A*寻路算法详解:直观易懂的路径规划
"这篇文章主要介绍了A*(AStar)算法,一种用于寻找两点间最短路径的搜索算法。文章通过图示和简单的解释,使得该算法对于新手来说易于理解。A*算法通常应用于游戏开发、地图导航等领域,帮助计算角色或物体如何从起点到达终点。"
A*算法的核心在于它结合了启发式信息来指导搜索,从而提高了效率,避免了盲目地探索所有可能的路径。在A*算法中,每个节点都有三个关键值:
1. **G值** (G-score):从起点A到当前节点的实际代价。每次从一个节点移动到另一个节点,G值都会增加,代表实际走过的距离。
2. **H值** (Heuristic-score):从当前节点到目标B的预计代价,这是启发式函数的输出,通常使用曼哈顿距离或欧几里得距离来估计。H值是对未来成本的预测,它帮助算法优先考虑更可能接近目标的节点。
3. **F值** (F-score):G值和H值之和,是A*算法选择下一个节点的基础。F值较低的节点会被优先处理,因为它们更可能指向最短路径。
在搜索过程中,A*算法使用一个开启列表(Open List)存储待处理的节点,以及一个关闭列表(Closed List)存储已经处理过的节点。算法从起点A开始,将其添加到开启列表,然后不断选择F值最低的节点进行扩展。当扩展一个节点时,会检查其邻居,将可达的邻居加入开启列表并更新它们的G值和H值(基于它们到目标的距离),同时设置它们的父节点为当前节点。
在选择下一个节点时,A*算法使用启发式函数(如曼哈顿距离或欧几里得距离)来估算从当前节点到目标的直线距离。启发式函数必须是** admissible**(保守的,即不高估实际代价)和** consistent**(满足三角不等式,即从A到C的距离加上从C到B的距离至少等于从A到B的距离)。这两个属性确保A*算法能找到最优解。
随着搜索的进行,节点从开启列表转移到关闭列表。当目标节点出现在开启列表中,或者开启列表为空(意味着没有路径可达目标),搜索结束。此时,可以通过每个节点的父节点信息回溯,生成从起点到目标的完整路径。
