-speed mode or silent mode.
The high-speed mode is the normal operating mode and is
selected by connecting pin S to ground. It is the default
mode if pin S is not connected. However, to ensure EMI
performance in applications using only the high-speed
mode, it is recommended that pin S is connected to
ground.
In the silent mode, the transmitter is disabled. All other
IC functions continue to operate. The silent mode is
selected by connecting pin S to V
CC
and can be used to
prevent network communication from being blocked, due
to a CAN controller which is out of control.
A ‘TXD dominant time-out’ timer circuit prevents the bus
lines being driven to a permanent dominant state (blocking
all network communication) if pin TXD is forced
permanently LOW by a hardware and/or software
application failure. The timer is triggered by a negative
edge on pin TXD. If the duration of the LOW-level on
pin TXD exceeds the internal timer value, the transmitter is
disabled, driving the bus into a recessive state. The timer
is reset by a positive edge on pin TXD.
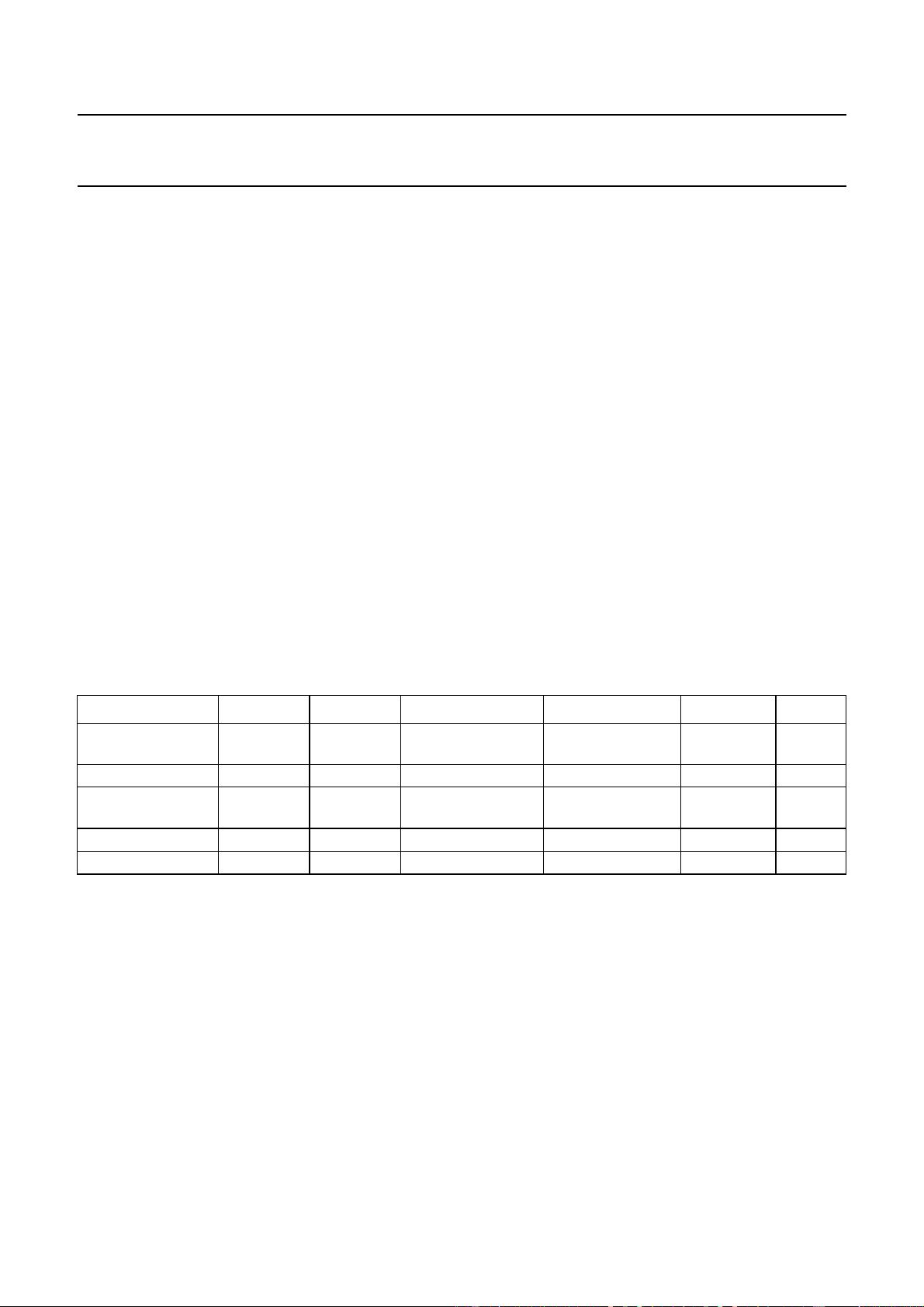
Table 1 Function table of the CAN transceiver; X = don’t care
V
CC
TXD S CANH CANL BUS STATE RXD
4.75 V to 5.25 V LOW LOW (or
floating)
HIGH LOW dominant LOW
4.75 V to 5.25 V X HIGH 0.5V
CC
0.5V
CC
recessive HIGH
4.75 V to 5.25 V HIGH (or
floating)
X 0.5V
CC
0.5V
CC
recessive HIGH
<2 V (not powered) X X 0 V < V
CANH
<V
CC
0V<V
CANL
<V
CC
recessive X
2V<V
CC
< 4.75 V >2 V X 0 V < V
CANH
<V
CC
0V<V
CANL
<V
CC
recessive X
剩余17页未读,继续阅读

qq_41146998
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 计算机系统基石:深度解析与优化秘籍
- 《ThinkingInJava》中文版:经典Java学习宝典
- 《世界是平的》新版:全球化进程加速与教育挑战
- 编程珠玑:程序员的基础与深度探索
- C# 语言规范4.0详解
- Java编程:兔子繁殖与素数、水仙花数问题探索
- Oracle内存结构详解:SGA与PGA
- Java编程中的经典算法解析
- Logback日志管理系统:从入门到精通
- Maven一站式构建与配置教程:从入门到私服搭建
- Linux TCP/IP网络编程基础与实践
- 《CLR via C# 第3版》- 中文译稿,深度探索.NET框架
- Oracle10gR2 RAC在RedHat上的安装指南
- 微信技术总监解密:从架构设计到敏捷开发
- 民用航空专业英汉对照词典:全面指导航空教学与工作
- Rexroth HVE & HVR 2nd Gen. Power Supply Units应用手册:DIAX04选择与安装指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


