秦志强博士讲解:连续旋转伺服电机在机器人学习中的应用与连接教程
需积分: 7 163 浏览量
更新于2024-07-21
1
收藏 440KB PDF 举报
本资源是关于机器人学习的第二部分课程,由秦志强博士主讲,内容主要围绕连续旋转伺服电机在机器人中的应用。课程起始于2007年7月,目标是帮助学生理解并掌握机器人伺服电机的工作原理和实际操作技巧。
课程的核心知识点包括:
1. 伺服电机简介:机器人伺服电机作为执行机构,负责将控制器(大脑)发送的运动指令转化为机械动作,类似于人类的肌肉。学习重点在于理解控制指令,如方向、速度和运行时间的PBASIC编程技术。
2. 任务1:连接伺服电机 - 学生需学会将伺服电机连接到教学底板,通过电源接口(如6V或7.5V直流电源),并将电机的控制信号线正确连接。搭建的LED电路用于监控伺服电机接收到的运动控制信号。
3. 任务2:伺服电机调零 - 这个环节涉及到电机的零点标定,即发送特定信号使电机达到静止状态,这是确保精确控制的基础。
4. 实践技能:课程强调培养工程素质和技能,包括正确识别和处理电机的三根电线功能(控制信号、电源和地线),以及在实际电路设计中的应用。
5. 课程结构:课程按照理论讲解和实践操作相结合的方式进行,先介绍电机的基本知识,再引导学生动手连接和调试,最后进行小结,总结本章所学的关键点。
通过这门课程,学生将对机器人伺服电机有深入的理解,能够独立完成基础的电机连接和调零工作,并为后续的机器人控制系统开发打下坚实的基础。
2007年7月
连接伺服电机到教学底板
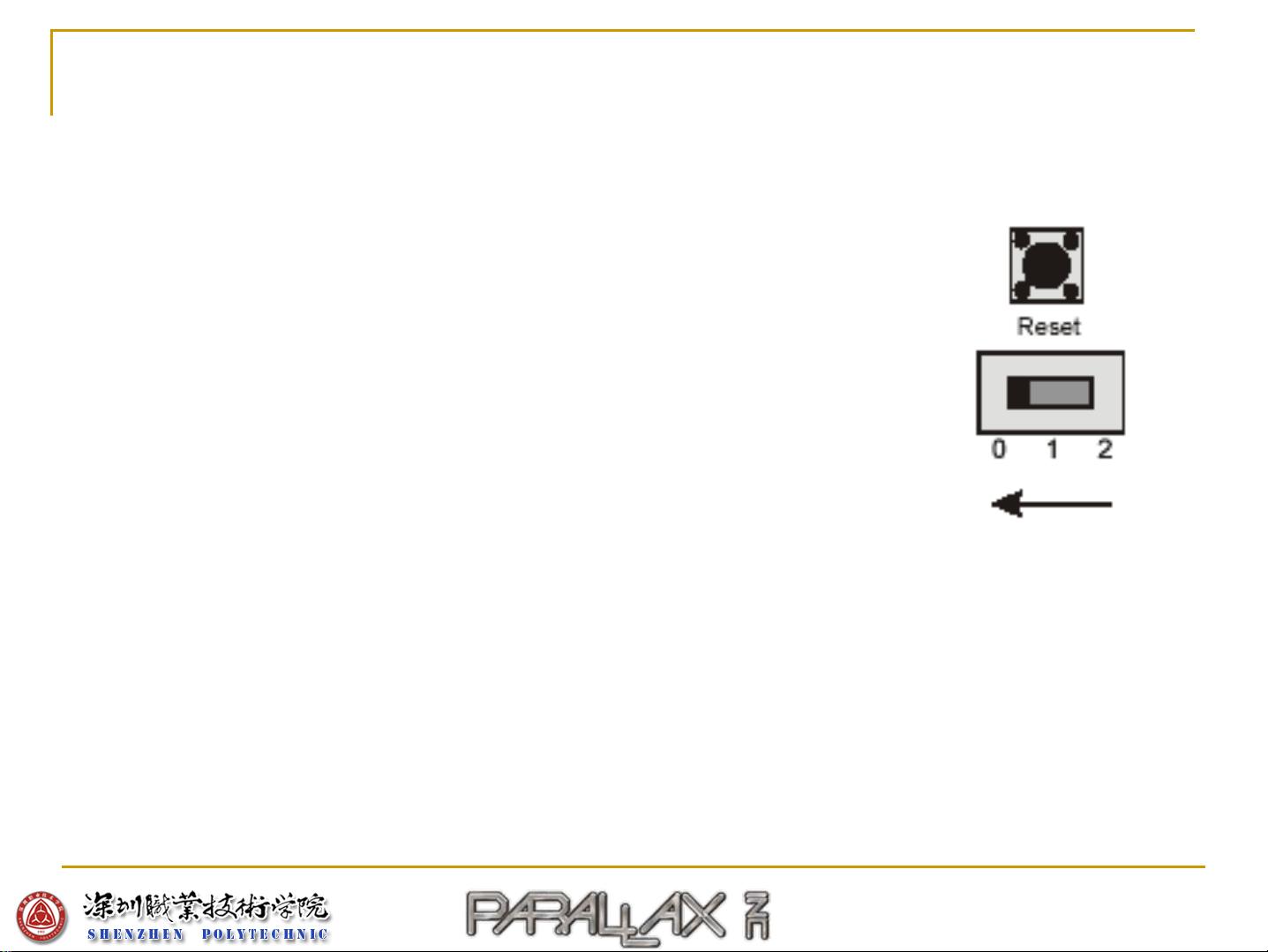
把三位开关拨至0位切断教学底板的电源。
显示的是教学板上伺服电机接线端子。
剩余29页未读,继续阅读
2016-02-28 上传
2016-02-28 上传
论文
论文
论文
论文
点击了解资源详情
2023-07-23 上传
2023-06-23 上传

xiaosongyj
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
