Apollo Cyber_RT:实时操作系统下的自动驾驶通信解决方案
需积分: 0 62 浏览量
更新于2024-06-28
1
收藏 1.74MB PDF 举报
Apollo Cyber-RT是Apollo自动驾驶平台中的一个重要组件,它专为满足自动驾驶任务的需求和提供实时响应而设计。在Apollo生态中,CyberRT位于用户空间,旨在解决实时操作系统(RTOS)上的任务调度、通信管理和数据融合问题,以替代传统的基于ROS1的通信模型。
在Apollo 3.5版本之前,系统依赖于Linux这样的通用分时多任务操作系统,并且通信机制存在局限,如静态分配内存、非阻塞调用以及进程内通信的需求。CyberRT的诞生旨在克服这些挑战,通过引入实时任务处理框架来优化性能和效率。其核心作用包括:
1. **实时性增强**:CyberRT支持任务调度(DAG)算法,确保自动驾驶任务按照预定的优先级和依赖关系执行,满足自动驾驶对实时性的严格要求。
2. **内存管理和协程**:它扩展了RTOS和时间片共享操作系统(TSOS)的功能,提供高效内存管理,避免频繁的动态内存分配,提高系统的稳定性和响应速度。
3. **数据融合**:通过Multi-in, Multi-out的设计,CyberRT能够同时接收和发送多个数据流,这对于自动驾驶中实时处理来自不同传感器的数据至关重要。
4. **通信机制创新**:CyberRT继承了eProsima FastRTPS的去中心化通信模型,支持QoS(服务质量),并利用进程内通信(例如,共享内存SHM)进行高效的消息传递,保持与RTPS协议的兼容性。此外,它还采用Protobuf作为设备间通讯媒介,简化了数据交换过程。
5. **无中间件设计**:为了降低复杂性,CyberRT采用了NoBroker架构,使得Reader和Writer可以直接交互,减少了数据传输的延迟,提高了数据传输的实时性。
图1展示了Apollo 7.0架构中CyberRT的定位,图2描绘了Cyber工作流程,图3和图4分别显示了RTOS集成和用户空间部署的方式。总体来说,CyberRT作为Apollo自动驾驶平台的关键组成部分,通过引入实时操作系统的特性,显著提升了系统的实时性和可靠性,推动了自动驾驶技术的发展。
CyberRT诞生背景
• History
• Apollo 3.5 : Real Time Framework
• Feature
1. 满足自动驾驶的任务需求和实时性
• 任务调度(DAG)
• 协程和内存管理 (RTOS/TSOS 扩展)
• 数据融合(Multi-in, Multi-out)
2. 继承Fast RTPS (eProsima Fast RTPS) :
• 去中心化通讯RTPS 通讯:QoS, Participant / Node / Reader / Writer / Service / Client
• 同主机通讯(进程内/见): 传输层利用共享内存SHM,传递消息指针,实现符合 RTPS 模型
• 设备间通讯媒介:Protobuf
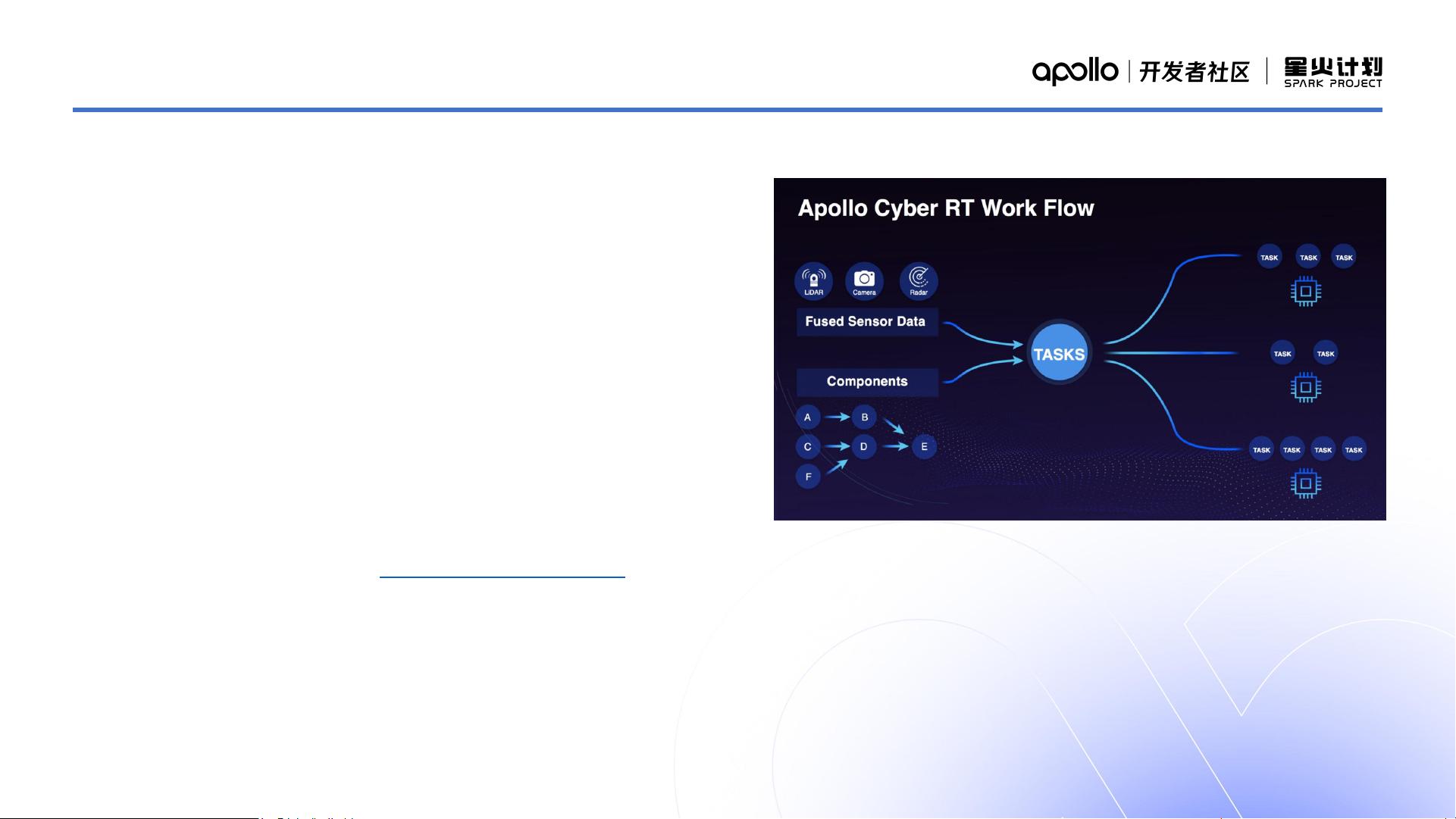
Fig 2: Cyber workflow [1]
剩余28页未读,继续阅读
2021-05-29 上传
2022-08-17 上传
2023-07-28 上传
2023-09-07 上传
2023-09-17 上传
2023-06-12 上传
2023-11-22 上传
2023-07-03 上传
2023-05-18 上传

Ponnyao
- 粉丝: 7978
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
