MATLAB实现卡尔曼滤波理论与实践第三版详解
需积分: 5 66 浏览量
更新于2024-06-29
收藏 5.11MB PDF 举报
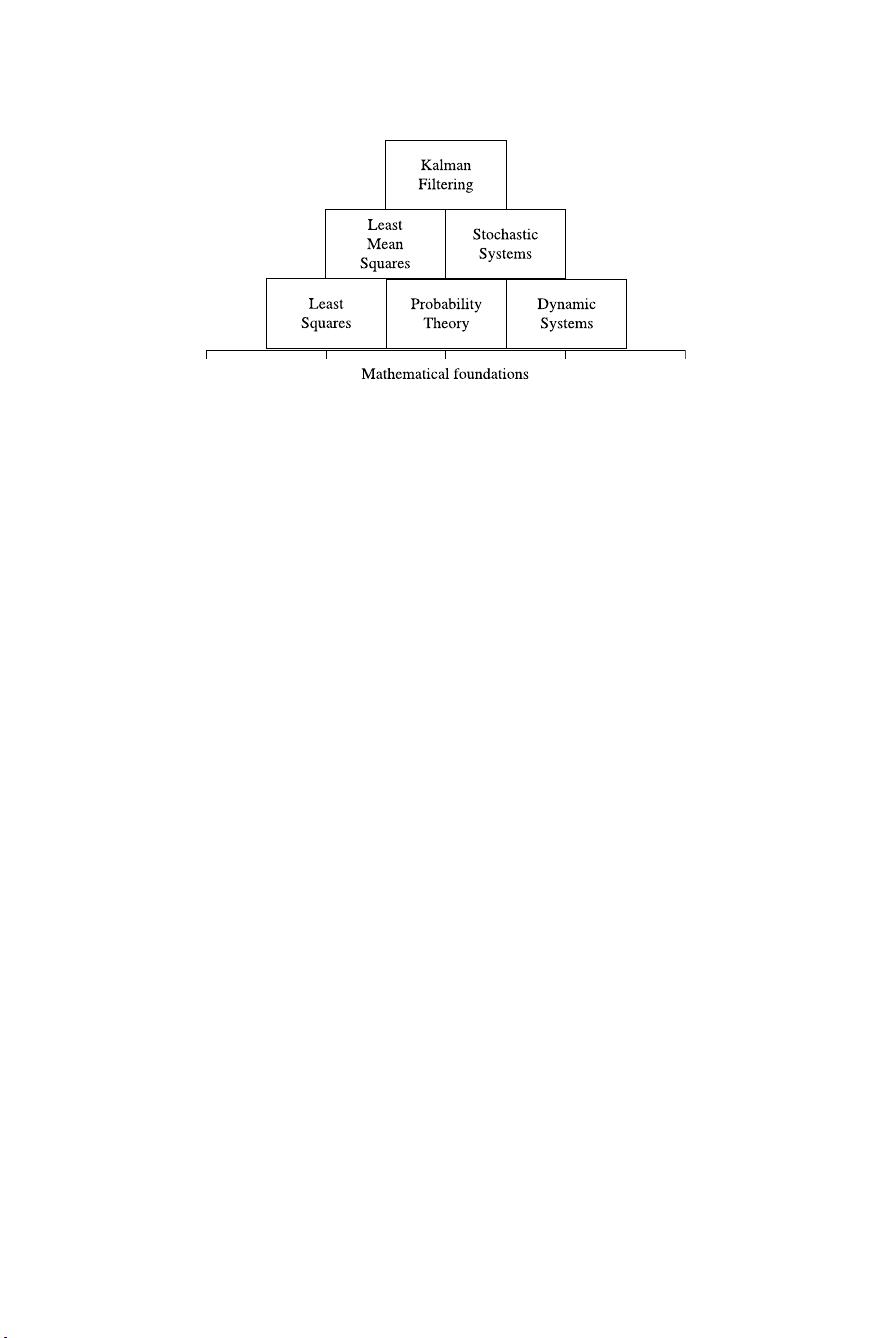
《卡尔曼滤波理论与实践:MATLAB应用教程(第三版)》是一本由Mohinder Grewal教授和Angus Andrews共同编写的著作,出版于2008年,由John Wiley & Sons, Inc. 出版。本书主要聚焦于卡尔曼滤波这一关键的信号处理技术,该技术在许多领域,如导航、控制系统、信号估计和预测等方面发挥着重要作用。卡尔曼滤波是一种递归最小二乘方法,用于估计动态系统的状态,并考虑到观测数据中的噪声不确定性。
本书的核心内容包括以下几个方面:
1. **理论基础**:深入讲解卡尔曼滤波的原理,包括随机过程、线性系统理论、状态空间模型、预测与更新步骤、协方差矩阵和信息增益等概念。读者将理解滤波器如何通过结合系统的动态模型和观测数据来实时估计状态并减小误差。
2. **MATLAB实现**:作者以MATLAB为例,详细介绍了如何在实际项目中使用这个强大的工具进行滤波器设计和仿真。书中提供了大量的代码示例,帮助读者掌握如何编写和调试卡尔曼滤波算法。
3. **应用实例**:书中包含多个实例,涵盖航空导航、自动驾驶、遥感、通信系统等领域,展示了卡尔曼滤波在实际问题中的应用效果和优化策略。
4. **扩展话题**:除了基本的无迹卡尔曼滤波(UKF)和粒子滤波(PF),本书还可能探讨了自适应滤波、非线性滤波和其他高级主题,以满足不同读者的专业需求。
版权信息表明,任何未经许可的复制、存储、传输行为均需获得John Wiley & Sons, Inc. 的明确授权。如果你对本书的内容感兴趣,可通过指定的联系方式申请许可。
《卡尔曼滤波理论与实践:MATLAB应用教程(第三版)》是一本实用的教材,不仅适合工程学生和研究人员学习卡尔曼滤波理论,也适用于需要在实际项目中应用该技术的专业人士。通过本书,读者将获得深入理解卡尔曼滤波的精髓以及如何利用MATLAB进行高效实现和优化。

