没有合适的资源?快使用搜索试试~
我知道了~
首页
OV9281_PCLK_计算公式.pdf
OV9281_PCLK_计算公式.pdf
OV9281
PCLK
3星
· 超过75%的资源
需积分: 50
71 下载量
75 浏览量
更新于2023-05-13
2
收藏
288KB
PDF
举报
立即下载
开通VIP(低至0.43/天)
送3个月
身份认证 购VIP最低享 7 折!
领优惠券(最高得80元)
此文档用来描述OV9281的PCLK是如何计算出来的。 包括了详细的寄存器配置。输入时钟、输出像素时钟。
资源详情
资源推荐
OV9281 PCLK
计
算公式
//
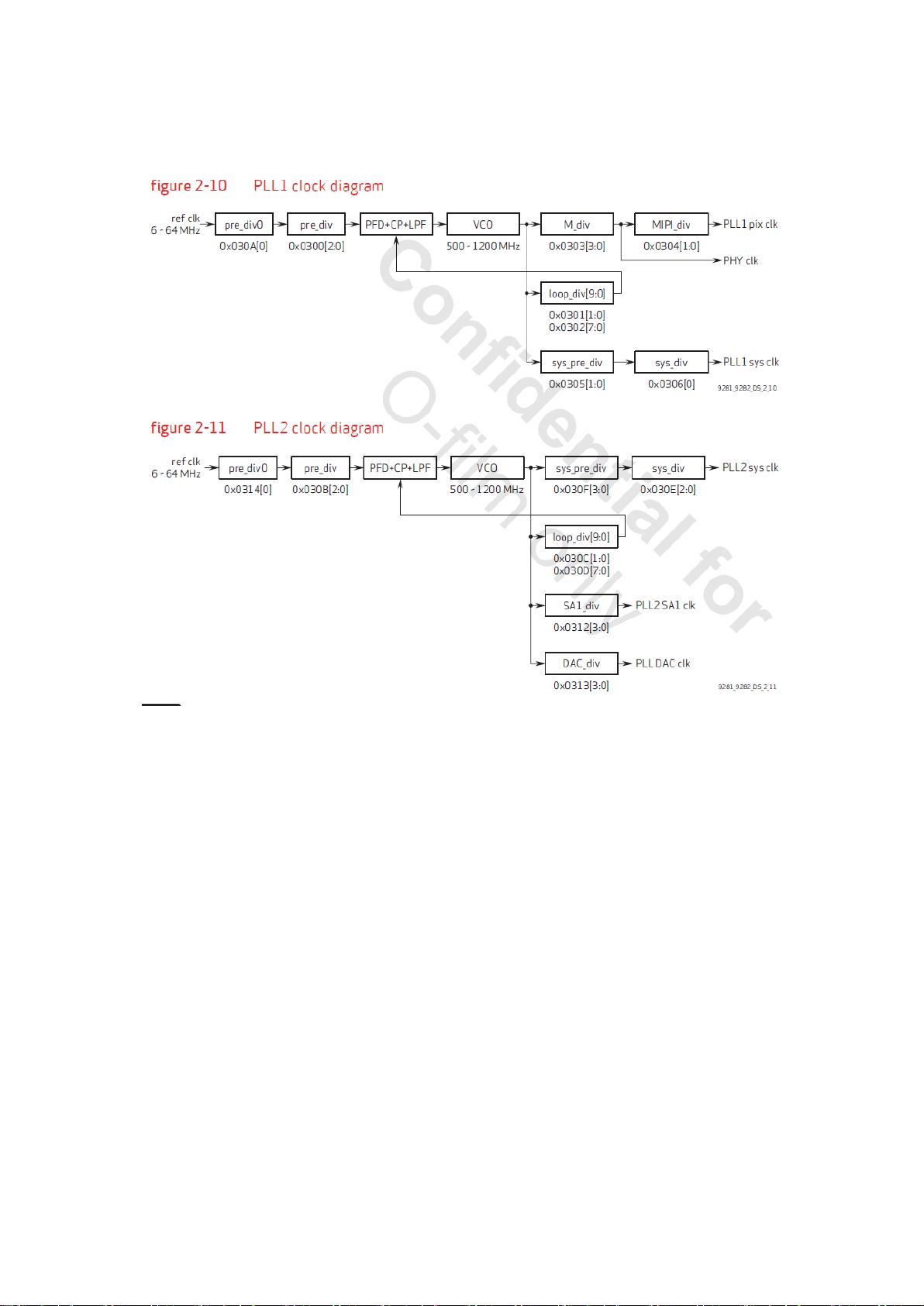
--- PLL setting
---
//
//MIPI_PCLK = MCLK / p
ll1_pre_div0 / pll1_pre_div1 * pll1_mul /
pll1_m_div / pll1_mipi_
div
//96M = 24M/ 1(030a
[0]) /1.5(0300[2:0]) * 48(0301
[1:0],0302[7:0]) / 1(0303[3:0]) / 8
(0304[1:0])
本内容试读结束,
登录后
可阅读更多
下载后可阅读完整内容,剩余0页未读,
立即下载
OV9281全局sensor
OV9281完整说明书,有所有寄存器相关配置说明,有硬件设置相关参考等内容,方便sensor设计和调试
OV9281摄像头模组规格书
OV9281摄像头模组规格书,结构设计图,原始代码,配置代码,尺寸图,镜头参数等等
OV9281-datasheet
OV9281 is a global shutter cmos sensor datsheet, 有需要的朋友可以下载
#include <dummy.h> #include "esp_camera.h" #include <WiFi.h> #define CAMERA_MODEL_AI_THINKER #include "camera_pins.h" const char* ssid = "666"; const char* password = "qqljc123"; void startCameraServer(); void setup() { Serial.begin(115200); Serial.setDebugOutput(true); Serial.println(); camera_config_t config; config.ledc_channel = LEDC_CHANNEL_0; config.ledc_timer = LEDC_TIMER_0; config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM; config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM; config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM; config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM; config.pin_xclk = XCLK_GPIO_NUM; config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sscb_sda = SIOD_GPIO_NUM; config.pin_sscb_scl = SIOC_GPIO_NUM; config.pin_pwdn = PWDN_GPIO_NUM; config.pin_reset = RESET_GPIO_NUM; config.xclk_freq_hz = 20000000; config.pixel_format = PIXFORMAT_JPEG; if(psramFound()){ config.frame_size = FRAMESIZE_UXGA; config.jpeg_quality = 10; config.fb_count = 2; } else { config.frame_size = FRAMESIZE_SVGA; config.jpeg_quality = 12; config.fb_count = 1; } #if defined(CAMERA_MODEL_ESP_EYE) pinMode(13, INPUT_PULLUP); pinMode(14, INPUT_PULLUP); #endif esp_err_t err = esp_camera_init(&config); if (err != ESP_OK) { Serial.printf("Camera