TJA1145T CAN驱动芯片手册:超低功耗,唤醒功能
需积分: 11 69 浏览量
更新于2024-07-16
收藏 399KB PDF 举报
"TJA1145T是恩智浦半导体公司生产的一款高速CAN(Controller Area Network)收发器芯片的手册。这款芯片专为汽车行业的高速CAN应用设计,能够提供微控制器与物理两线CAN总线之间的接口。TJA1145T具备极低的待机和睡眠模式功耗,并支持ISO11898-6:2013规定的CAN部分网络功能,即选择性唤醒功能。此外,TJA1145T/FD和TJA1145TK/FD变体还集成了特定的CAN FD(Flexible Data-rate)部分网络功能,称为'FD-passive',能够在等待有效唤醒帧时忽略CAN FD帧,这使得支持CAN FD和标准CAN 2.0通信的网络得以优化,允许不需要发送CAN FD消息的常规CAN控制器保持在部分网络睡眠模式下,从而实现节能和高效的网络管理。"
本文档详细介绍了TJA1145T高速CAN收发器的特性、功能和应用。首先,TJA1145T芯片的核心功能在于它为微控制器与CAN总线间提供了差分传输和接收能力,这是实现CAN通信的基础。其设计适用于汽车行业的高速通信需求,确保了数据的可靠传输。
在功耗方面,TJA1145T具备Standby和Sleep两种低功耗模式,这对于汽车电子系统来说至关重要,因为它们需要在不牺牲性能的同时降低系统能耗。通过支持ISO11898-6:2013标准的CAN部分网络功能,TJA1145T能够根据预设的CAN_ID位进行选择性唤醒,进一步减少了不必要的电源消耗。
特别地,TJA1145T/FD和TJA1145TK/FD版本引入了“FD-passive”功能,这是对CAN FD协议的扩展。这种功能允许芯片在睡眠或待机状态下忽略CAN FD帧,只响应特定的唤醒帧,这样,不支持CAN FD的控制器可以继续保持低功耗状态,而不会因接收不相关的CAN FD帧而被唤醒。这种设计考虑到了兼容性问题,使得混合使用CAN FD和标准CAN 2.0的网络能够更加灵活和高效地运行。
手册中可能还涵盖了TJA1145T的电气特性、引脚配置、操作模式、错误处理、以及与微控制器的接口设置等相关内容,为开发者提供了全面的技术指导,帮助他们正确、有效地利用这款芯片进行CAN网络的设计和实施。对于涉及汽车电子、车载网络或工业自动化领域的工程师而言,这份手册是理解和使用TJA1145T的关键参考资料。

TJA1145 All information provided in this document is subject to legal disclaimers. © NXP Semiconductors N.V. 2016. All rights reserved.
Product data sheet Rev. 3 — 8 June 2016 10 of 56
NXP Semiconductors
TJA1145
High-speed CAN transceiver for partial networking
7.2 High-speed CAN transceiver
The integrated high-speed CAN transceiver is designed for active communication at bit
rates up to 1 Mbit/s, providing differential transmit and receive capability to a CAN protocol
controller. The transceiver is ISO 11898-2:2003, ISO 11898-5:2007 and
ISO 11898-6:2013 compliant (defining high-speed CAN with selective wake-up
functionality and autonomous bus biasing). The CAN transmitter is supplied via pin VCC
while the CAN receiver is supplied via pin BAT. The TJA1145 includes additional timing
parameters to ensure reliable communication in fast phase at data rates up to 2 Mbit/s, as
used in CAN FD networks.
The CAN transceiver supports autonomous CAN biasing as defined in ISO 11898-6:2013,
which helps to minimize RF emissions. CANH and CANL are always biased to 2.5 V when
the transceiver is in Active or Listen-only modes (CMC = 01/10/11).
Autonomous biasing is active in CAN Offline mode - to 2.5 V if there is activity on the bus
(CAN Offline Bias mode) and to GND if there is no activity on the bus for t > t
to(silence)
(CAN Offline mode).
This is useful when the node is disabled due to a malfunction in the microcontroller or
when CAN partial networking is enabled. The TJA1145 ensures that the CAN bus is
correctly biased to avoid disturbances to communications. The autonomous CAN bias
voltage is derived directly from V
BAT
.
