JGBFT1612A工业机器人实训平台技术详解
需积分: 5 169 浏览量
更新于2024-08-04
1
收藏 2.33MB DOC 举报
"工业机器人多功能实训平台JGBFT1612A,旨在提供一个集教学与实践于一体的教育解决方案,核心是关节型六轴串联工业机器人。实训平台围绕机器人设置了各种工艺应用模块,如搬运码垛、分拣、抛光打磨和装配,适合职业院校的教学与技能竞赛。平台集成离线编程技术,简化编程过程,提高精度,并具有模块化设计,允许自定义实训功能。工业机器人TR607具有3kg的额定手腕负载,720mm的最大工作半径,重复定位精度达±0.05mm,适合在0-40℃的环境中工作。"
这篇文档详细介绍了工业机器人多功能实训平台JGBFT1612A,它是基于一个关节型六轴串联工业机器人设计的,旨在为职业教育提供一个贴近实际应用的实训环境。实训平台的特色在于其多样化的工作站,包括搬运码垛、分拣、抛光打磨和装配等实训模块,这使得学习者能够全面了解和掌握工业机器人的应用。此外,它还采用了离线编程技术,配合三维模型资源,简化编程流程,确保轨迹复现的精度,并防止碰撞干涉。
该平台由多个部分组成,包括机器人模块、实训模块和控制模块。模块化设计意味着用户可以根据需要自行选择实训功能,涵盖了工业机器人基础认知、操作、轨迹操纵以及示教编程等多个方面。工业机器人TR607具有六个自由度,关节速度和转矩范围广泛,适合快速精确地执行各种任务。其轻巧的设计和内置线缆使其在小型单元组装、上下料和分拣等工作中表现出色。
实训平台的技术参数表明,该机器人手腕负载最大可达5kg,最大工作半径720mm,瞬间容许最大转矩分别为J5的35Nm和J6的24Nm。重复定位精度达到±0.05mm,确保了高精度的作业。此外,工作温度范围为0-40℃,确保了机器人在常规室温环境下的稳定运行。
这个实训平台是一个全面且灵活的教育工具,它不仅满足了职业教育的需求,也适应了职业技能竞赛的要求,为培养工业机器人领域的专业人才提供了有力的支持。
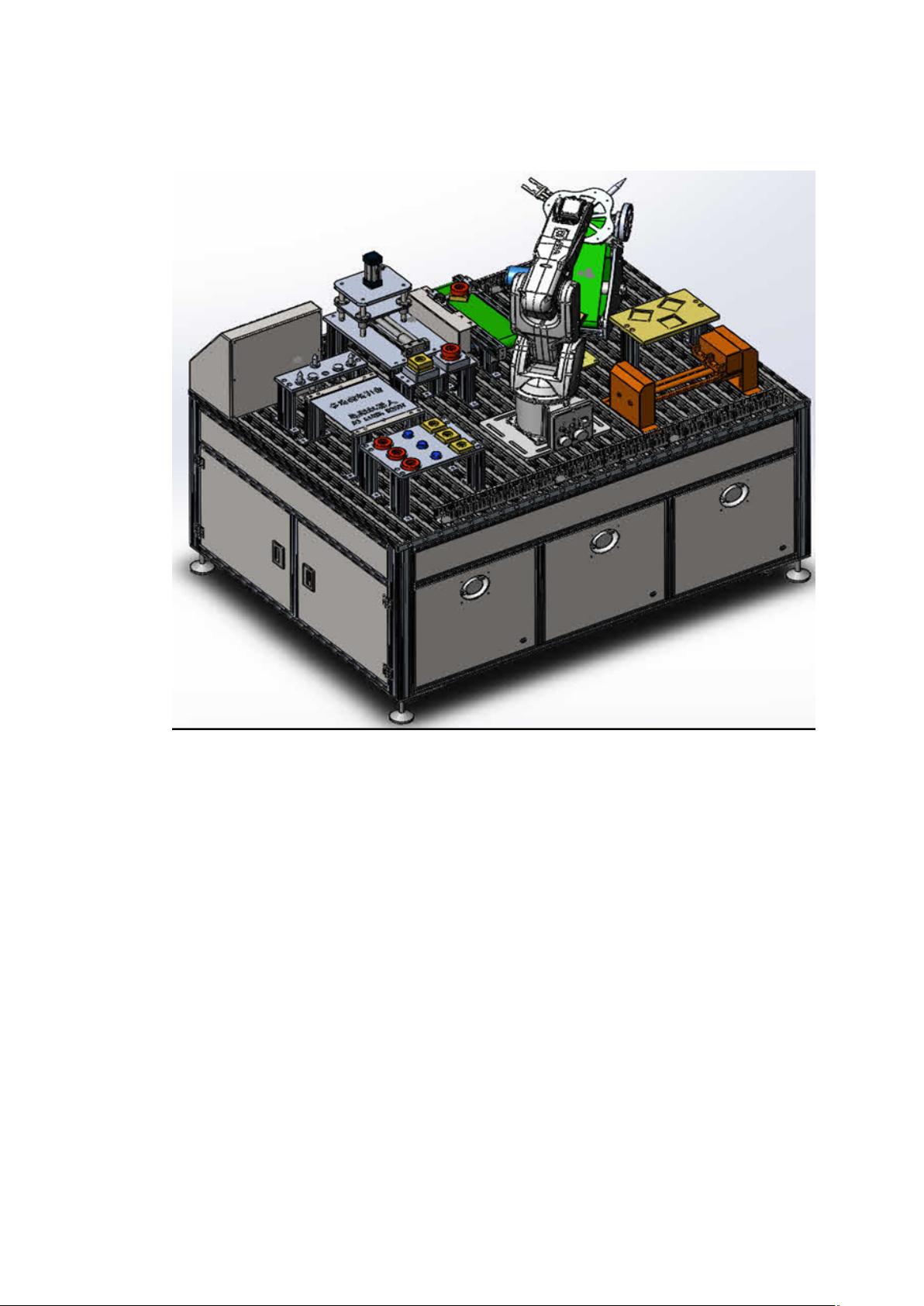
图 a
工作站深度集成了离线编程技术,软件中不仅包含了与硬件平台的相符三维
模型资源,还大大简化了涂胶及搬运码垛工艺实现的编程应用过程、提高轨迹复
现精度、避免发生碰撞干涉。
2. 产品组成
1.工业机器人 1 台;
2.完成产品输送、分拣、码垛,产品轨迹模拟、TCP 校点等工作;
3.组成:机器人模块、实训模块、控制模块等;
4.平台采用模块化设计,实训功能可自主搭配,能够完成工业机器人认知与操作,运行轨迹
操纵,程序数据及设定等示教编程。
图 a 多功能实训工作站
剩余11页未读,继续阅读
2021-09-16 上传
2021-09-24 上传
2023-05-25 上传
2023-05-27 上传
2023-06-09 上传
2023-05-19 上传
2023-06-28 上传
2023-10-12 上传
2023-02-06 上传

www19850910com
- 粉丝: 8
- 资源: 298
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