that you want to control, and the Kalman filter provides a means for inferring the
missing information from indirect and noisy measurements. The Kalman filter is
also used for predicting the likely future courses of dynamic systems that people
are not likely to control, such as the flow of rivers during floods, the trajectories of
celestial bodies, or the prices of traded commodities.
From a practical standpoint, these are the perspectives that this book will present:
†
It is only a tool. It does not solve any problem all by itself, although it can make
it easier for you to do so. It is not a physical tool but a mathematical one.
Mathematical tools make mental work more efficient, just as mechanical
tools make physical work more efficient. As with any tool, it is important to
understand its use and function before you can apply it effectively. The
purpose of this book is to make you sufficiently familiar with and proficient
in the use of the Kalman filter so that you can apply it correctly and efficiently.
†
It is a computer program. It has been called “ideally suited to digital computer
implementation” [95], in part because it uses a finite representation of the esti-
mation problem—by a finite number of variables. It does, however, assume that
these variables are real numbers—with infinite precision. Some of the problems
encountered in its use arise from the distinction between finite dimension and
finite information and from the distinction between finite and manageable
problem sizes. These are all issues on the practical side of Kalman filtering
that must be considered along with the theory.
†
It is a consistent statistical characterization of an estimation problem.Itis
much more than an estimator, because it propagates the current state of knowledge
of the dynamic system, including the statistical influence of random dynamic per-
turbations and the effects of all past measurements. These properties are extremely
useful for statistical analysis and the predictive design of sensor systems.
If these answers provide the level of understanding that you are seeking, then there is
no need for you to read the rest of this book. If you need to understand Kalman filters
well enough to use them effectively, then please read on!
1.1.2 How It Came to Be Called a Filter
It might seem strange that the term filter would apply to an estimator. More com-
monly, a filter is a physical device for removing unwanted fractions of mixtures.
(The word felt comes from the same medieval Latin stem, for the material was
used as a filter for liquids.) Originally, a filter solved the problem of separating
unwanted components of gas-liquid-solid mixtures. In the era of crystal radios and
vacuum tubes, the term was applied to analog circuits that filter electronic signals.
These signals are mixtures of different frequency components, and these physical
devices preferentially attenuate unwanted frequencies.
This concept was extended in the 1930s and 1940s to the separation of signals
from noise, both of which were characterized by their power spectral densities.
GENERAL INFORMATION2

剩余580页未读,继续阅读
233 浏览量
2013-01-30 上传
2014-12-02 上传
2023-06-09 上传
2023-02-22 上传
2023-07-30 上传
2023-07-25 上传
2023-06-13 上传
2023-06-15 上传
2023-05-11 上传

承让@
- 粉丝: 8
- 资源: 380
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
