
2.1.2 机器人的组成
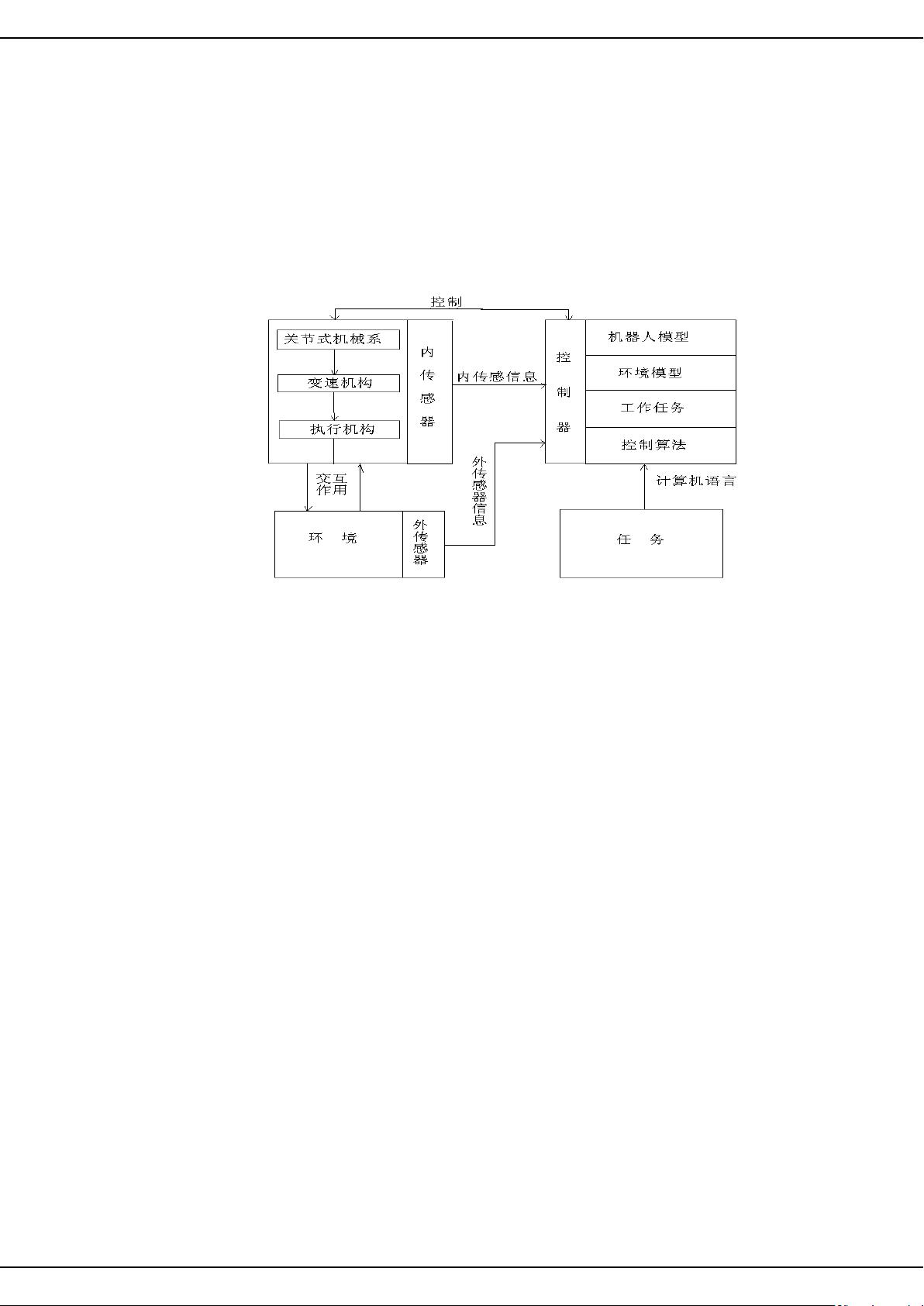
一个机器人系统,一般由下列四个互相作用的部分组成:机械手、环境、任务和控制
器,图 2-1 为其简化形式。
图 2-1 机器人控制系统图
具体来说,机器人基本上是由机械本体结构、关节伺服驱动、计算机控制系统、传感
系统、通讯接口等几部分组成。
(1) 机器人的机械本体结构和关节伺服驱动
机器人的机械本体机构基本上有两大类:一类是操作性本体结构,它类似人的手臂和
手腕,配上各种手爪和末端操作器进行各种抓取动作和作业操作。工业机器人主要采用这
种本体结构。另一类是移动型本体结构,主要目的是实现移动功能,有轮式车,履带车以
及足腿式结构,以及蛇行,蠕动,变形运动等。
机器人本体机械结构的动作靠的是关节驱动,机器人的关节驱动大多是基于闭环控制
的原理来进行的。常用的驱动单元是各种伺服电机,由于一般伺服电机的输出转速很高,
输出转矩较小,而关节需带动的负载的转速不高,负载力矩却不小,因此,经常在电机与
负载之间用一套传动装置来进行转速和转矩的匹配。
(2) 计算机控制
各关节伺服驱动的指令值有主计算机计算后在每个采样周期给出。主计算机根据示教
点参考坐标空间位置、方位及速度,先进行点与点的插补,得到空间轨迹在各采样时刻的
数据,通过逆运动学计算把空间数据转变为各关节的指令值。
剩余63页未读,继续阅读

omyligaga
- 粉丝: 60
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







