交通感知空间网络中避开拥堵的路径规划
196 浏览量
更新于2024-07-14
收藏 1.42MB PDF 举报
本文主要探讨了在交通感知的空间网络中规划畅通路径的问题,发表于2015年的《地理信息系统》(Geoinformatica)期刊,卷19,页码723-746,DOI:10.1007/s10707-015-0227-9。随着近年来路线规划和推荐系统的关注度提升,作者们关注到了在考虑交通状况的背景下,如何避免潜在拥堵,设计出高效的路径方案。
研究者们提出了两个新颖的交通感知路径规划问题,即时间阈值查询(Time-Threshold Unobstructed Path, TTUP)和概率阈值查询(Probability-Threshold Unobstructed Path, PTUP)。TTUP查询的一个实例是:“从登机口到SK1217航班的最短路径,其可能遭遇的拥堵概率不超过45分钟。”这种查询适用于室内空间环境,但在户外空间也具有应用价值。另一个查询是寻找“从登机口到SK1217航班的最快路径,其拥堵概率低于20%”。这两个查询的目标都是为了提供更加实际、可靠的导航建议,考虑到用户对行程时间和拥堵风险的敏感性。
在研究方法上,作者可能采用了数据分析和机器学习技术来预测交通流量,并结合网络拓扑结构和实时交通数据,通过算法来计算每条路径的预计拥堵概率。他们可能还构建了一个模型,该模型能动态地更新路径的实时状况,以应对不断变化的交通条件。
为了解决这些问题,研究者提出了一种可能的解决方案,这可能包括路径搜索算法的优化,比如Dijkstra算法或A*算法的改进版本,以及结合概率统计的启发式策略。此外,他们可能还探讨了如何在大规模网络中高效地处理这些查询,考虑到查询响应时间和计算资源的平衡。
本文的研究成果对于城市规划、交通管理和移动应用等领域具有重要意义,因为它提供了基于实时交通信息的路径规划建议,有助于提高用户的出行效率和舒适度。同时,这项工作也为未来的研究指明了方向,即如何更好地将深度学习、人工智能等先进技术融入到交通感知路径规划中,以实现更智能的导航服务。
Geoinformatica (2015) 19:723–746 727
2.2 Uncertain trajectory reconstruction algorithm
Given a spatial network G(V , E), each vertex v ∈ G.V is allocated a threshold v.k to
describe its traffic processing capability. That means at most v.k moving objects can be
processed at vertex v in one minute, and each individual moving object will take
1
v.k
minutes
processing time.
Given an uncertain trajectory segment τ
seg
(p
i
,p
j
) connecting two adjacent sample
points p
i
and p
j
, it is difficult to find the exact path P(p
i
,p
j
) between them due to the
rough route planning (indoor) or trajectory compression loss (outdoor). Here, we propose