init failed with error 0x%x", err); return; } sensor_t * s = esp_camera_sensor_get(); if (s->id.PID == OV3660_PID) { s->set_vflip(s, 1); s->set_brightness(s, 1); s->set_saturation(s, -2); } s->set_framesize(s, FRAMESIZE_QVGA); #if defined(CAMERA_MODEL_M5STACK_WIDE) || defined(CAMERA_MODEL_M5STACK_ESP32CAM) s->set_vflip(s, 1); s->set_hmirror(s, 1); #endif WiFi.begin(ssid, password); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(""); Serial.println("WiFi connected"); startCameraServer(); Serial.print("Camera Ready! Use 'http://"); Serial.print(WiFi.localIP()); Serial.println("' to connect"); } void loop() { delay(10000); } 每句代码具体意思解释
26. `if (s->id.PID == OV3660_PID) {...}`:如果摄像头传感器的PID为OV3660_PID,执行下面的代码块。 27. `s->set_vflip(s, 1);`:设置传感器垂直翻转。 28. `s->set_brightness(s, 1);`:设置传感器亮度。 29. `s-...
#include "main.h" #include "stdio.h" #include "string.h" #include "time.h" UART_HandleTypeDef huart1; void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_USART1_UART_Init(void); int main(void) { HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_USART1_UART_Init(); while (1) { time_t now = time(NULL); struct tm *timeinfo = localtime(&now); char time_str[9]; sprintf(time_str, "%02d:%02d:%02d", timeinfo->tm_hour, timeinfo->tm_min, timeinfo->tm_sec); HAL_UART_Transmit(&huart1, (uint8_t *)time_str, strlen(time_str), HAL_MAX_DELAY); HAL_Delay(1000); } } void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } static void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } } static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_RESET); /*Configure GPIO pin : PA9 */ GPIO_InitStruct.Pin = GPIO_PIN_9; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } 在以上代码的基础上,编写代码以实现计算发送 hh:mm:ss到单片机,修改单片机时间
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct....
void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); } }逐句注释这段函数
RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; // 配置系统时钟和总线时钟类型 RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // 系统时钟源为PLL RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_...
