
一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐
标系)来进行变换的步骤。如果将从基座到第一关节,再从第一关节到第二关节
直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
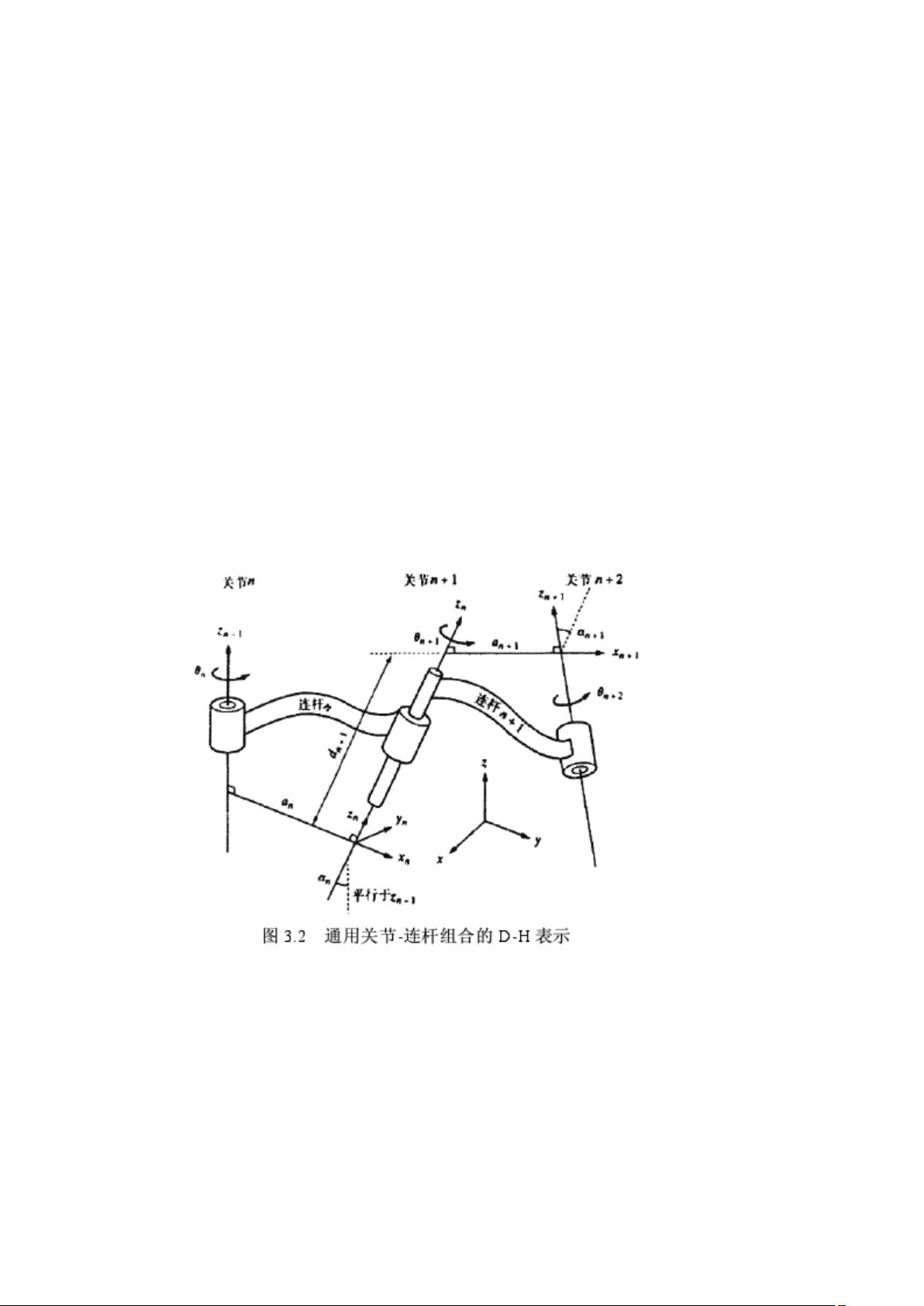
图 3.2 表示了三个关节,每个关节都是可以转动或平移的。第一个关节指
定为关节 n,第二关节为关节 n+1,第三个关节为关节 n+2。在这些关节的前后
可能还有其他关节。连杆也是如此表示,连杆 n 位于关节 n 与 n+1 之间,连杆 n+1
位于关节 n+1 与 n+2 之间。
连杆构件坐标系的选择及参数的规定如下:
(1)所有关节,都用 z 轴表示。如果是旋转关节,z 轴位于按右手规则旋转的
方向。如果是滑动关节,z 轴为沿直线运动的方向,
i
z
坐标轴是沿着 i+1 关节的
运动轴。
(2)x
i
是沿着
i
z
的公垂线,指向离开
1�i
z
,轴的方向。
(3)
i
y
轴的方向按构成
iii
zyx
右手直角坐标系来建立。
(4) 公垂线长度
i
a
是
1�i
z
和
i
z
两轴间的最小距离,一般称
i
a
为连杆长度。
(5)两公垂线
1�i
a
和
i
a
之间的距离称为连杆距离
i
d
。
(6)
1�i
x
轴与之间的夹角为
i
�
,以绕
1�i
z
轴右旋为正,一般称
i
�
为连杆的夹
角。
(7)
1�i
z
和
i
z
之间的夹角
i
a
,以绕
i
x
轴右旋为正,
i
a
称为扭转角。
根据上述规则,给所有的连杆赋予坐标系,并且可以建立 i-1 和 i 坐标系之
间的变换关系。应当说明的是,尽管
i
z
通过关节 i+1 的轴线,但坐标系
iii
zyx
固
剩余15页未读,继续阅读

老帽爬新坡
- 粉丝: 85
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