a random walk based probabilistic model to evaluate the uncertainty of trajectories, and
all possibilities are considered. Conceptually, we assume that the movement of object o
between p
i
and p
j
is according to a random walk, and its moving space is constrained
by two thresholds. First, the maximum moving time between p
i
and p
j
is constrained by
(p
j
.t − p
i
.t),wherep
i
.t and p
j
.t are the timestamps of p
i
and p
j
, respectively. Second,
there should be no loop in P(p
i
,p
j
), which means that one vertex cannot appear twice in
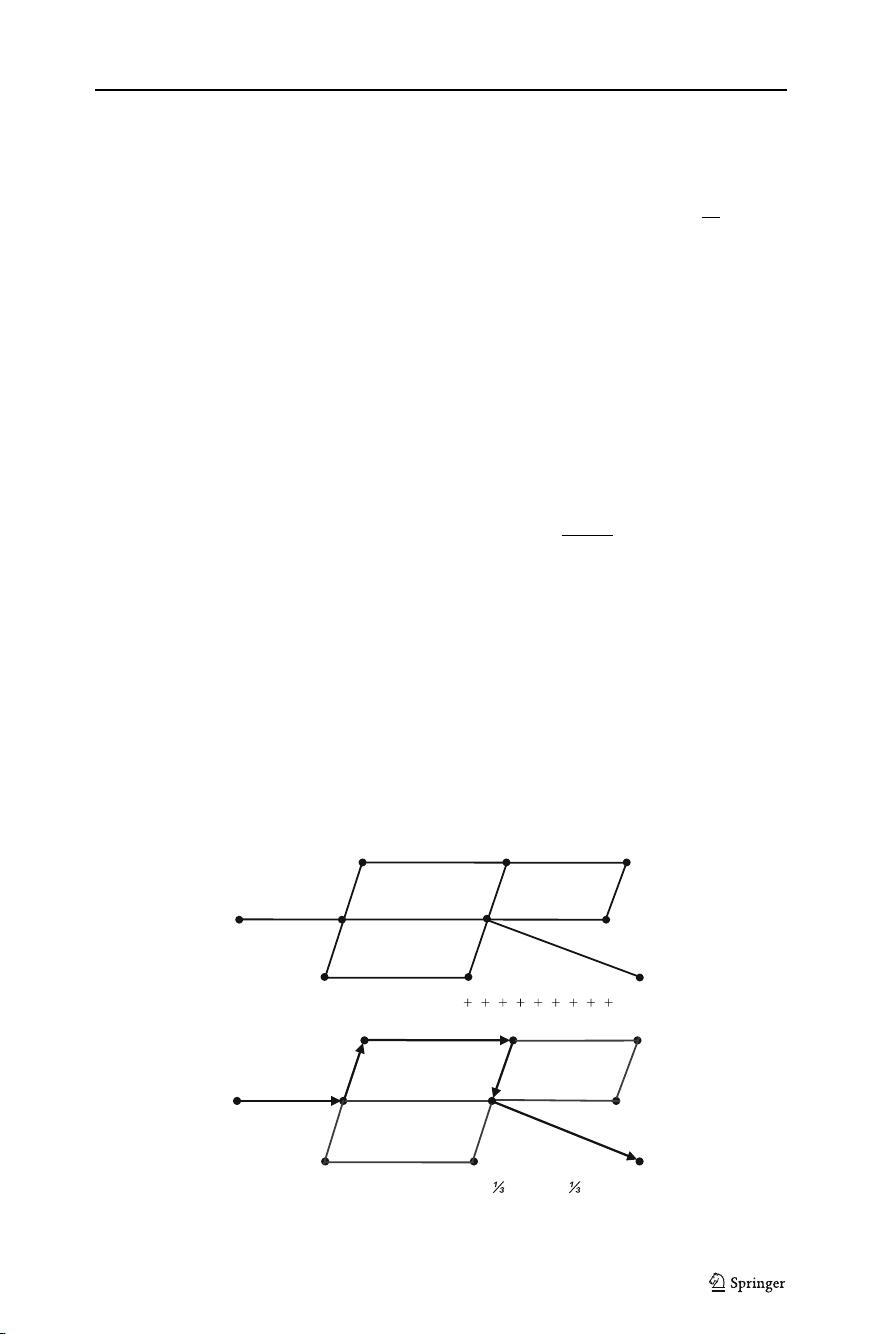
one path. The length and probability of path P =p
1
,...,p
k
are defined as follows:
P.length =
k−1
i=1
(p
i
,p
i+1
).weight +
1
p
i+1
.k
(1)
P.prob =
k−1
i=1
(p
i
,p
i+1
).prob (2)
Here, (p
i
,p
i+1
).weight and (p
i
,p
i+1
).prob are the weight and probability of edge
(p
i
,p
i+1
), respectively. Suppose a moving object o is at vertex p
i
and it may select edge
(p
i
,p
i+1
) as its following moving direction. This probability is defined as the probability
of edge (p
i
,p
i+1
).
p
1
n
1
n
4
n
2
n
3
n
5
p
2
6
7 6
3
8
n
6
n
7
n
8
3
7
7
3
3
3
6
P
1
=<p
1,
n
1,
n
2,
n
4,
n
5,
p
2
> P
1
.length=6 1 3 1 7 1 3 1 8 1=32
p
1
n
1
n
4
n
2
n
3
n
5
p
2
1/1
n
6
n
7
n
8
1/3
1/1
1/2
1/3
P
1
=<p
1,
n
1,
n
2,
n
4,
n
5,
p
2
> P
1
.prob =1 xx1 x ½ x = 1/18
Fig. 1 Probabilistic model
剩余23页未读,继续阅读
2022-07-10 上传
2021-12-15 上传
2023-07-27 上传
2023-07-22 上传
2023-04-22 上传
2023-07-11 上传
2023-05-13 上传
2023-05-01 上传
2023-07-13 上传

weixin_38668335
- 粉丝: 7
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
