平行泊车路径规划PPT介绍及比较分析
102 浏览量
更新于2024-01-14
1
收藏 1.61MB PPTX 举报
平行泊车路径规划是指在平行泊车场景下,通过算法和模型建立,为车辆规划最佳的泊车路径,以保证泊车过程的顺利进行。这一过程需要考虑车辆的转向半径、车位尺寸、起始区域等多个因素,并基于此建立车辆模型和运动学模型。路径规划的目标是找到最合适的路径,以便车辆能够有效地进入泊车位,同时考虑到路径的曲率、连续性、原地转向等因素,以确保路径的稳定性和安全性。
在文章《平行泊车系统路径规划》中,作者详细介绍了平行泊车路径规划的基本流程,包括建立车辆模型、确定最小车位尺寸、理论可行起始区域等步骤。作者还对不同类型的泊车路径进行了比较和分析,包括两段圆弧路径、圆弧-直线-圆弧路径、B样条曲线路径、反正切函数路径以及五次多项式曲线路径,分别列举了它们的优点和缺点,从而为读者提供了一个全面的路径规划选择参考。
根据文章中的介绍,平行泊车路径规划的关键在于选择合适的路径曲线类型,以确保路径的连续性、稳定性,同时尽量减小计算量和复杂度。从路径结构简单、车位尺寸需求小的角度看,两段圆弧路径是一种较为优选的曲线类型;而从曲率连续、易于跟踪角度看,圆弧-直线-圆弧回旋曲线路径则是更为适合的选择。不过,这些路径类型各有优缺点,需要根据具体泊车场景的要求进行选择和比较。
另外,作者介绍的反正切函数路径具有函数表达式简洁、易于计算、曲率连续等特点,适用于一定范围的泊车场景;而五次多项式曲线路径则需要适当增加车位长度以确保泊车终止点的曲率为零,不过这也是一种在一定条件下可行的路径规划方式。
总的来说,文章《平行泊车系统路径规划》详细介绍了平行泊车路径规划的基本内容和关键步骤,为读者提供了对泊车路径规划的全面了解和参考。同时,作者还针对不同类型的路径曲线进行了比较和分析,以便读者能够根据具体情况选择最适合的路径规划方式。这一文章的介绍和分析对于理解和应用平行泊车路径规划具有一定的指导意义,为相关研究和实践工作提供了有益的参考。
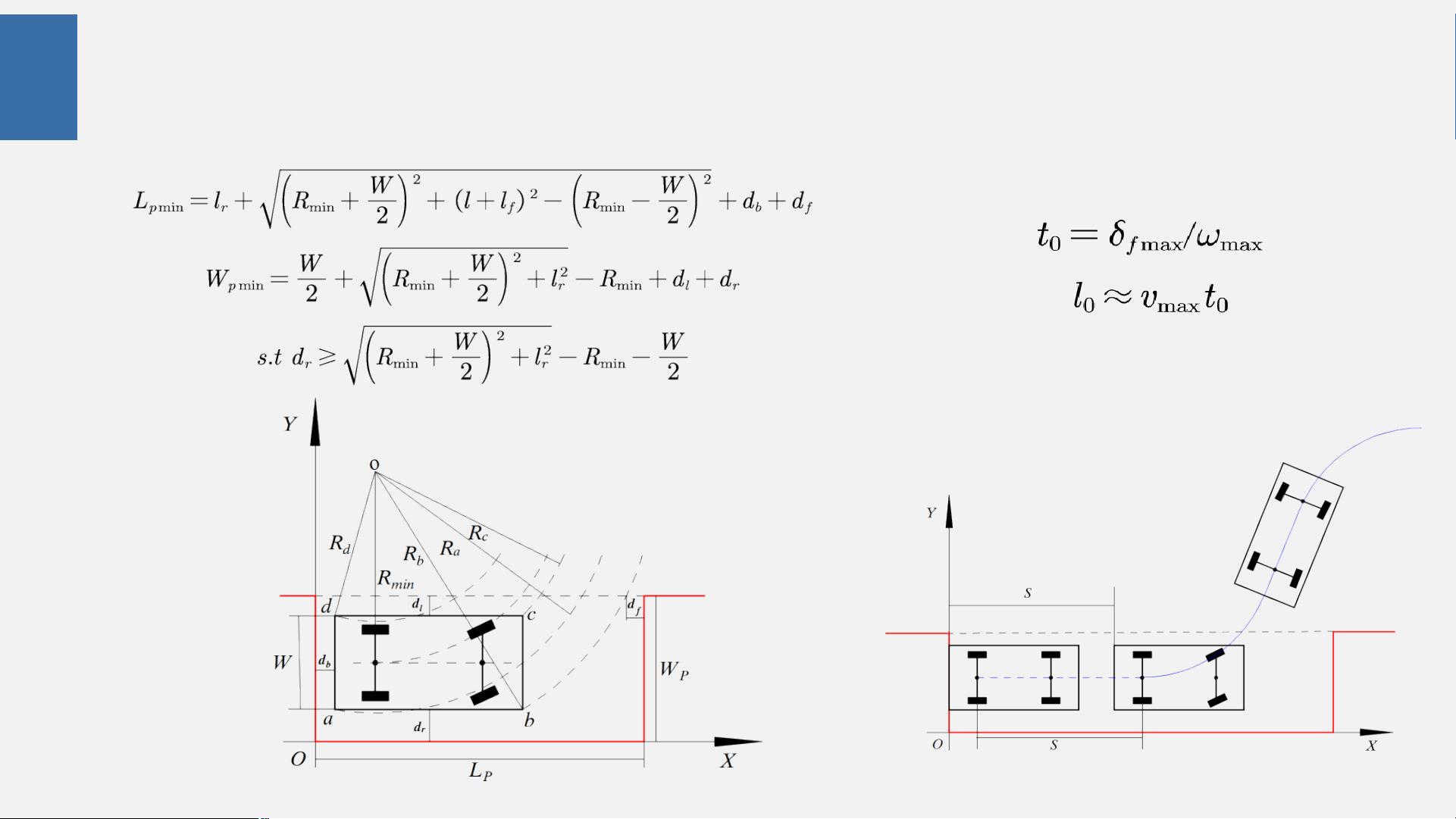
平行泊车路径规划——确定最小车位尺寸
剩余15页未读,继续阅读
2024-07-12 上传
点击了解资源详情
2023-05-05 上传
2020-05-10 上传
2024-03-22 上传
2024-07-07 上传
2023-07-10 上传
点击了解资源详情

sailing_he
- 粉丝: 344
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- cygwin,spin,xspin安装全过程记录
- 网络工程师学习笔记(数据通信基础知识)
- Cortex-M3权威指南
- A Simple Methodology for Applying UML to Database Design
- 高质量C/C++编程
- 嵌入式 C/C++语言精华文章集锦
- vs.net使用技巧
- 最小重量机器设计问题
- envi4.5 授权文件 license 绝对可用
- Struts快速学习指南
- C+语言中的指针和内存泄漏
- wimax技术的发展与展望
- struts in action 06
- 计算机故障速查手册(不可缺少的手边工具书)
- 华为_FPGA设计高级技巧Xilinx篇.pdf
- cobol课件 ibm主机系列
