"树莓派智能避障小车设计与实现"
下载需积分: 34 | DOCX格式 | 6.61MB |
更新于2024-01-14
| 79 浏览量 | 举报
随着科学技术的飞速发展,各种搭载有避障系统的家用或商用产品逐渐发展起来,在地质勘探、抢险救援、快递投送、智能分拣等领域都得到普遍应用。本文设计了一种基于树莓派的智能避障小车。该设计采用树莓派 4B 作为主控单元,使用 Python 语言编程,通过拓展板连接电机驱动模块、红外避障模块、四路循迹模块、摄像头模块以及双舵机云台。当该小车启动时,四路寻迹模块开始检测预设路径,红外避障模块检测路径上的障碍物,将检测到的信号发送给树莓派主控单元处理,控制小车的运动状态,同时用户通过网页端监视小车前方路况,为人工介入操作提供参考。经测试,该小车结合网页端的实时控制延迟较低,避障准确率高,能很好地完成循迹任务,具有一定的应用和参考价值。
关键词:智能小车;树莓派 4B;红外避障模块;四路寻迹模块
Abstract
With the rapid development of science and technology, a variety of household or commercial products equipped with obstacle avoidance systems are gradually being developed and widely used in fields such as geological exploration, emergency rescue, express delivery, and intelligent sorting. This article designs an intelligent obstacle avoidance car based on Raspberry Pi. The design uses Raspberry Pi 4B as the main control unit, programmed in Python, and connects with motor drive modules, infrared obstacle avoidance modules, four-way track modules, camera modules, and a dual servo gimbal through expansion boards. When the car is started, the four-way track module starts detecting the preset path, and the infrared obstacle avoidance module detects obstacles on the path, sending the detected