修改以下程序,使其接收指令后发送一个hello,world字符串。#include "main.h"#include "usart.h"#include "gpio.h"#include "stdio.h"#include "string.h"uint8_t aRxBuffer;void SystemClock_Config(void);int fputc(int ch, FILE *f){ uint8_t temp[1] = {ch}; HAL_UART_Transmit(&huart1, temp, 1, 0xffff);return ch;}int fgetc(FILE * f){ uint8_t ch = 0; HAL_UART_Receive(&huart1,&ch, 1, 0xffff); return ch;}int main(void){ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1); user_main_printf(""); /* USER CODE END 2 */ while (1) { }}void SystemClock_Config(void){ RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI_DIV2; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL2; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK) { Error_Handler(); }}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){ char *pCmd = NULL; uint8_t len; switch(aRxBuffer){ case '1': pCmd = "command 1\r\n"; len = strlen(pCmd); break; case '2': pCmd = "command 2\r\n"; len = strlen(pCmd); break; case '3': pCmd = "command 3\r\n"; len = strlen(pCmd); break; case '4': pCmd = "command 4\r\n"; len = strlen(pCmd); break; default: pCmd = "command cmd\r\n"; len = strlen(pCmd); break; } HAL_UART_Transmit(&huart1, (uint8_t *)pCmd, len,0xFFFF); HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1); }void Error_Handler(void){}#ifdef USE_FULL_ASSERTvoid assert_failed(uint8_t *file, uint32_t line){ }#endif
RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_...
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); } }
首先,通过设置RCC_ClkInitStruct.ClockType来选择要配置的时钟类型,包括HCLK、SYSCLK、PCLK1和PCLK2。然后,将RCC_ClkInitStruct.SYSCLKSource设置为RCC_SYSCLKSOURCE_PLLCLK,以将PLL作为系统时钟源。接着,设置...
hadc1.Instance = ADC1; hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4; hadc1.Init.Resolution = ADC_RESOLUTION_12B; hadc1.Init.ScanConvMode = DISABLE; hadc1.Init.ContinuousConvMode = DISABLE; hadc1.Init.DiscontinuousConvMode = DISABLE; hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE; hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START; hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT; hadc1.Init.NbrOfConversion = 1; hadc1.Init.DMAContinuousRequests = DISABLE; hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV; if (HAL_ADC_Init(&hadc1) != HAL_OK) { Error_Handler(); }
- `hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;`:设置ADC时钟预分频为PCLK的1/4。 - `hadc1.Init.Resolution = ADC_RESOLUTION_12B;`:设置ADC的分辨率为12位。 - `hadc1.Init.ScanConvMode = DISABLE;...
void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 25; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 7; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); } }解释
这是 STM32 微控制器中的 SystemClock_Config 函数,用于配置系统时钟。 首先,将 RCC_OscInitTypeDef 结构体中的成员变量赋值,指示使用外部高速晶体振荡器(HSE)作为时钟源,并打开 HSE 振荡器和 PLL 锁相环。...
void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK) { Error_Handler(); } }
4. 在`RCC_ClkInitStruct`结构体中,设置了时钟类型为HCLK、SYSCLK、PCLK1和PCLK2,这些时钟分别对应CPU、AHB和APB总线的时钟。`SYSCLKSource`设置为HSI,表示使用HSI作为系统时钟源。 5. 设置了时钟分频系数,`...
void Init_ADC1() { ADC_InitTypeDef MyADC; GPIO_InitTypeDef MyGPIO; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); MyGPIO.GPIO_Mode=GPIO_Mode_AIN; MyGPIO.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4; GPIO_Init(GPIOA,&MyGPIO); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_ADC1,ENABLE); RCC_ADCCLKConfig(RCC_PCLK2_Div6); MyADC.ADC_Mode= ADC_Mode_Independent; MyADC.ADC_ContinuousConvMode=DISABLE;MyADC.ADC_ScanConvMode=DISABLE; MyADC.ADC_DataAlign=ADC_DataAlign_Right; MyADC.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None; MyADC.ADC_NbrOfChannel=1; ADC_Init(ADC1,&MyADC); ADC_Cmd(ADC1,ENABLE); ADC_SoftwareStartConvCmd(ADC1,ENABLE); }注释
这是一段初始化ADC1模块的代码,主要完成以下功能: 1. 开启GPIOA和ADC1的时钟。 2. 配置GPIOA的引脚0-4为模拟输入模式。 3. 配置ADC1的工作模式为独立模式、单次转换、右对齐、不使用扫描模式、不使用外部触发...
__HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 4; RCC_OscInitStruct.PLL.PLLN = 168; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;//0x02 RCC_OscInitStruct.PLL.PLLQ = 7; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;//0x04 RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;//0x02 if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK) { Error_Handler(); } CAN频计算过程
根据给出的代码,可以看出使用的是外部高速晶体振荡器(HSE),其频率为8MHz。经过PLL倍频后,SYSCLK的主频为168MHz,根据APB1和APB2的分频系数可得: - APB1时钟频率为SYSCLK/4=42MHz。 - APB2时钟频率为SYSCLK/2=...
esp32cam ov2640数据
ESP32-CAM模块使用OV2640图像传感器进行图像采集,可以通过以下方式获取图像数据: 1. 使用Arduino IDE中的ESP32-CAM库进行开发,使用`camera.capture()`函数获取图像数据,如下所示: ```c++ #include "esp_...
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; ADC_InitStructure.ADC_ScanConvMode = ENABLE ; ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; ADC_InitStructure.ADC_NbrOfChannel = 2; ADC_Init(ADC1, &ADC_InitStructure); RCC_ADCCLKConfig(RCC_PCLK2_Div8); ADC_RegularChannelConfig(ADC1,ADC_Channel_6,1,ADC_SampleTime_239Cycles5); ADC_RegularChannelConfig(ADC1,ADC_Channel_7,2,ADC_SampleTime_239Cycles5); ADC_DMACmd(ADC1, ENABLE); ADC_Cmd(ADC1, ENABLE); ADC_ResetCalibration(ADC1); while(ADC_GetResetCalibrationStatus(ADC1)); ADC_StartCalibration(ADC1); while(ADC_GetCalibrationStatus(ADC1)); ADC_SoftwareStartConvCmd(ADC1, ENABLE); }标注这些代码的意思
8. RCC_ADCCLKConfig(RCC_PCLK2_Div8); 配置ADC时钟,将APB2总线的时钟分频为8作为ADC的时钟。 9. ADC_RegularChannelConfig(ADC1,ADC_Channel_6,1,ADC_SampleTime_239Cycles5); 配置ADC的常规通道1为ADC_Channel_6...
ov5640摄像头显示例程
以下是使用 OV5640 摄像头的显示例程: ```c #include <stdio.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "driver/gpio.h" #include "driver/i2c.h" #include "esp_camera.h" #...
STM32F103RC开发板的RCC_ADCCLKConfig(RCC_PCLK2_Div6);语句
在 STM32F103RC 开发板上,RCC_ADCCLKConfig(RCC_PCLK2_Div6) 语句的作用是配置 ADC 时钟源。具体来说,RCC_PCLK2_Div6 表示将 APB2 总线时钟的频率除以 6,作为 ADC 时钟的频率,这样可以避免 ADC 工作频率过高而...
esp32-cam 视频流抽针
config.pin_pclk = PCLK_GPIO_NUM; config.pin_vsync = VSYNC_GPIO_NUM; config.pin_href = HREF_GPIO_NUM; config.pin_sscb_sda = SIOD_GPIO_NUM; config.pin_sscb_scl = SIOC_GPIO_NUM; config.pin_pwdn = ...
OV9281-Preliminary-Specification-CSP5_Version-1-1_Omnivision.pdf
OV9281-Preliminary-Specification-CSP5_Version-1-1_Omnivision.pdf
ov9281 spec 全
全的ov9281 spec, 官网上给出的文档信息不够,这个是全的
EDAStar
粉丝: 1
资源:
9
私信
上传资源 快速赚钱
我的内容管理
收起
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
会员权益专享
图片转文字
PDF转文字
PDF转Word
PDF加水印
全年可省5,000元
立即开通
最新资源
数据结构课程设计:模块化比较多种排序算法
哈夫曼树实现文件压缩解压程序分析
数据结构课程设计:电梯模拟与程序实现
数据结构算法实验:C++实现线性表、查找、排序
数据结构实验:C语言实现素数、数组逆序与鞍点查找
数据结构实验与习题解析
数据结构与算法笔试关键考点解析
数据结构与算法实验:顺序表操作指南
数据结构C语言版讲义概述
C语言数据结构复习指南:从基础到算法详解
C语言实现数据结构:串的基本操作
基于SQLServer的药品进销存管理系统设计
VHDL语言基础入门与应用解析
使用ACCESS构建的库存管理系统设计
VHDL课程设计:PS2键盘接口与解析
数据中心机房智能化监控解决方案
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功