飞思卡尔智能车模型:C语言编程与实战技巧
版权申诉
83 浏览量
更新于2024-07-02
收藏 649KB DOCX 举报
"飞思卡尔C语言飞思卡尔C语言"
本文档主要涵盖了飞思卡尔智能车模相关的技术设计和实现,特别是与C语言编程相关的知识。飞思卡尔杯全国大学生智能车大赛是一个重要的赛事,参赛队伍需要利用飞思卡尔单片机进行智能车的开发,其中C语言是常用的编程工具。以下将详细介绍智能车的关键技术和C语言编程框架。
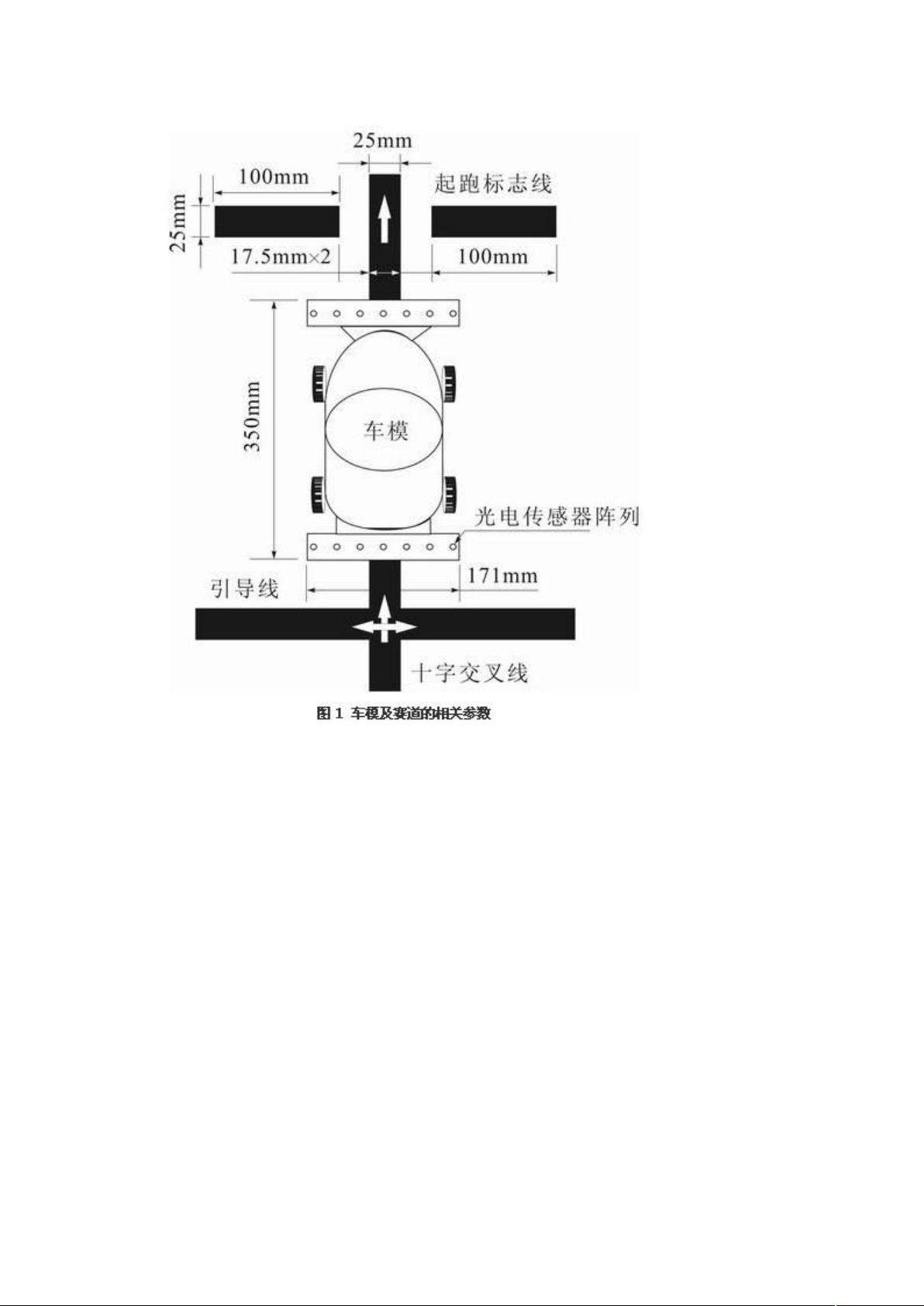
一、智能车起跑线识别方法
起跑线识别是智能车比赛中的关键环节,通常涉及到图像处理和传感器技术。通过摄像头或光电传感器来识别赛道起点,确保智能车能够准确启动。在C语言编程中,这可能涉及到灰度处理、边缘检测等图像算法,以及传感器数据的采集和解析。
二、智能车运动状态实时监测
智能车运动状态的实时监测系统设计,包括速度、方向等参数的测量,需要高效的软件架构。C语言的结构化特性使得它适合构建这样的系统,通过中断服务程序处理传感器数据,实时更新车模状态,并可能利用PID控制器或其他控制算法调整车模行为。
三、单片机C语言编程框架
飞思卡尔单片机的C语言编程框架通常包括初始化设置、主循环、中断服务函数等部分。初始化设置涉及硬件配置,如时钟、串口、I/O口等。主循环负责处理常规任务,而中断服务函数则用于处理突发事件,如传感器检测到的数据变化。
四、智能车改造与优化
车模改造旨在提高性能,包括舵机的优化、电池位置的调整、控制电路板的布局以及传感器的安置。C语言编程在此阶段可能涉及到对舵机控制的精确控制算法,以及对传感器数据的高效处理。
五、传感器安置
摄像头组和光电组的传感器安置策略各有不同。摄像头通常需要调整到合适角度,以获取赛道的最佳视野。光电传感器的布局可能为单排、双排或特殊形状如W型、U型,以适应不同赛道条件。C语言编程中,这些传感器的数据读取和处理是实现智能车自主行驶的关键。
六、比赛实况
文档中提及了历届比赛的实况,如东北赛区的预赛和决赛成绩,这反映了各队的技术水平和比赛策略。这些数据对于后来的参赛者具有参考价值,可以帮助他们理解比赛规则和提升技术。
飞思卡尔C语言编程不仅涉及到基础的单片机控制,还涵盖图像处理、传感器技术、系统优化等多个方面,这些都是智能车设计和竞赛中的核心知识点。通过学习和实践这些内容,学生可以提升自己的嵌入式开发能力,并在实际比赛中取得优异成绩。

&*@>8>KK+
#!/,O"*+>
J
2##!/,O:*2#+: 延时函数
?
")#>
&*@>8>KK+>
J
2##!/,O:*")#+4: 延时函数
?
")#@>
&*@>8>KK+
#!/,O:*+>
J
/!!"/!N/!!/!
2#:/*2#+
?
!#O*+>
H!*+
?
!#OHO:#*B+>清屏

剩余59页未读,继续阅读
2022-07-02 上传
2019-06-24 上传
2023-05-29 上传
2023-07-27 上传
2023-05-29 上传
2024-01-19 上传
2023-11-17 上传
2023-05-05 上传
2023-10-23 上传

omyligaga
- 粉丝: 61
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
