Apollo Cyber RT:高性能自动驾驶框架解析
"Apollo Cyber RT操作手册包含基础知识加实践"
Apollo Cyber RT是百度为自动驾驶研发的开源、高性能运行框架,专门针对自动驾驶场景的需求进行了优化,强调高并发、低延迟和高吞吐量。与传统的ROS(Robot Operating System)相比,Apollo Cyber RT在性能上具有显著优势,尤其是在处理自动驾驶所面临的复杂计算任务时。
Apollo Cyber RT的核心是组件化的设计理念。它将Localization(定位)、Perception(感知)、Prediction(预测)、Planning(规划)和Control(控制)等关键功能模块作为独立的组件,通过调度程序Mainboard进行加载和运行。这种组件化结构使得算法模块的开发和集成更为便捷,每个组件都代表了特定的自动驾驶功能。
选择Apollo Cyber RT而非ROS的原因在于,ROS的性能不足以满足自动驾驶对实时性、并发性和吞吐能力的高要求。Apollo则通过通信功能优化、去中心化的网络拓扑以及数据兼容性扩展来克服这些问题,为自动驾驶系统提供更高效、稳定的基础。
使用Apollo Cyber RT能够带来以下优势:
1. 加速开发:提供清晰的任务接口和数据融合功能,开发人员可以通过API快速处理数据。此外,CyberRT还提供了一系列开发工具和多种传感器驱动程序,促进了生态系统的丰富和发展。
2. 简化部署:高效的自适应消息通信机制使得不同模块之间的通信更为流畅,资源意识的用户级调度程序可以动态分配计算资源,确保优先级高的任务得到及时处理。
3. 可移植性和依赖管理:依赖较少,更容易在不同的硬件平台上部署和运行。
在部署Apollo Cyber RT之前,开发者需要了解Docker和Bazel。Docker是一个应用容器引擎,能够将应用及其依赖打包成可移植的镜像,方便在各种环境中运行,解决了开发环境配置的复杂性和兼容性问题。Bazel是Google的构建工具,用于自动化构建、测试和部署软件项目,确保了构建过程的一致性和可靠性。