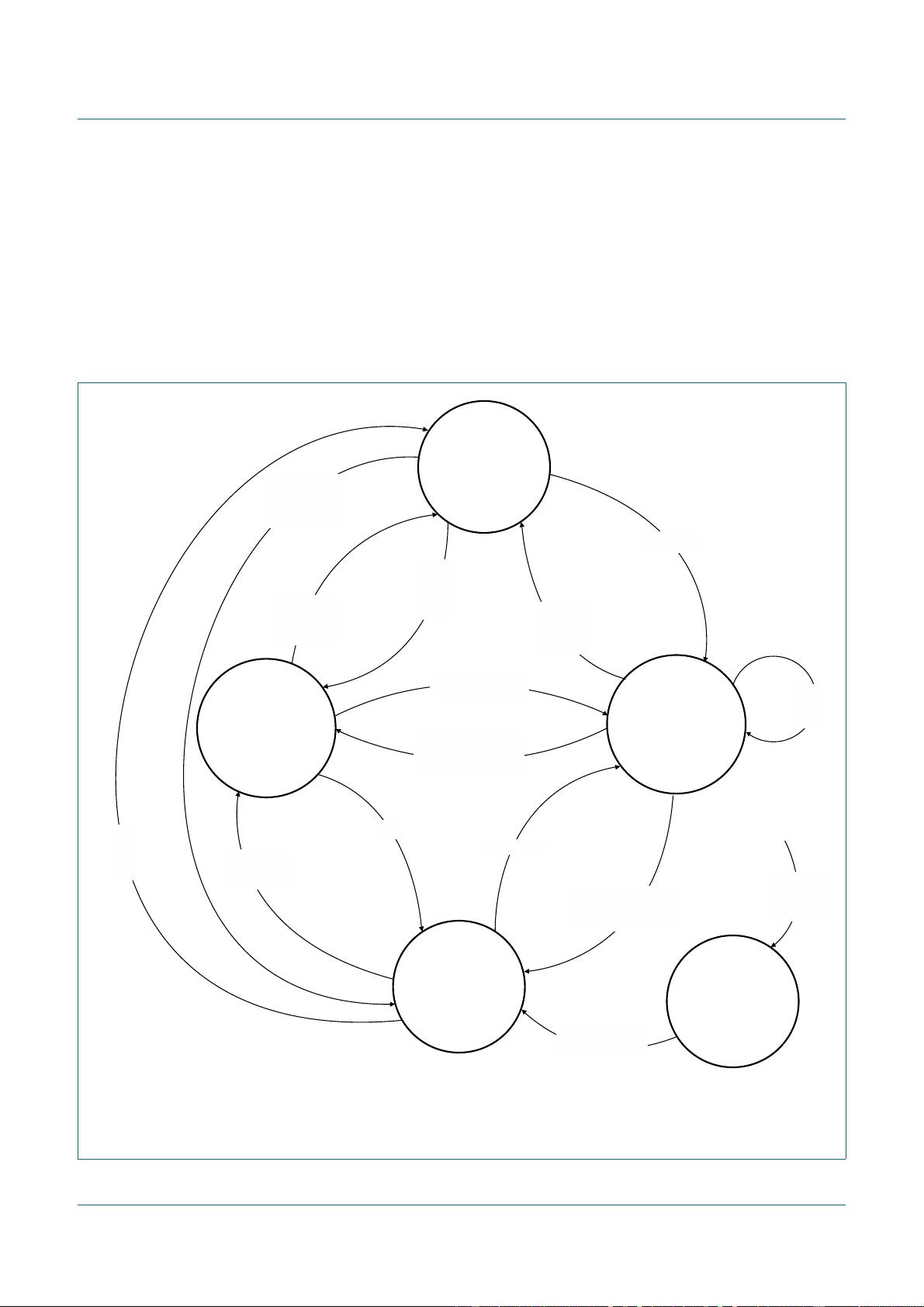
7.2.1 CAN operating modes
The integrated CAN transceiver supports four operating modes: Active, Listen-only,
Offline and Offline Bias (see Figure 5
). The CAN transceiver operating mode depends on
the TJA1145 operating mode and on the setting of bits CMC in the CAN control register
(Table 7
).
When the TJA1145 is in Normal mode, the CAN transceiver operating mode (Offline,
Active or Listen-only) can be selected via bits CMC in the CAN control register (Table 7
).
When the TJA1145 is in Standby or Sleep modes, the transceiver is forced to Offline or
Offline Bias mode (depending on bus activity).
7.2.1.1 CAN Active mode
In CAN Active mode, the transceiver can transmit and receive data via CANH and CANL.
The differential receiver converts the analog data on the bus lines into digital data, which
is output on pin RXD. The transmitter converts digital data generated by the CAN
controller (input on pin TXD) into analog signals suitable for transmission over the CANH
and CANL bus lines.
CAN Active mode is selected when CMC = 01 or 10. When CMC = 01, V
CC
undervoltage
detection is enabled and the transceiver will switch to CAN Offline or CAN Offline Bias
mode when the voltage on V
CC
drops below the 90 % threshold. When CMC = 10, V
CC
undervoltage detection is disabled. The transmitter will remain active until the TJA1145 is
forced into Sleep mode by the V
CC
undervoltage event; the transceiver will then switch to
CAN Offline or CAN Offline Bias mode.
The CAN transceiver is in Active mode when:
• the TJA1145 is in Normal mode (MC = 111) and the CAN transceiver has been
enabled by setting bits CMC in the CAN control register to 01 or 10 (see Table 7
) and:
剩余55页未读,继续阅读
2661 浏览量
517 浏览量
861 浏览量
1808 浏览量
863 浏览量
1197 浏览量
432 浏览量
230 浏览量
157 浏览量

quanyi_09
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Potlatch_Server:看一场你无法独享的日落; 一幅让你叹为观止的风景,一幅触动你个人的画面? 然后拍摄一张照片,添加一些文字或诗歌来传达您的想法,然后使用 Potlatch 将其提供给其他人。 你的想法和图像能触动世界各地的人们吗? 谁是最伟大的礼物赠送者? 用 Potlatch 找出答案。 (potlatch这个词来自奇努克的行话,意思是“赠送”或“礼物”,是加拿大和美国太平洋西北海岸原住民举行的送礼盛宴)
- 可爱小老虎图标下载
- 虚拟舞蹈委员会
- applifecycle-backend-e2e:应用程序生命周期后端的e2e测试库
- AP-Elektronica-ICT:AP Hogeschool Antwerp的电子信息通信技术课程的公共GitHub页面
- USBWriter-1.3的源码
- AdBlockID-Plus_realodix:AdBlockID Plus测试
- 初级java笔试题-english-dictionary:英语词典
- vue-height-tween-transition:补间过渡项目的父项的高度
- 搞怪松鼠图标下载
- minimal-app:最小的Phonegap应用
- libmp3lame.a(3.100).zip
- 多彩变色龙图标下载
- 实现可以扫描生成二维码的功能
- LittleProjects:Coursera的Little Projects
- SingleInstanceApp:WPF单实例应用程序
