

为式(10)所示.Φ 表示针与平行线的夹角, 因此根据极值分辨度的定义, 可知针与平行线始终
为垂直方向, Φ=π/2. 若 2a≥l≥a, 当 l−a<X<a 时, 针只与一条直线相交, 其概率为
P3=P{l−a<X<a}=∫al−af(x)dx=2a−la
(14)
若 l≤a, 当 0<X<l 时, 针只与一条直线相交, 其概率为
P4=P{0<X<l}=∫l0f(x)dx=la
(15)
若 l≥2a, 则针与一条平行线相交的概率为 P5=0. □
定理 3. 在噪声环境下, 对于由两条平行线确定的局部范围内的极值点, 若针同时与两
条平行线相交, 则找到该极值点的概率为 P6=1−Pξ, 若针只与其中一条平行线相交, 则找到
该极值点的概率为 P7=1−Pγ−Pξ.
证明. 根据算法的基本原理和极值分辨度的定义, 若针同时与两条平行线相交, 说明由
两条平行线确定的两个采样点包含在局部极值点所在的深井范围内, 即两个采样点确定的
范围内只包含唯一一个极值点, 在此局部范围内进行单极值点寻优, 无噪声环境下算法将以
概率 1 找到该极值点, 在噪声环境下, 该区域内将出现若干噪声引起的极值点, 若以概率
Pξ 出现函数值低于该极值点函数值的点, 则算法将保留函数值更低的点, 故找到该极值点
的概率为 P6=1−Pξ.
若针只与一条平行线相交, 则在三条平行线确定的范围内, 除去此针长 l 的确定的范
围, 其余(2a−l)的范围内, 若以概率 Pγ 出现函数值更低的极值点, 或以概率 Pξ 出现函数值更
低的噪声波动点, 则算法将留取函数值更低的点, 故 P7=1−Pγ−Pξ. □
综上可得如下推论:
推论 1. 设 a 为采样平行线间距, 称为蒲丰距离, 以函数的极值分辨度为固定针长 l,
若 2a≥l≥a, 则算法找到极值分辨度最小的极值点的概率为
P2a≥l≥a=P1⋅P6+P3⋅P7=l−aa⋅(1−Pξ)+2a−la⋅(1−Pγ−Pξ)=1−Pξ−2a−la⋅Pγ
(16)
若 l<a, 则算法找到极值分辨度最小的极值点的概率为
Pl<a=P2⋅P6+P4⋅P7=la⋅(1−Pγ−Pξ)
(17)
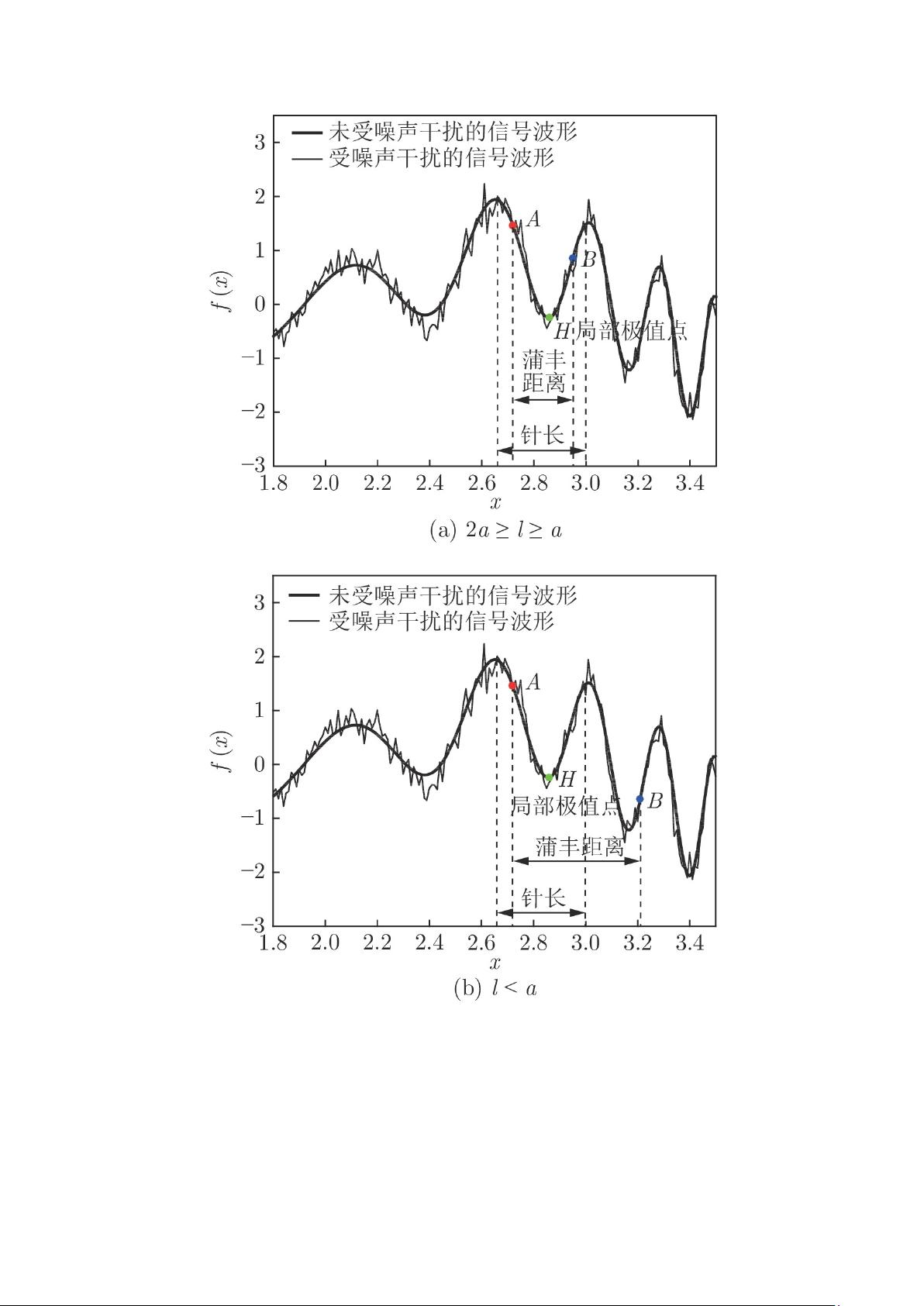
以一维函数为例, 图 5 (a)和 5 (b)所示分别是 2a≥l≥a 和 l<a 时的蒲丰距离与针长的示意
图.
剩余49页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4137
- 资源: 1万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







