




简易智能小车寻迹系统设计与实现
需积分: 9 156 浏览量
更新于2024-09-09
收藏 100KB DOC 举报
"该资源提供了一种循迹智能小车的开发代码,旨在使小车能够根据预设路径自主行驶。这种小车适用于比赛或教育项目,它基于普通玩具小车的机械结构,并通过光电对管和红外探测技术实现路面追踪。系统由检测、控制和驱动三个模块构成,通过红外探头(如ST168)接收反射光强度差异来识别黑白路面,进而调整小车行驶方向。"
详细说明:
在智能小车的开发中,循迹功能是关键,它涉及硬件和软件的综合运用。在这个项目中,小车的寻迹机制基于光电对管和比较器的组合,通过检测路面颜色变化来确定路径。具体来说,利用红外探测法,即小车向前发射红外光,白色路面会反射光,而黑色线条则会吸收光。ST168集成红外探头因其低成本、小体积、易用性及可靠性而被选作主要传感器。
ST168传感器由高发射功率的红外光二极管和高灵敏度光电晶体管构成,实现非接触式的检测。为了确保最佳检测效果,传感器通常安装在距离检测面10毫米处。在电路设计中,电阻R1用于限制发射二极管的电流,保证足够的发射功率,而R2则用于调整接收电路的电流和灵敏度,同时保护接收红外管。传感器的输出是模拟电压信号,通过比较器转换为数字信号,以便微控制器实时处理,从而控制电机的转动,调整小车的行驶方向。
在软件层面,开发者需要编写控制算法,根据比较器输出的信号,确定小车是否偏离轨道,并作出相应调整。这可能涉及到PID(比例积分微分)控制或其他类似的控制策略,以确保小车能精确地跟随轨迹行驶。
整体而言,这个循迹智能小车的开发涵盖了电子工程、自动化控制和编程等多个领域,是实践和学习嵌入式系统、传感器应用以及机器人控制的好例子。通过理解并实施这样的项目,不仅可以提升技能,还可以为参与类似竞赛或开发其他自动化设备打下坚实基础。
寻迹小车
在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。整个系统基于普通
玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟
踪路面黑色轨迹运行。
总体方案
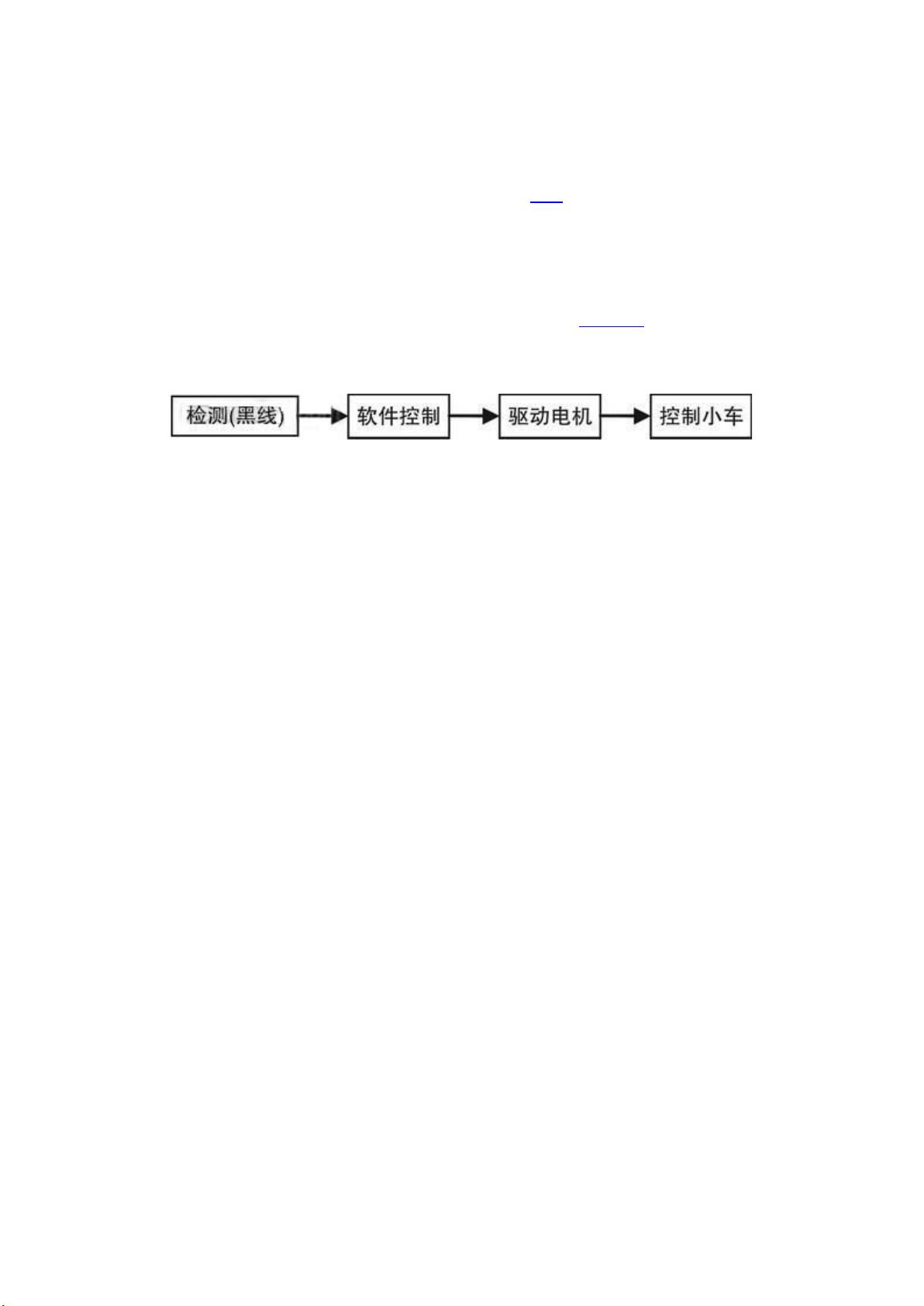
整个电路系统分为检测、控制、驱动三个模块。首先利用光电对管对路面信号进行检
测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片
驱动电机转动,从而控制整个小车的运动。系统方案方框图如图 1 所示。
