
Welding Technology
Vo
l.
38
No.1
Jan.2009
文章编号:
1002-025X(2009)01-0037-04
·焊接设备与材料.
37
机器人水下焊缝跟踪中双目立体视觉系统
肖心远,石永华,王国荣,杜健辉
(华南理工大学机械学院,广东广州
510641
)
摘要:根据机器人水下焊缝跟踪的要求,设计了一套双目立体视觉传感器。采用卤鸽灯辅助光源加复合滤光系统,较好地去除了噪声,
拍摄到较为清晰的焊缝困像。针对水下焊缝图像模糊、对比度低的特点,采用模糊增强图像处理技术,对
Pal
处理算法进行了改进,改
进算法中采用
OTSU
法选择最佳闽佳,提出了新的隶属皮函数。试验表明,该算法提高了图像处理的效率,提取的边缘比较精细,为
空间焊缝跟踪中焊缝识别及立体匹配奠定了基础。
关键词:水下焊缝跟踪;双目视觉;模糊增强;边缘检测
中图分类号:
T
G4
56.5;
TP2
42
文献标志码
B
。
前言
21
世纪是人类开发和利用海洋的时代,随着海
洋石油和天然气工业的发展,海洋管道工程日益向深
海挺进,发展水下自动焊接技术已刻不容缓。由于药
芯焊丝水下温法焊接的工作环境非常恶劣,在焊接过
程中存在着强烈的弧光、气泡、飞溅、电磁以及工件
表面污染等的干扰,因此,由
CCD
摄取的焊缝原始
图像中不可避免地含有各种形式的噪声[I]。因此,设
t
十一套水下视觉系统是保证获取焊缝图像,实现跟踪
的第一步。边缘检测技术是图像分析与处理的重要工
具,在双目视觉的特征匹配中,边缘元素常作为首选
的匹配特征
[2]
但由于水下图像的特殊性,采用传统
的结构特征或一般的灰度特征进行图像分析已不适
应,针对图像中物体的边界所具有的不确定性和模糊
性,
Pal
提出了一种图像边缘模糊增强算法,首次将