signals to the Raspberry Pi main control unit for processing to control the car's motion state. At the same time, the user monitors the road conditions ahead of the car through a web interface, providing a reference for manual intervention. Through testing, the car combined with the web interface has low real-time control latency, high obstacle avoidance accuracy, and can successfully complete track tasks, thus having certain application and reference value.
Keywords: intelligent car; Raspberry Pi 4B; infrared obstacle avoidance module; four-way track module.
4
摄
像
头
模
块
2 系统的设计框架
本章节主要给出了智能车的硬件结构,分析各个模块的构成和实现原理,以
及硬件的连接方式。
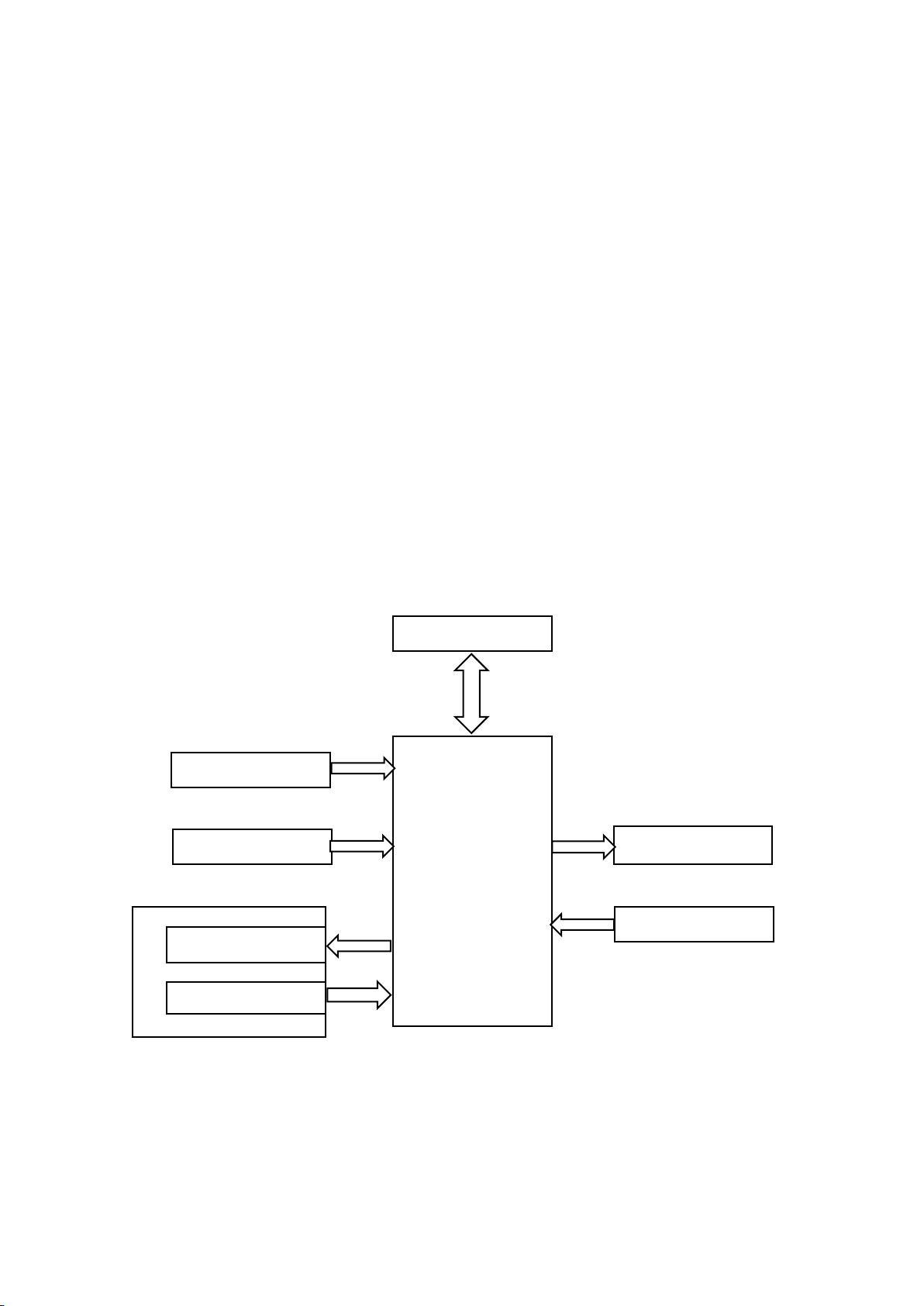
2.1 系统设计框图
基于树莓派的智能避障小车架构如图 2-1 所示,主要包括 Web 控制端、摄
像头模块(双舵机云台和 CSI 摄像头)、四路循迹模块、红外避障模块、电源模
块、电机驱动模块、树莓派 4B 主控单元。其中执行路况检测的模块由四路循迹
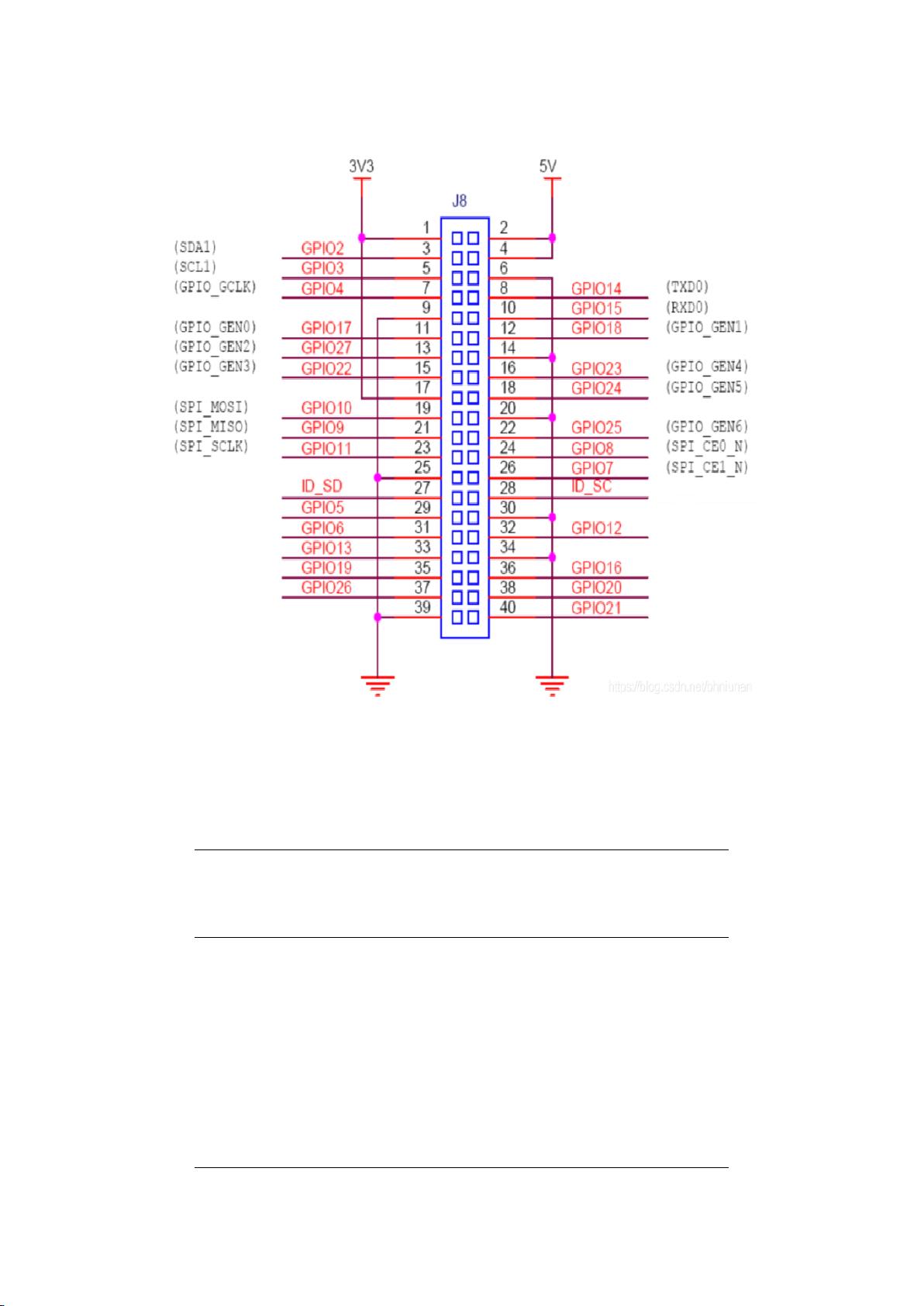
和红外避障两个模块组成,使用 L298N 作为小车的电机驱动板,连接四个电机
和树莓派 GPIO 引脚,通过控制 L298N 的 6 个 GPIO 引脚,从而控制四轮的差速,
达到小车运动状态的改变。为了调整小车的监控范围,在摄像头部分安装了一个
双舵机二自由度云台。小车与小车硬件连接方式紧密,其整体架构的亮点在于系
统功能级联性较强。
图 2-1 总体设计框架
本设计各模块单元的功能如下。
(1)Web 控制端功能。用户控制小车并实时监控小车前方的路况。
树莓派 4B
主控单元
红外避障模块
电机驱动模块
四路寻迹模块
双舵机云台
CSI 摄像头
Web 控制端
电源模块

剩余51页未读,继续阅读
相关推荐

306 浏览量




大皇杨
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
