
KeMotion 应用及编程手册 KeTop 简介
6 KeMotion 应用及编程手册
© KEBA 2016
输出可以将用户选择的状态报告保存到插在控制器或者 KeTop 上的 USB 存储设备
上。
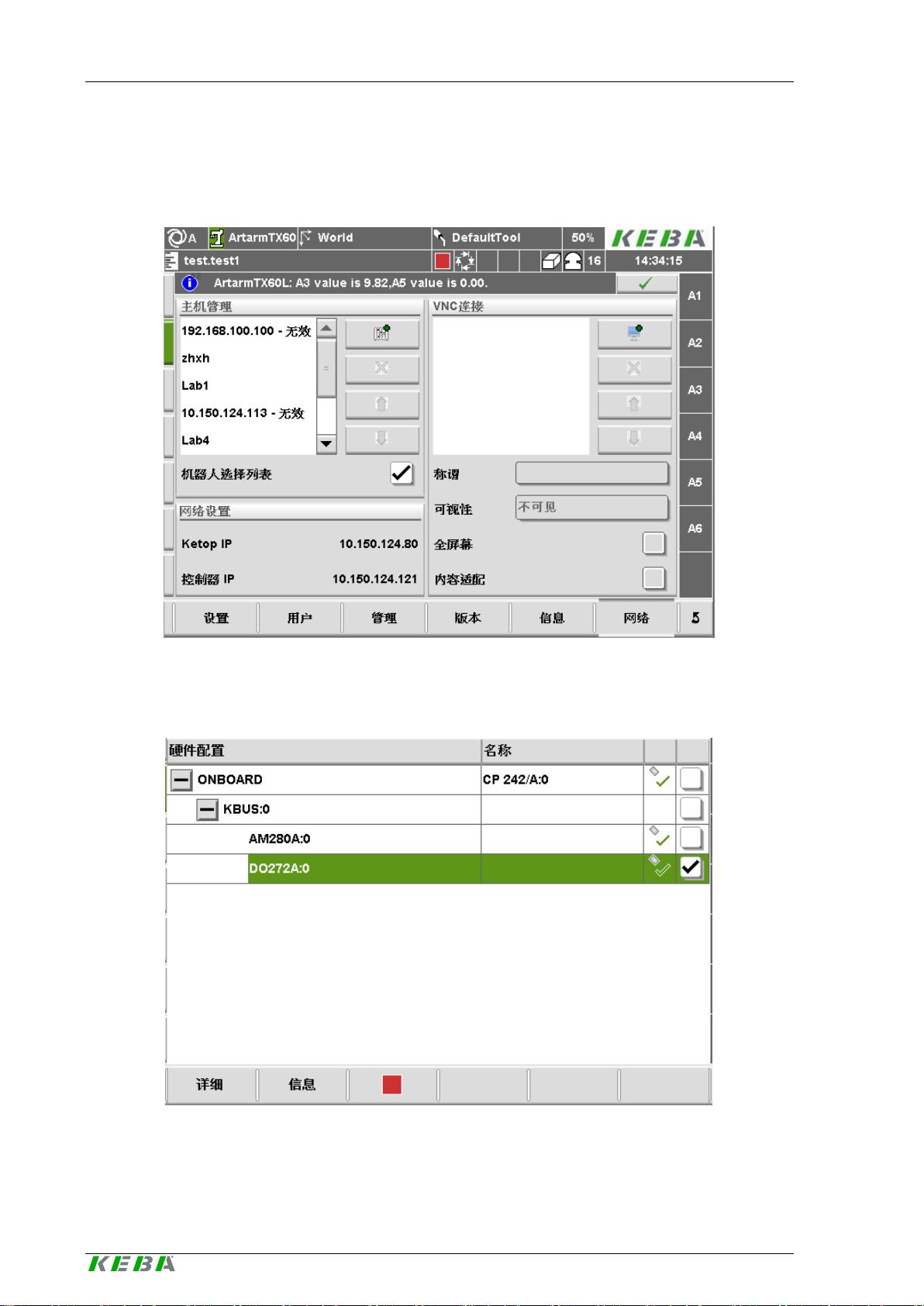
(6)网络界面
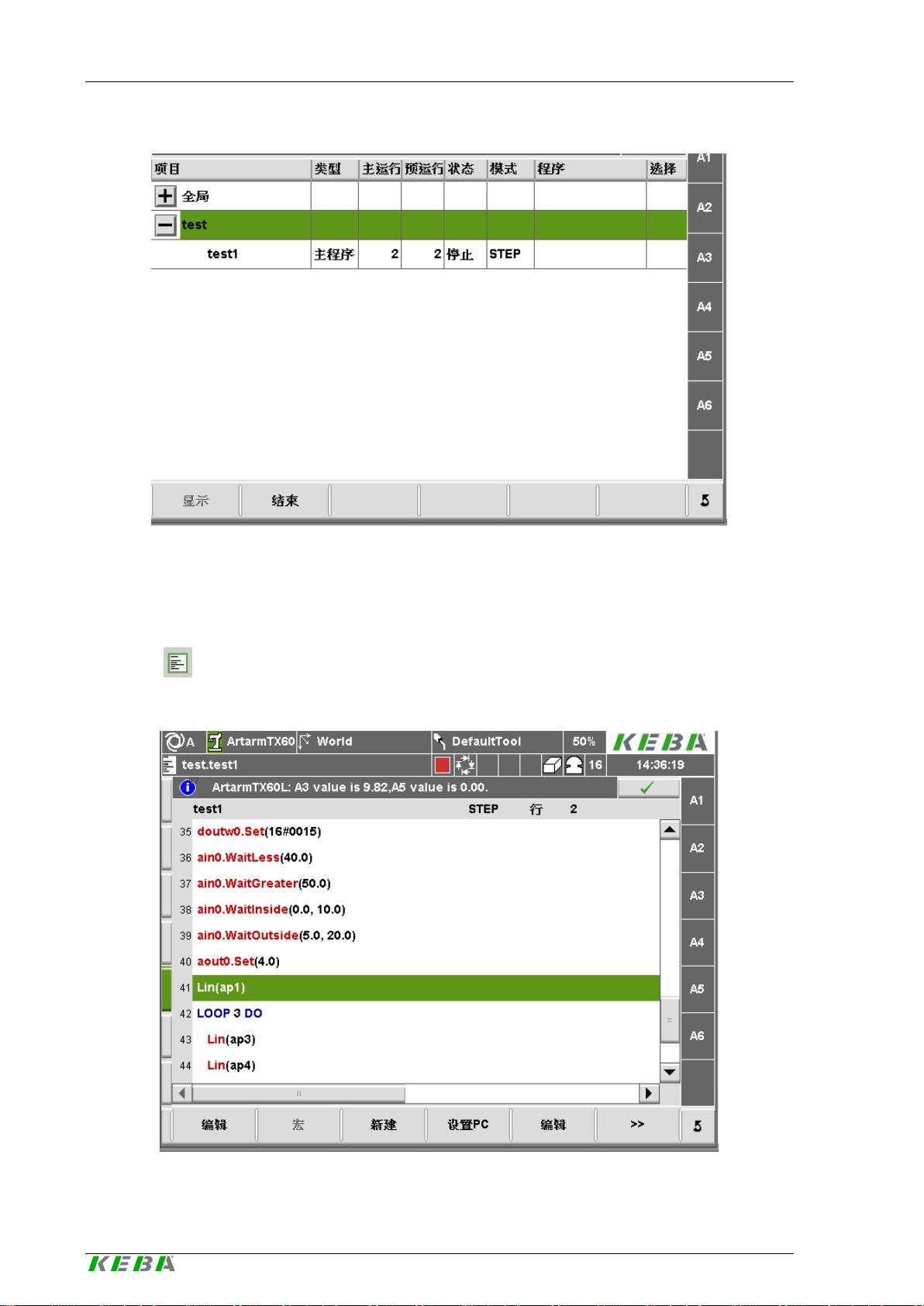
1.2.2 输入输出口监控
输入输出监测该界面显示系统的硬件配置,详细显示勾选的硬件的具体内容,而
信息则显示当前选中项的具体信息。
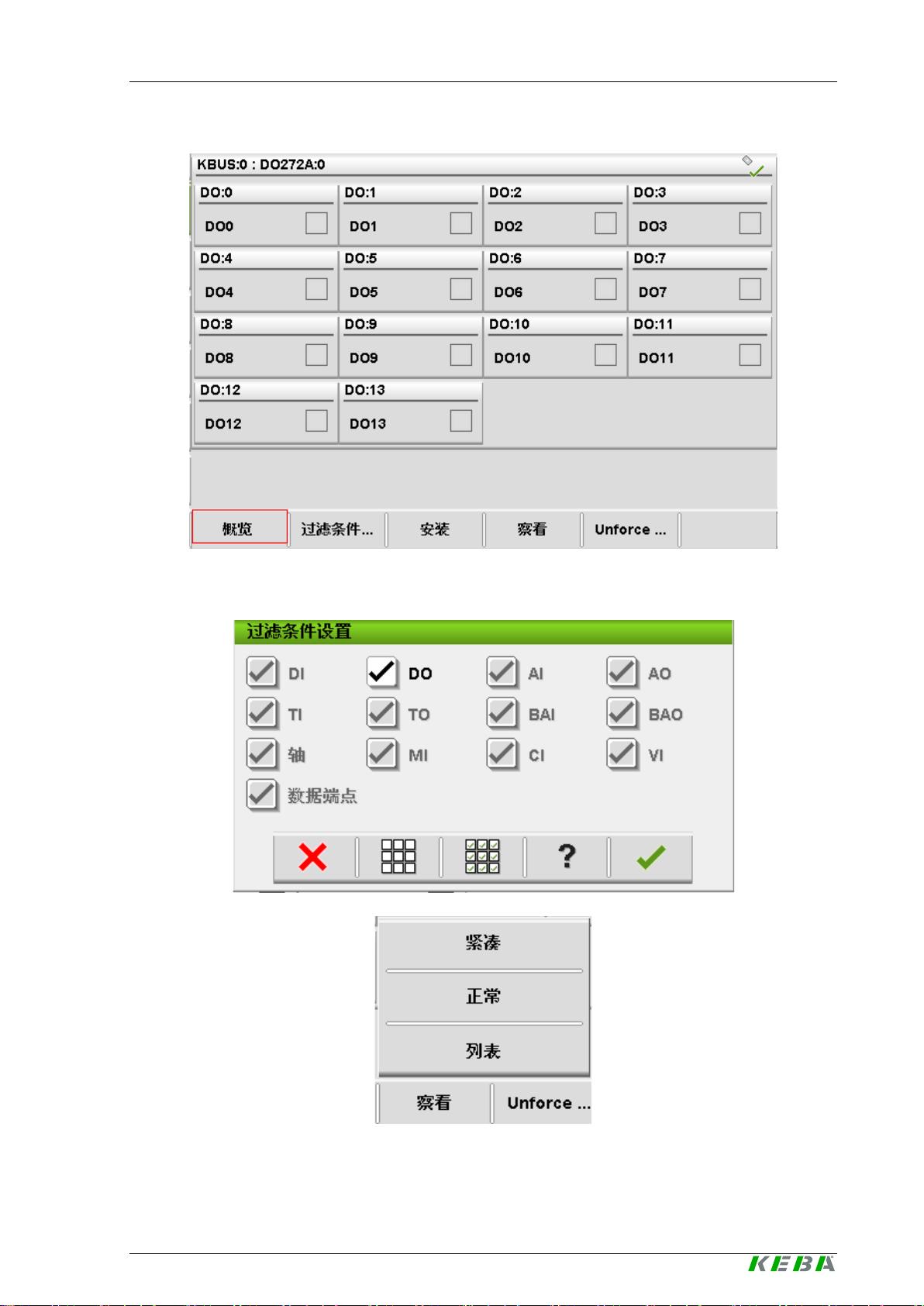
概览与详细可以相互切换。进入详细模式后,通过点击概览可以切换到输入输出
监测页面。
剩余152页未读,继续阅读

sky_goodStudy
- 粉丝: 30
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- Lombok 快速入门与注解详解
- SpringSecurity实战:声明式安全控制框架解析
- XML基础教程:从数据传输到存储解析
- Matlab实现图像空间平移与镜像变换示例
- Python流程控制与运算符详解
- Python基础:类型转换与循环语句
- 辰科CD-6024-4控制器说明书:LED亮度调节与触发功能解析
- AE particular插件全面解析:英汉对照与关键参数
- Shell脚本实践:创建tar包、字符串累加与简易运算器
- TMS320F28335:浮点处理器与ADC详解
- 互联网基础与结构解析:从ARPANET到多层次ISP
- Redhat系统中构建与Windows共享的Samba服务器实战
- microPython编程指南:从入门到实践
- 数据结构实验:顺序构建并遍历链表
- NVIDIA TX2系统安装与恢复指南
- C语言实现贪吃蛇游戏基础代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