安装Apollo Cyber RT的过程中,Docker和Bazel的使用至关重要。Docker帮助开发者创建和分享容器化环境,而Bazel则确保了代码构建和测试的高效执行。通过这两者的结合,可以简化Apollo Cyber RT的安装和维护,加速自动驾驶软件的开发和部署流程。
5.Cyber RT
安装
过程:
下载源码;
执行脚本启动
docker
容器
进入
dockerrongqi
构建
1.
下载源码:克隆
Apollo
源码仓库:
1. git clone https://github.com/ApolloAuto/apollo.git
或者使用
Gitee
代替:
1. git clone https://gitee.com/ApolloAuto/apollo.git
2.
启动
Apollo Docker
开发容器
进入到
Apollo
源码根目录,执行以下命令以启动
Apollo Docker
:
1. ./docker/scripts/dev_start.sh
如果只是使用
Cyber RT
可以执行:
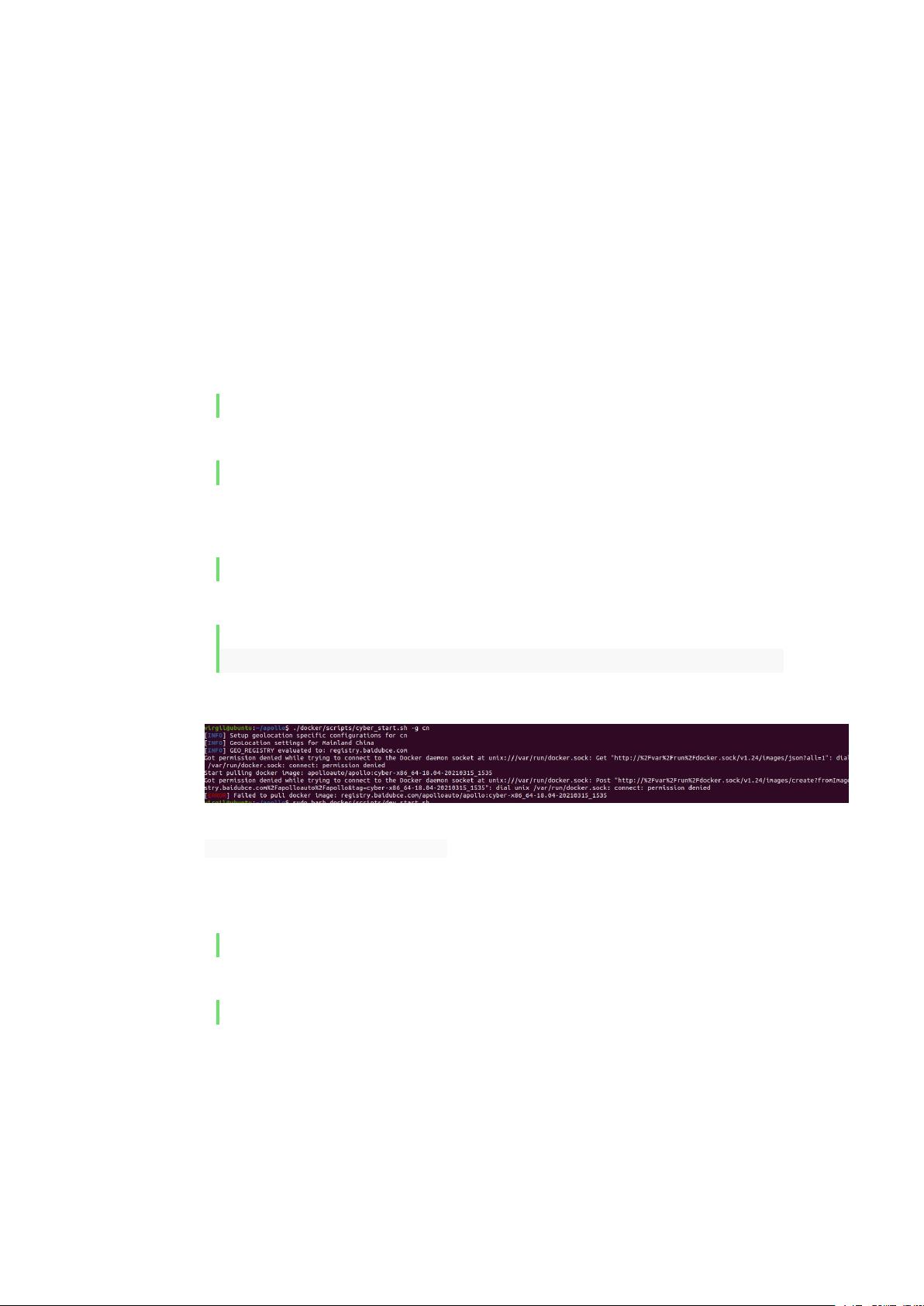
1. ./docker/scripts/cyber_start.sh
2. ./docker/scripts/cyber_start.sh -g cn
出现问题
原因:需要添加权限
sudo bash docker/scripts/dev_start.sh
3.
进入
Apollo Docker
开发容器
启动
Apollo Docker
开发容器后,执行下述命令进入容器:
1. ./docker/scripts/dev_into.sh
如果只是使用
Cyber RT
可以执行:
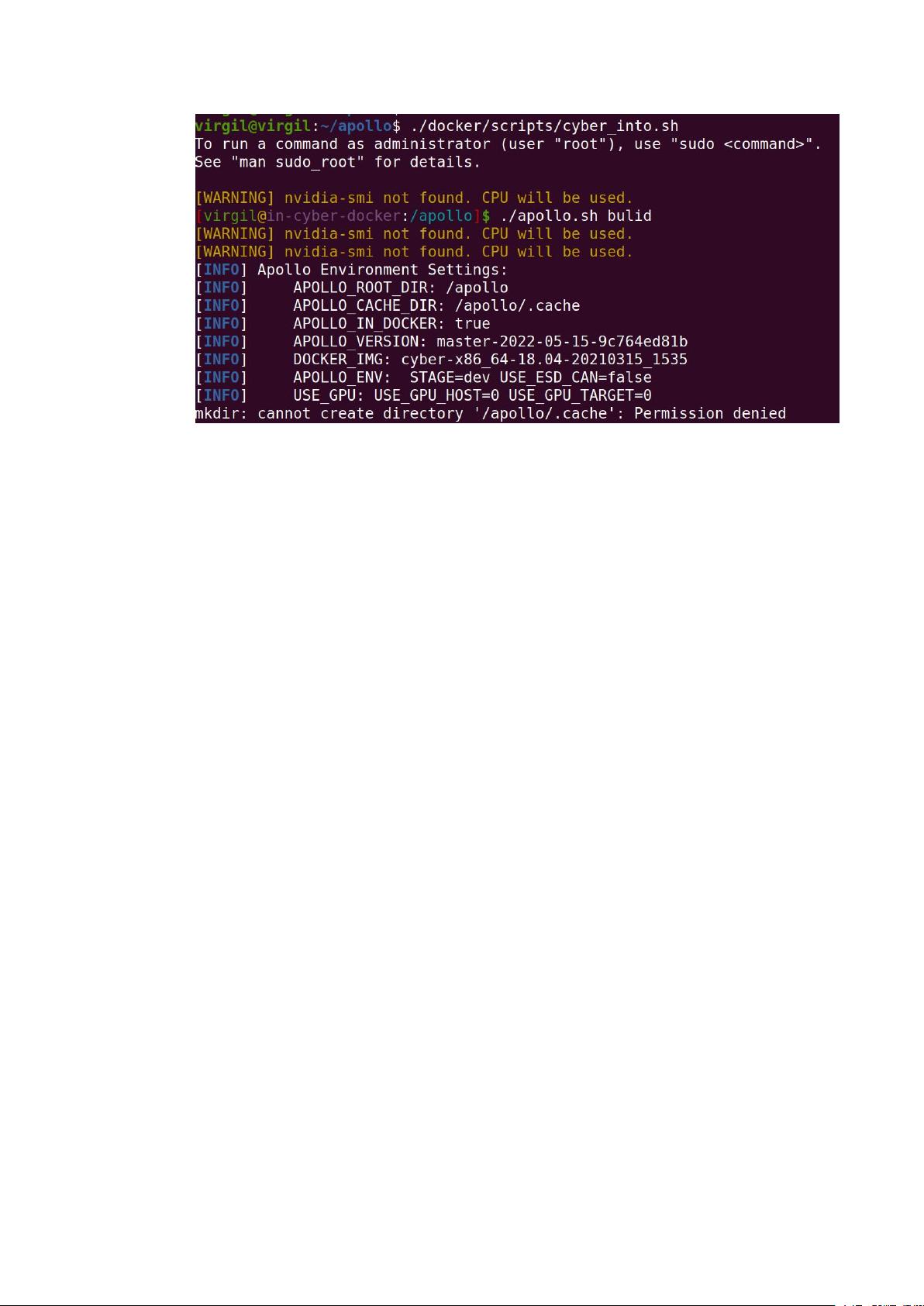
1. ./docker/scripts/cyber_into.sh
注意:进入容器后,终端信息改变,后续的操作实在容器内展开
4.
在容器中构建
Apollo
进入
Apollo Docker
开发容器后,在容器终端执行以下命令构建
