S7-1200 AGV信号采集系统配置教程: Portal与PLC编程详解
需积分: 2 164 浏览量
更新于2024-08-04
收藏 2.09MB DOC 举报
本文档主要介绍了如何使用西门子S7-1200 PLC作为AGV(自动导引车)信号采集系统。首先,作者通过 Portal 软件进行系统配置,步骤如下:
1. **项目创建与设备添加**:
- 在 Portal 程序中,新建一个项目并给予恰当的命名,以便管理不同任务和设备配置。
2. **选择硬件**:
- 选择合适的设备型号,CPU型号为较低版本(如4.2),这可能是出于成本或性能考虑。
3. **PLC地址设置**:
- 组态完成后,需要设置PLC的网络地址,确保其与AGV通信网络中的其他设备正确识别。
4. **存储器配置**:
- 启用系统存储器字节,以保存程序、数据和配置信息,确保系统的稳定性。
5. **安全设置**:
- 配置连接机制,允许远程对象的PUT和GET通信,这是实现AGV与PLC之间数据交换的关键设置。
6. **数据块管理**:
- 新建数据块,并确保取消"优化的块访问"属性,这可能有助于提高程序执行效率。
7. **程序块设计**:
- 定义变量,使用默认变量表添加中间变量V1.0-V1.X,地址范围为Mx.0-Mx.7,适用于临时数据存储。
8. **主程序编写**:
- 在主程序OB1下,输入部分通过下拉菜单选择,例如输入地址I00.0-Ixx.x,与Kepware(一种工业自动化软件)中的输入名称匹配。
9. **输出编程**:
- 输出程序同样基于Kepware定义,如Output0的地址设置为Mx.x,同时通过设置中间变量(地址M00.x或V1.5)来驱动AGV的动作。
通过以上步骤,读者可以了解到如何利用S7-1200作为AGV信号采集系统的核心控制器,进行有效的数据交换和指令传输,从而实现AGV的精确导航和操作。这个过程涉及到了PLC的网络配置、存储管理、安全策略以及通信协议的运用,对于理解和实施实际的工业自动化应用具有很高的参考价值。
Portal 编写 s71200 的输入输出
运行 portal 软件,新建项目,命名,
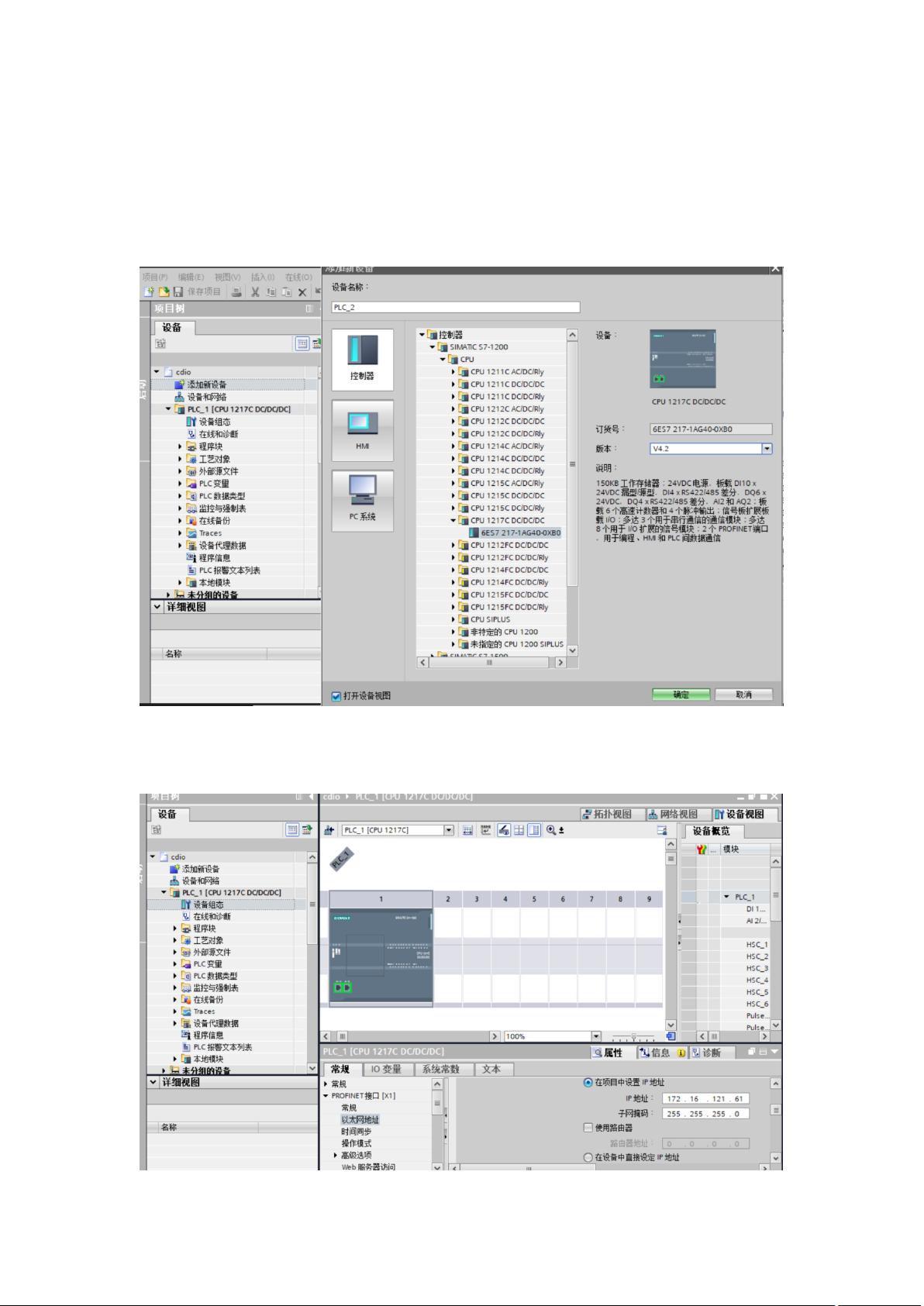
添加新设备,
选择设备型号,cpu 型号及版本,测试选择了较低的版本,4.2.
组态后设置 PLC 地址,
下载后可阅读完整内容,剩余4页未读,立即下载
2023-06-09 上传
2023-06-09 上传
2023-06-08 上传
2023-06-08 上传
2023-06-08 上传
2024-08-31 上传
2023-07-13 上传


chenyl78
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- AA4MM开源软件:多建模与模拟耦合工具介绍
- Swagger实时生成器的探索与应用
- Swagger UI:Trunkit API 文档生成与交互指南
- 粉红色留言表单网页模板,简洁美观的HTML模板下载
- OWIN中间件集成BioID OAuth 2.0客户端指南
- 响应式黑色博客CSS模板及前端源码介绍
- Eclipse下使用AVR Dragon调试Arduino Uno ATmega328P项目
- UrlPerf-开源:简明性能测试器
- ConEmuPack 190623:Windows下的Linux Terminator式分屏工具
- 安卓系统工具:易语言开发的卸载预装软件工具更新
- Node.js 示例库:概念证明、测试与演示
- Wi-Fi红外发射器:NodeMCU版Alexa控制与实时反馈
- 易语言实现高效大文件字符串替换方法
- MATLAB光学仿真分析:波的干涉现象深入研究
- stdError中间件:简化服务器错误处理的工具
- Ruby环境下的Dynamiq客户端使用指南
