
北京理工大学珠海学院 2020 届本科生毕业毕业设计
4
2 双足仿生机器人总体方案设计与动力选择
2.1 双足仿生机器人的工作原理
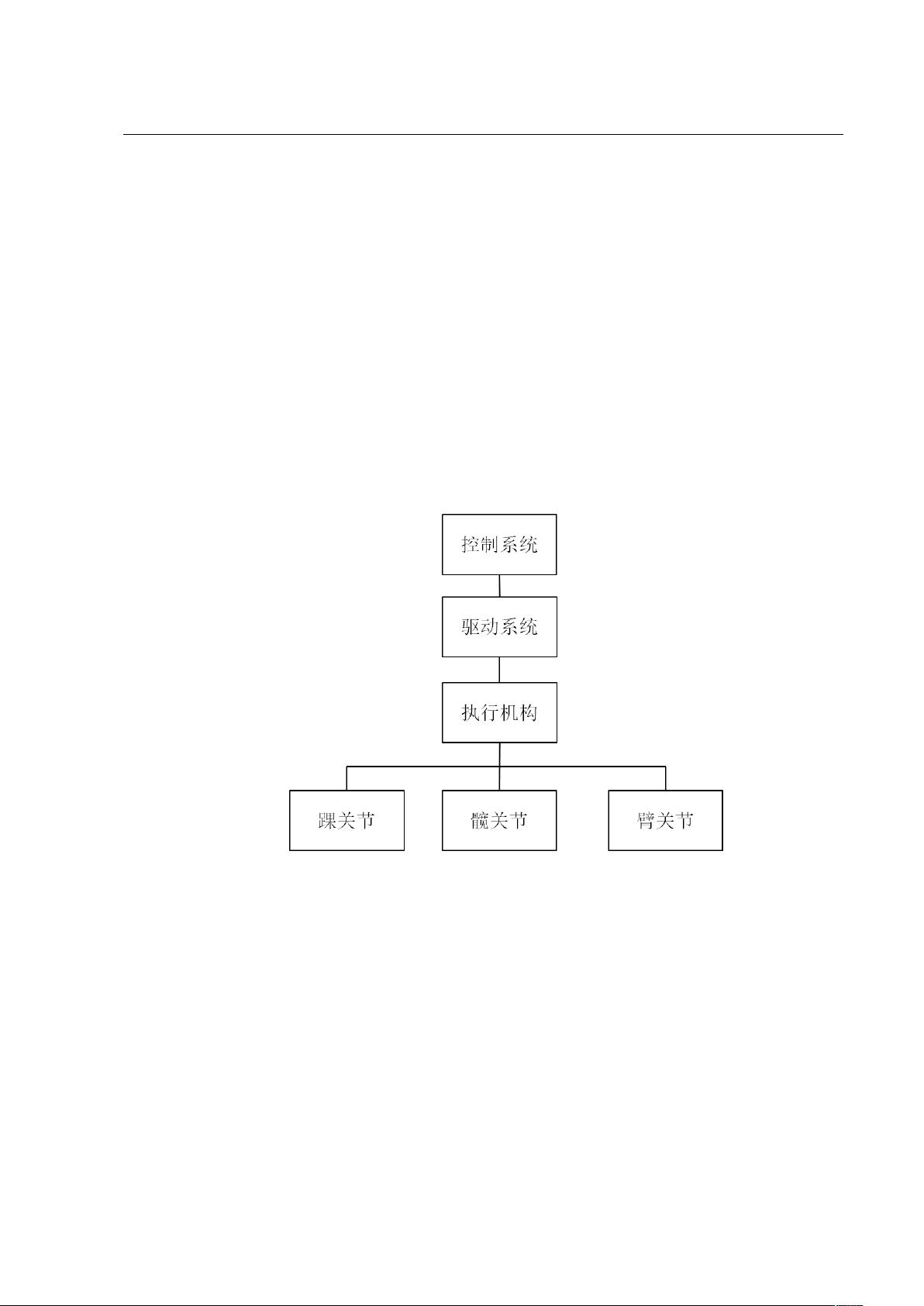
经过几个月的研究学习,我对双足仿生机器人的运动原理有了一定的理解。我认为
双足仿生机器人的运动是由电机来带动构件运动的,而电机的驱动则是由电源来完成,
若要实现对双足仿生机器人的控制,则需要电机控制芯片,通过电机控制芯片对电机的
转动控制,最终实现了对双足仿生机器人步伐的大小、快慢、幅度的控制。本设计就是
依据此原理来实现的。
原理如图 2.1 所示
图 2.1 双足仿生机器人的工作原理框图
2.2 结构设计
2.2.1 设计目标
根据人类腿部结构和所需实现功能,设计出一个 8 自由度双足仿生机器人的机械结
构。其能通过在双足仿生机器人身上安装电池、控制板、超声波传感器以及倾角传感器
来控制电机,从而完成步行、踏步、鞠躬、翻跟头以及超声波避障功能。
剩余38页未读,继续阅读