图 1 智能小车寻迹系统框图
传感检测单元
小车循迹原理
该智能小车在画有黑线的白纸 “路面”上行驶,由于黑线和白纸对光线的反射系数不同,
可根据接收到的反射光的强弱来判断“道路”—黑线。笔者在该模块中利用了简单、应用也
比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。在小
车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被
装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信
号。
传感器的选择
市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,
也可以使用结构简单、工作性能可靠的集成式红外探头。ST 系列集成红外探头价格便宜、
体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了 ST168 反射传感器
作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图 2 所示:
下载后可阅读完整内容,剩余7页未读,立即下载
2261 浏览量
4198 浏览量
250 浏览量
2025-01-07 上传
2025-03-08 上传
2025-01-28 上传
2025-01-11 上传
2025-01-16 上传

Camile_hehe
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- Python实现A股多策略选股系统源代码
- 安卓进度条刻度滑动效果实现与代码学习
- 掌握C#实现的高级记事本功能
- 压缩包解压后展示客户BMS系统文件
- 掌握Android全局异常捕获技术与实践
- 电子商务后端开发深度剖析与实践
- 探索Snowball.mid源码工具的神秘面纱
- Linux DHCP实验性代码学习与实践指南
- 熊国毅力荐:飞雪桌面日历软件的便捷安装与使用体验
- 基于VB6.0开发的客户关系管理系统(CRM)
- 一键生成基础按钮的button-generator网站
- PHP源码开发:高清影视资源聚合站教程
- Android源码分享:圆形进度条及自定义实现
- 屏幕宽度自适应的视图换行布局技术
- 免费下载JSTL与Standard标签库jar包
- StrongOD插件深度解压缩指南






















