ABB机器人安全与系统详解
版权申诉
164 浏览量
更新于2024-07-06
收藏 3.21MB PDF 举报
"ABB机器人学习_主要看这个.pdf"
ABB机器人技术是全球领先的自动化解决方案之一,尤其在工业机器人领域有着深厚的底蕴。这份资料详细介绍了ABB机器人的安全操作规范、历史发展、系统结构以及核心组件的功能。
1、安全操作
安全是使用ABB机器人时的首要考虑。在自动模式下,工作区域应始终保持无人状态。长时间暂停时,不应在夹具上放置工件,以防止意外启动。紧急情况下,可以通过E-stop键停止机器人运行,但这样会中断当前程序。编程、测试和维修需切换到手动模式,并保持使能器在可控状态。当调试人员进入工作区时,也应携带使能器,以防他人误操作。在停电时,须关闭主电源并移除夹具上的工件,非授权人员禁止操作机器人。
2、ABB机器人简介
ABB在1974年制造了第一台机器人,并且随着时间的发展,推出了IRC5控制系统,广泛应用于焊接、喷涂和搬运等领域。IRB1410是常见的一款型号,它的承载能力为5KG,上臂负载可达18KG,拥有1444mm的最大工作半径,且具备额外扩展一个外部轴的能力,特别适合焊接和搬运作业。
3、机器人系统结构
ABB机器人由六个关节轴组成,形成一个六杆开链机构,可以到达其工作空间内的任何位置。每个轴配备有齿轮箱,确保高精度运动(综合精度在±0.05mm至±0.2mm之间)。机器人采用AC伺服电机驱动,每个电机后配有编码器和刹车,确保精确控制。此外,串口测量板(SMB)用于保存数据,手动松闸按钮用于维修,平衡气缸或弹簧则有助于维持稳定。
4、伺服驱动系统
伺服驱动系统是机器人运动的关键,它包括驱动单元和电机,能够根据指令精确控制机器人的每一个动作,实现高速、高精度的定位。
5、IRC5控制系统
IRC5系统包括主电源、计算机供电单元、主计算机模块、输入/输出板、用户连接端口、示教盒接口、轴计算机板和驱动单元等组件。其中,变压器提供所需电力,驱动板负责驱动机器人本体和外部轴,串口测量板记录数据,轴计算机和主计算机协调机器人动作,齿轮和电机则执行实际的机械运动,编码器则反馈实时位置信息,确保精确控制。
这份资料深入浅出地介绍了ABB机器人的各个方面,对于学习和理解ABB机器人的工作原理和安全操作具有很高的参考价值,非常适合准备进入或已经在该领域工作的专业人士阅读。
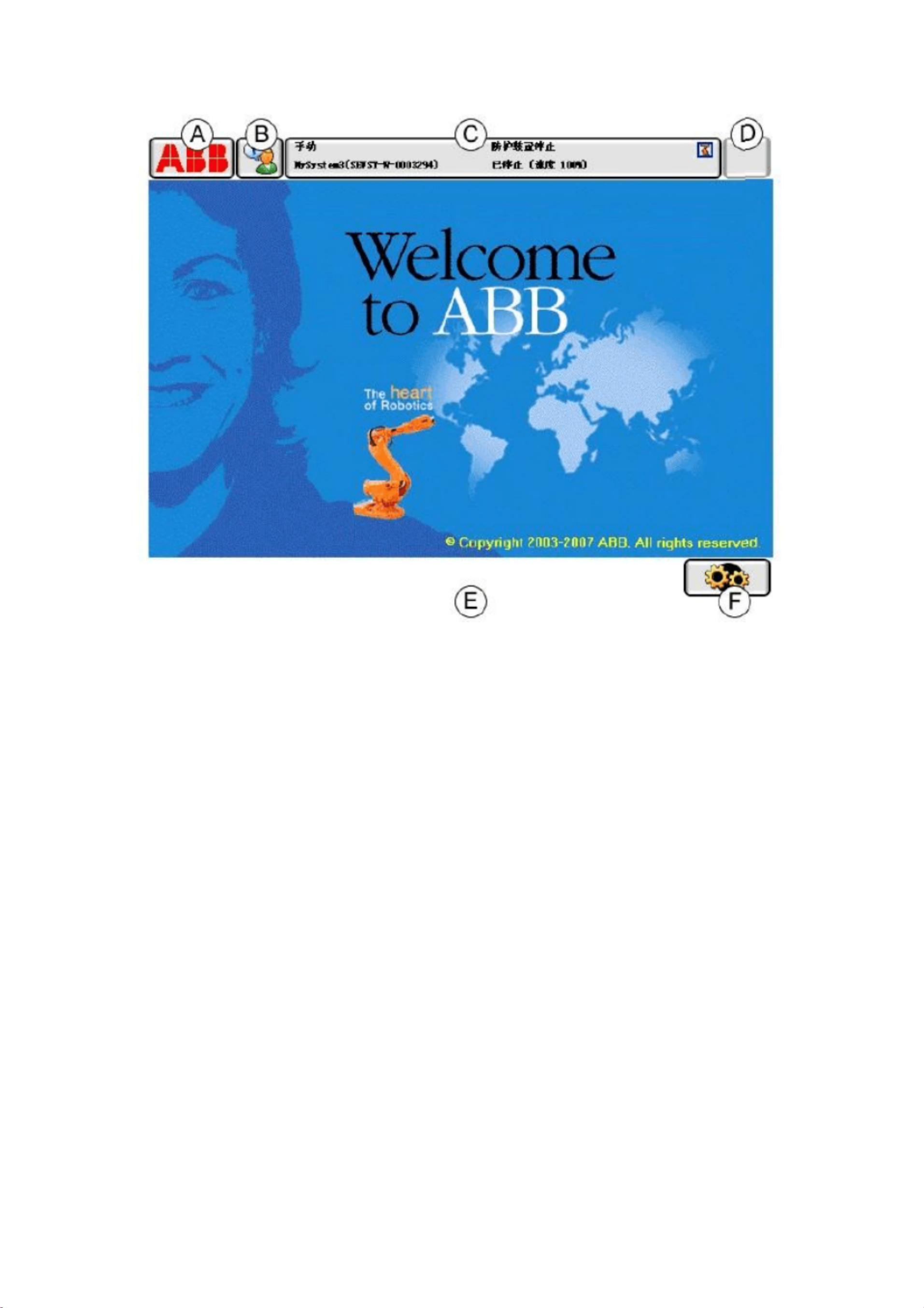
初始界面
A ABB菜单、 B 操作员窗口、 C 状态栏、 D 关闭按钮、 E 任务栏、 F " 快速设置 " 菜单
8、坐标系统(和 KUKA 的一样)
Tools coordinates 工具坐标系、 Base coordinates 基本坐标系、 World coordinates 大地坐
标系、 Work Object 工件坐标系。
9、手动操作机器人
剩余22页未读,继续阅读
2019-10-19 上传
2022-01-31 上传
2024-09-10 上传
2023-06-28 上传
2023-05-25 上传
2023-09-05 上传
2023-05-12 上传
2023-08-18 上传
2023-08-06 上传

无敌开心
- 粉丝: 1913
- 资源: 10万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
