
系统中要实现高精度定位比较困难(尤其在高速情况下,似乎更难想象)。此外气源工作压力
较低,抓举力较小。虽然气动技术作为机器人中的驱动功能已有部分被工业界所接受,而且
对于不太复杂的机械手,用气动元件组成的控制系统己被接受,但由于气动机器人这一体系
己经取得的一系列重要进展过去介绍得不够,因此在工业自动化领域里,对气动机械手、气
动机器人的实用性和前景存在不少疑虑。
璇停廿褥
璇停廿褥
1.2 气动机械手的设计要求
璇停廿褥
1.2.2 课题的设计要求
璇停廿褥
本课题将要完成的主要任务如下:
璇停廿褥
(1)机械手为通用机械手,因此相对于专用机械手来说,它的适用面相对较广。
璇停廿褥
(2)选取机械手的座标型式和自由度。
璇停廿褥
(3)设计出机械手的各执行机构,包括:手部、手腕、手臂等部件的设计。为了使通用性
更强,手部设计成可更换结构,不仅可以应用于夹持式手指来抓取棒料工件,在工业需要的
时候还可以用气流负压式吸盘来吸取板料工件。
璇停廿褥
(4)气压传动系统的设计
璇停廿褥
本课题将设计出机械手的气压传动系统,包括气动元器件的选取,气动回路的设计,
并绘出气动原理图。
璇停廿褥
(5)机械手的控制系统的设计
璇停廿褥
本机械手拟采用可编程序控制器(PLC)对机械手进行控制,本课题将要选取PLC型号,根
据机械手的工作流程编制出PLC程序,并画出梯形图。
璇停廿褥
璇停廿褥
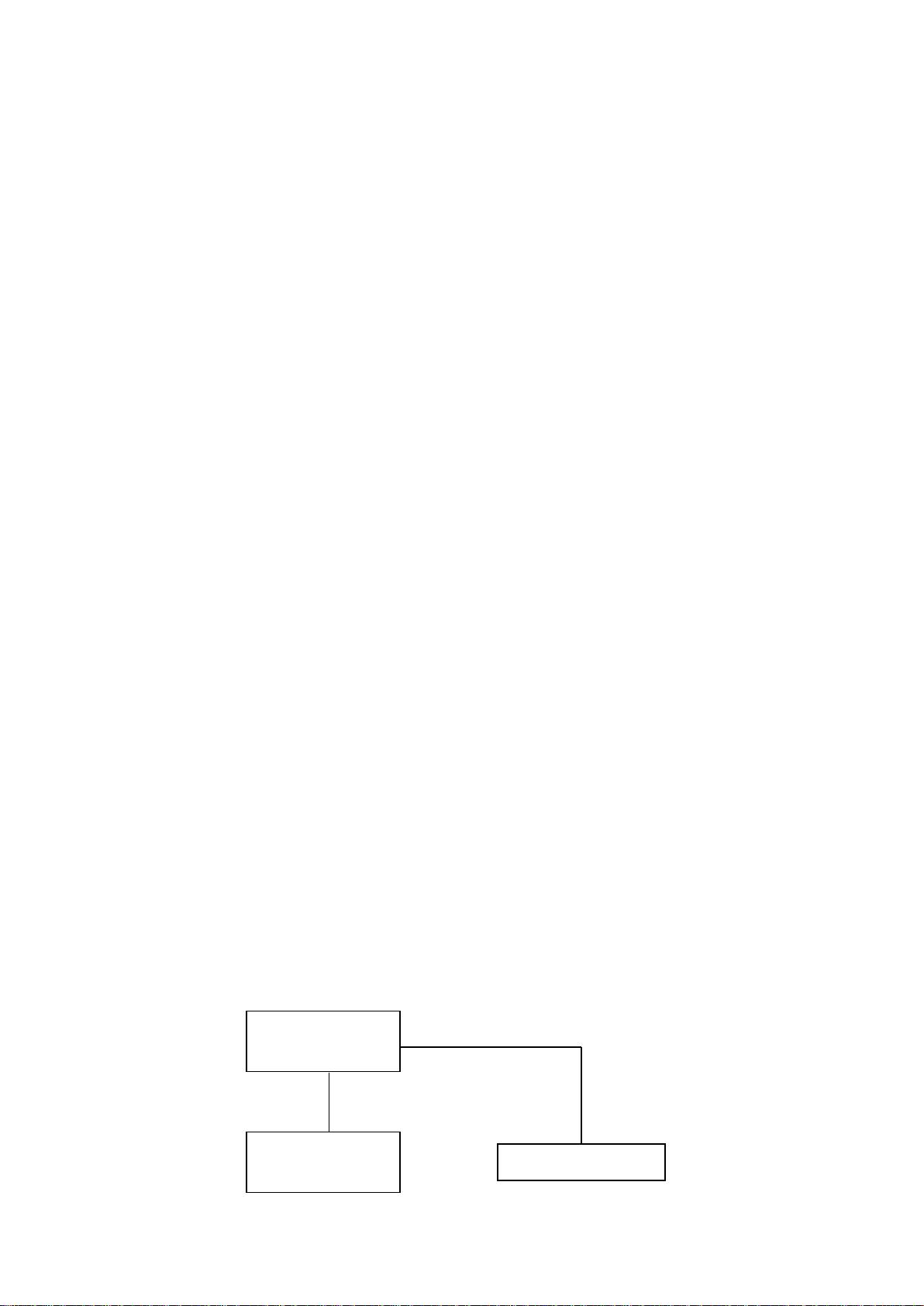
1.3 机械手的系统工作原理及组成
璇停廿褥
机械手的系统工作原理框图如图1-1所示。
璇停廿褥
璇停廿褥
璇停廿褥
璇停廿褥
璇停廿褥
璇停廿褥
璇停廿褥
璇停廿褥
控制系统
璇停廿褥
(PLC)
璇停廿褥
驱动系统
璇停廿褥
(气压传动)
璇停廿褥
位置检测装置
璇停廿褥
剩余23页未读,继续阅读

omyligaga
- 粉丝: 60
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







