单片机精确控制:实现舵机微秒级转角的策略
需积分: 9 83 浏览量
更新于2024-07-28
1
收藏 698KB DOC 举报
在机器人机电控制系统中,舵机控制程序扮演着关键的角色,它直接影响系统的性能表现。舵机,作为一种常见的位置伺服驱动器,被广泛应用于微型机电系统(MEMS)和航模设备中,作为执行机构,其简单易控的特性使得单片机系统能轻松与其连接。舵机的工作原理基于脉宽调制(PWM),其控制信号由接收机输入,通过信号调制芯片产生直流偏置电压。内部的基准电路会产生一个周期为20ms、宽度为1.5ms的标准信号,该信号与直流偏置电压进行比较,形成电压差,这个电压差决定了电机的正反转。
舵机控制的核心在于PWM信号,通过调整占空比来改变舵机的角度。图1展示了舵机的基本控制要求,即脉宽的精确控制至关重要。然而,传统的PWM信号处理方法,如采用有源滤波后得到的直流电压,存在一些挑战。比如,需要稳定且频率较高的50Hz信号,这对运放器件的性能和电路设计提出较高要求,从体积和功耗角度考虑,可能不太适合小型的机载系统。此外,由于系统中的噪声干扰和电源波动,实现微小的控制电压变化(如5mV以上)可能导致舵机的抖动,难以满足高精度的控制需求。
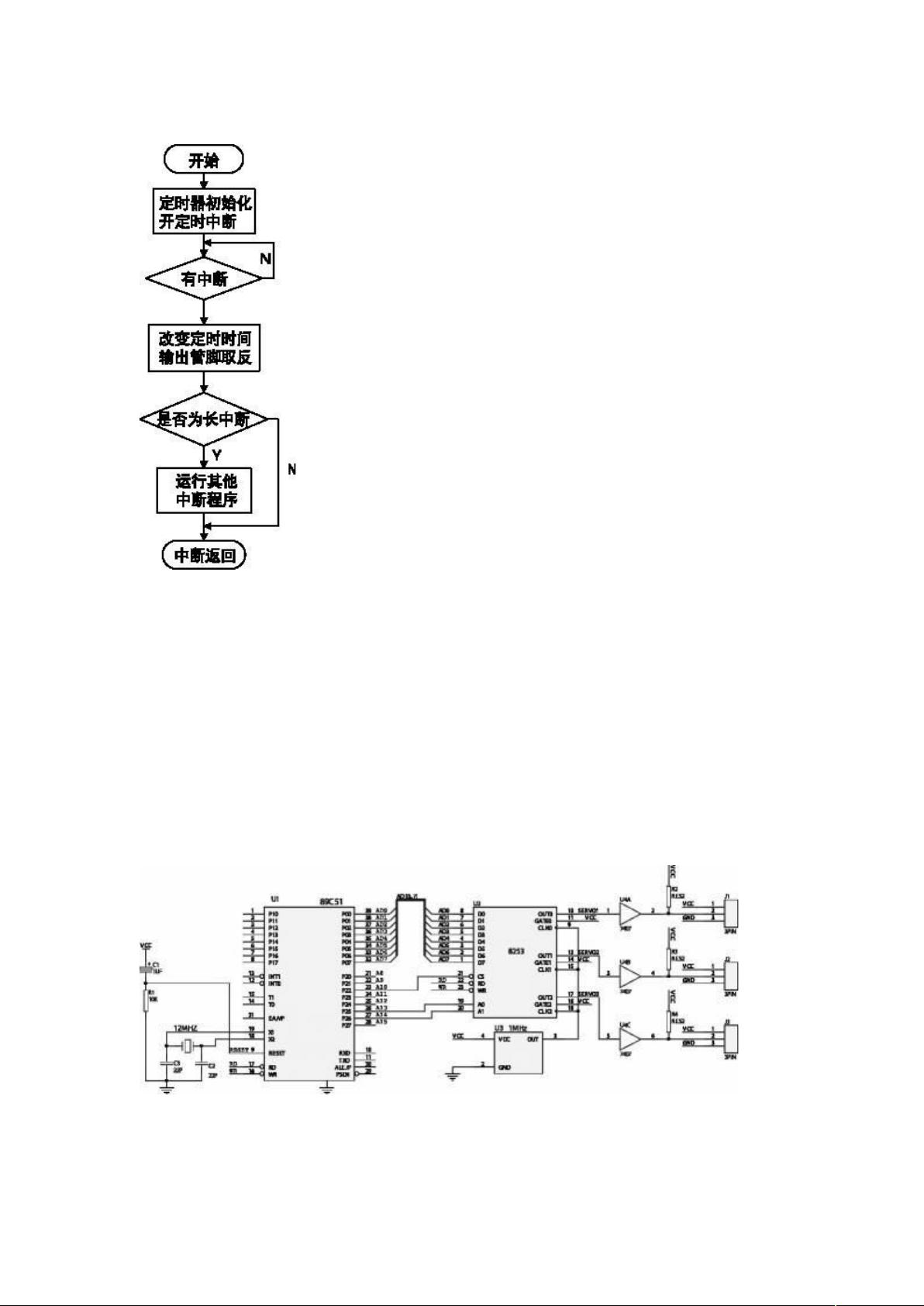
为了提高舵机转角精度,单片机被选为控制单元,它能够产生微秒级变化的PWM信号。单片机负责控制算法的实现,将算法结果转换成PWM信号输出,这种数字系统的特性使得它对外界干扰具有较好的抗扰性,提高了系统的可靠性和控制精度。在单片机的实现策略上,如果仅需控制一个舵机,可以利用定时器中断技术,例如,通过设定两个中断事件,一个20ms的周期分为两个部分,短定时中断用于正脉冲,长定时中断用于负脉冲,以此节省硬件资源和简化软件编程。
具体设计时,例如想要让舵机转向左极限角度,就需要确定正负脉冲的时长。例如,若正脉冲为2ms,则负脉冲为20ms减去2ms,即18ms。在初始阶段,控制口会发送高电平信号,接着设定定时器,按照预设的时间间隔产生相应的PWM信号,这样舵机就能准确地响应指令,实现所需的转角控制。
舵机控制程序是机器人和航模系统中的核心技术,通过对PWM信号的精确控制,确保了舵机在各种应用场景下的稳定性能和高精度操作。通过合理运用单片机和定时器中断等技术,我们可以设计出高效、可靠的舵机控制系统。

断发生后,在中断程序里
将控制口改为低电平,并
将中断时间改为 18ms,
再过 18ms 进入下一次定
时中断,再将控制口改为
高电平,并将定时器初值
改为 2ms,等待下次中断
到来,如此往复实现
PWM 信号输出到舵机。
用修改定时器中断初值的
方法巧妙形成了脉冲信号,
调整时间段的宽度便可使
伺服机灵活运动。
为保证软件在定时中断里采集其他信号,并且使发生 PWM 信号的程序不影
响中断程序的运行(如果这些程序所占用时间过长,有可能会发生中断程序还未
结束,下次中断又到来的后果),所以需要将采集信号的函数放在长定时中断过
程中执行,也就是说每经过两次中断执行一次这些程序,执行的周期还是
剩余25页未读,继续阅读
2011-11-22 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-05-27 上传

qq007game2009
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