模糊集理论引人到图像分割算法中,能够有效地将目
标和背景分离开来
[3]
。因此,本文从硬件及软件两方
面对水下焊缝图像的获取及处理进行了研究,设计了
水下双目视觉系统,采用模糊增强图像处理算法对图
像质量进行了改善。
1
机器人焊缝跟踪系统
试验系统的硬件设备由机器人系统、水下双目视
收稿日期
2008-07-20
基金项目:国家自然科学基金资助项目
(50705030)
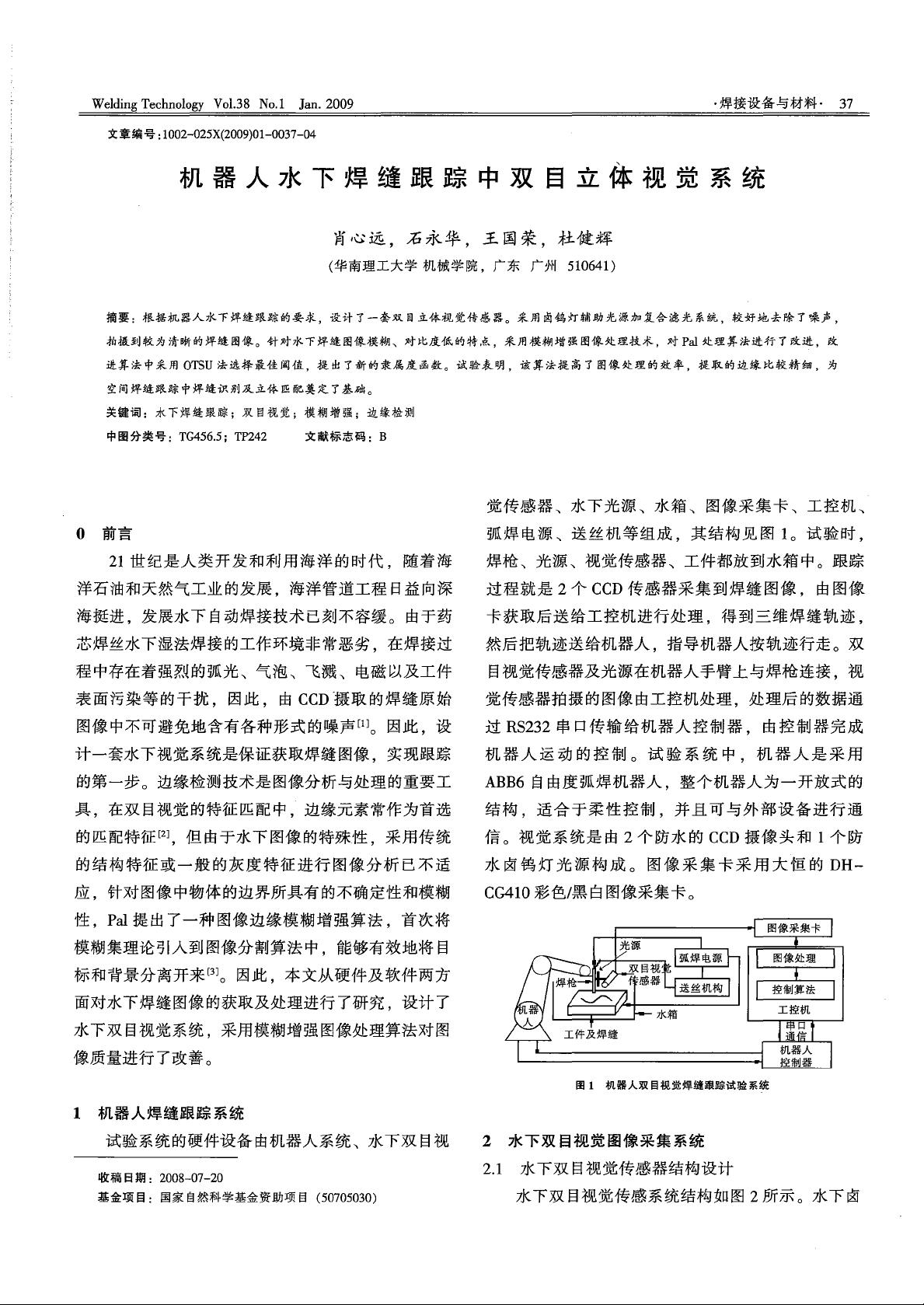
觉传感器、水下光源、水箱、图像采集卡、工控机、
弧焊电源、送丝机等组成,其结构见图
1
。试验时,
焊枪、光源、视觉传感器、工件都放到水箱中。跟踪
过程就是
2
个
CCD
传感器采集到焊缝图像,由图像
卡获取后送给工控机进行处理,得到三维焊缝轨迹,
然后把轨迹送给机器人,指导机器人按轨迹行走。双
目视觉传感器及光源在机器人手臂上与焊枪连接,视
觉传感器拍摄的图像由工控机处理,处理后的数据通
过
RS232
串口传输给机器人控制器,由控制器完成
机器人运动的控制。试验系统中,机器人是采用
ABB6
自由度弧焊机器人
整个机器人为一开放式的
结构,适合于柔性控制,并且可与外部设备进行通
信。视觉系统是由
2
个防水的
CCD
摄像头和
1
个防
水卤鸽灯光源构成。图像采集卡采用大恒的
DH
C
G4lO彩色/黑白图像采集卡。
图
1
机器人双目视觉焊缝跟踪试验系统
2
水下双目视觉图像采集系统
2.1
水下双目视觉传感器结构设计
水下双目视觉传感系统结构如图
2
所示。水下卤
下载后可阅读完整内容,剩余4页未读,立即下载

weixin_38745859
- 粉丝: 3
- 资源: 969
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