Apollo
:
./apollo.sh build //
编译
apollo
下的所有框架
./apollo.sh build cyber //
单独编译
cyber
剩余31页未读,继续阅读
2022-04-17 上传
2024-04-02 上传
点击了解资源详情
2023-09-07 上传
2022-12-08 上传
2021-05-29 上传
2022-09-28 上传
点击了解资源详情
点击了解资源详情

有故事的于同学
- 粉丝: 5
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- ChessLib.Py:C-lib Python3扩展,可进行有效的国际象棋绘图
- 个人网站HTML网页模板是一款咖啡色背景的个人简介商务网站模板。.zip
- netlify-dynamic-dns:Netlify 托管 DNS 的动态 DNS 客户端
- TPB IMDB Pirate Bay Search Plugin-crx插件
- flaskSample:一个Python烧瓶项目,该项目使用Angular JS进行UI和客户端逻辑,并使用Python Flask作为提供初始页面URL的服务器引擎,并使用REST API进行客户端模型
- Python大学生基础笔记
- sana
- Stock Market Right-Click-crx插件
- product-quantization::upside-down_face:矢量量化算法的实现,Norm-Explicit Quantization的代码
- 行业分类-设备装置-一种节能型自吸泵式加油机及其节能控制方法.zip
- mid-autumn-shell:额,中秋写的一个简易的后台管理webshell
- gpgpu-rs:一个基于OpenCL的简单GPU计算库
- GraphQLSuiteCRM:GraphQL SuiteCRM-使用GraphQL与SuiteCRM集成
- Random Cognitive Bias-crx插件
- Week07A_29656
- 开发