总结来说,A*算法是一种高效且实用的路径规划方法,通过合理利用启发式信息,能够在大型网格或复杂环境中快速找到最短路径。其直观易懂的特性使得它成为初学者学习寻路算法的理想选择。
[图 4]
首先,我们把它从开启列表中取出,放入关闭列表(这就是他被蓝色突出显示的原因)。然
后我们检查相邻的格子。哦,右侧的格子是墙,所以我们略过。左侧的格子是起始格。它
在关闭列表里,所以我们也跳过它。
其他 4 格已经在开启列表里了,于是我们检查 G 值来判定,如果通过这一格到达那里,路
径是否更好。我们来看选中格子下面的方格。它的 G 值是 14。如果我们从 当前格移动到
那里,G 值就会等于 20(到达当前格的 G 值是 10,移动到上面的格子将使得 G 值增加 10)。
因为 G 值 20 大于 14,所以这不是更好的路径。如 果你看图,就能理解。与其通过先水平
移动一格,再垂直移动一格,还不如直接沿对角线方向移动一格来得简单。
当我们对已经存在于开启列表中的 4 个临近格重复这一过程的时候,我们发现没有一条路
径可以通过使用当前格子得到改善,所以我们不做任何改变。既然我们已经检查过了所有
邻近格,那么就可以移动到下一格了。
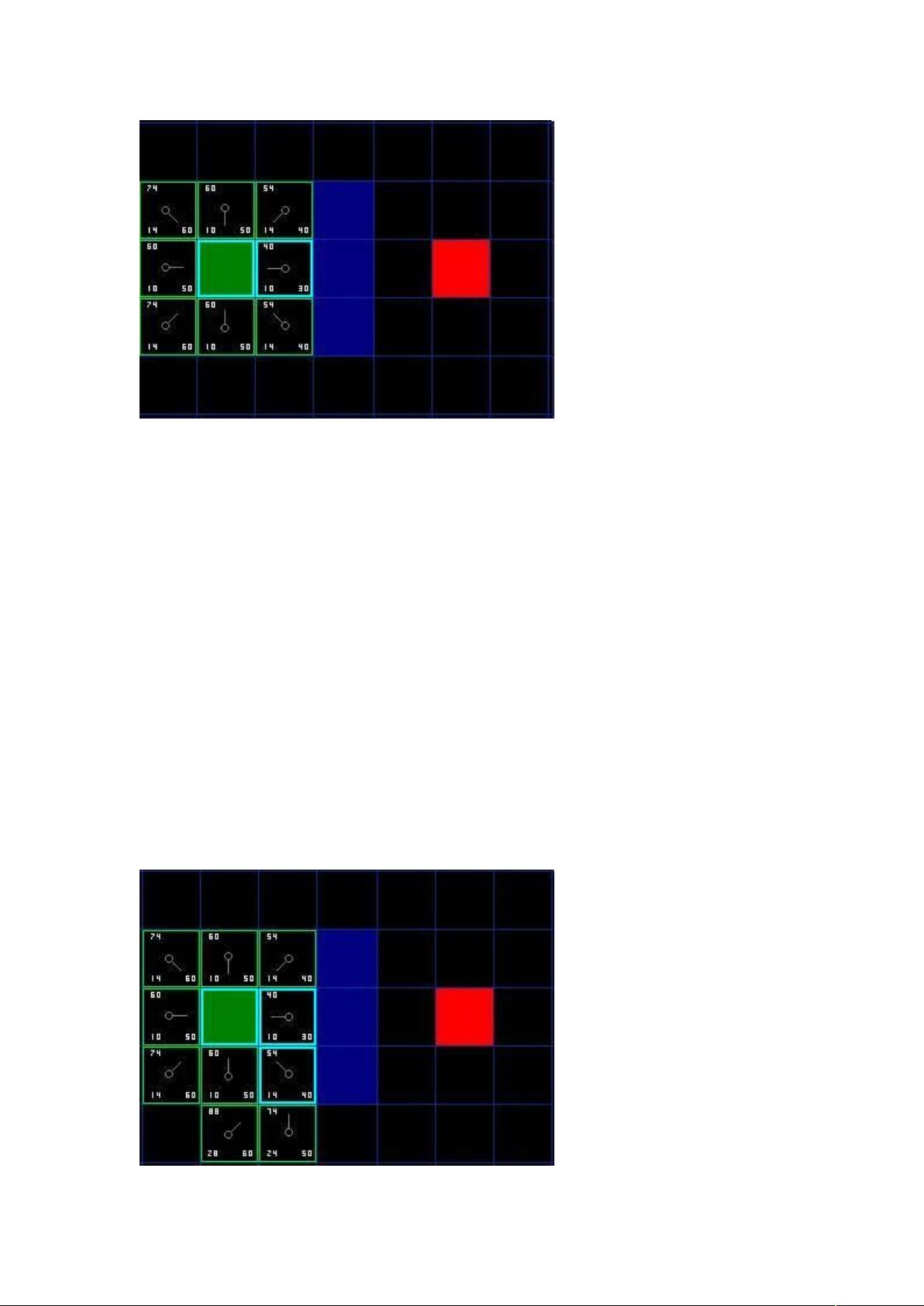
于是我们检索开启列表,现在里面只有 7 格了,我们仍然选择其中 F 值最低的。有趣的是,
这次,有两个格子的数值都是 54。我们如何选择?这并不麻烦。从速度 上考虑,选择最后
添加进列表的格子会更快捷。这种导致了寻路过程中,在靠近目标的时候,优先使用新找
到的格子的偏好。但这无关紧要。(对相同数值的不同对 待,导致不同版本的 A*算法找
到等长的不同路径。)
那我们就选择起始格右下方的格子,如图。
剩余16页未读,继续阅读
2020-03-08 上传
2023-05-19 上传
2023-11-23 上传
2023-05-12 上传
2023-04-07 上传
2023-05-14 上传
2024-10-02 上传
2023-12-18 上传

中通电力-人力驻场
- 粉丝: 1
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
