视觉传感焊缝跟踪技术在焊接机器人中的应用
2 浏览量
更新于2024-08-31
收藏 227KB PDF 举报
"传感技术中的基于视觉传感的焊缝跟踪技术着重于提升焊接精度,通过实时纠偏应对焊接过程中的各种不确定性。文章以新型航天器燃料贮箱LF6铝合金2mm薄板对接焊接为实际应用背景,研究了脉冲钨极惰性气体保护焊(GTAW)的焊缝跟踪方法,实验涉及日本安川电机公司的机器人、OTC公司的焊接电源等设备,并采用了自行开发的CCD被动光视觉系统进行图像采集与处理。"
在焊接技术领域,基于视觉传感的焊缝跟踪技术是提高焊接质量和效率的关键手段。传统的“示教再现”模式虽然常见,但其对工件的微小变化和焊接过程中的复杂因素适应性较弱。焊接时,焊枪与焊缝的对准偏差、工件的热变形、焊缝间隙变化等因素都可能导致焊接质量下降。因此,引入实时焊缝纠偏技术,能够在原有工作模式基础上增强焊接机器人的智能响应,尤其适合处理焊接易变形、装配复杂的工件。
本文聚焦于脉冲钨极惰性气体保护焊(GTAW),这是一种精密的焊接方法,适用于LF6铝合金薄板的焊接。通过使用交直流两用的焊接电源,调整焊接参数(如脉冲频率、基值电流和峰值电流),以实现最佳的焊接效果。实验配置了包括焊接机器人、变位机、送丝机在内的先进设备,同时结合工控机和自主研发的视觉传感系统,实现了对焊缝的实时监测和跟踪。
图像采集与处理是视觉传感系统的核心环节。实验中采用“小窗口分析法”,在焊缝区域选择特定的图像子区域进行处理,这种方法能够提取焊缝特征信息,减少处理数据量,提高处理速度和准确性。通过对这些特征信息的分析,机器人能够实时调整焊接路径,确保焊枪准确对准焊缝,从而提高焊接精度和稳定性。
基于视觉传感的焊缝跟踪技术在焊接自动化中起着至关重要的作用,它能够显著提高焊接工艺的精度和可靠性,尤其在面对高精度需求和复杂工况时,这一技术的应用显得尤为关键。通过不断的研发和优化,这种技术有望在未来焊接行业中得到更广泛的应用,推动焊接自动化向更高层次发展。
传感技术中的基于视觉传感的焊缝跟踪技术传感技术中的基于视觉传感的焊缝跟踪技术
目前服役的焊接机器人90% 都是以“示教再现”模式进行工作的, 少数以轨迹规划方式工作.焊接过程中, 焊枪与焊
缝中心都会存在一定误差, 而且焊接过程又是一个复杂、非线性、干扰因素较多的过程, 焊接工件热变形、咬
边、错边, 以及焊缝间隙的变化等是不可预知的, 这些因素都会直接影响到焊接质量. 在“示教再现”或轨迹规划应
用的基础上,实时焊缝纠偏可以进一步提高焊接精度, 尤其适用于辅助工程上焊接易变形、装配复杂等自动焊难以
控制的工件生产. 本文以新型航天器燃料贮箱LF6 铝合金材2 mm 薄板的对接焊接为背景, 针对脉冲钨极惰性气体
保护焊( GT AW) 焊接方法, 对平板直缝和平板法兰进行焊缝跟踪
目前服役的焊接机器人90% 都是以“示教再现”模式进行工作的, 少数以轨迹规划方式工作.焊接过程中, 焊枪与焊缝中心都
会存在一定误差, 而且焊接过程又是一个复杂、非线性、干扰因素较多的过程, 焊接工件热变形、咬边、错边, 以及焊缝间隙的
变化等是不可预知的, 这些因素都会直接影响到焊接质量. 在“示教再现”或轨迹规划应用的基础上,实时焊缝纠偏可以进一步提高
焊接精度, 尤其适用于辅助工程上焊接易变形、装配复杂等自动焊难以控制的工件生产. 本文以新型航天器燃料贮箱LF6 铝合金
材2 mm 薄板的对接焊接为背景, 针对脉冲钨极惰性气体保护焊( GT AW) 焊接方法, 对平板直缝和平板法兰进行焊缝跟踪试验,
将传统的“示教再现”型机器人开发成具有实时焊缝跟踪的弧焊机器人系统.
1 试验部分试验部分
1. 1 试验系统组成试验系统组成
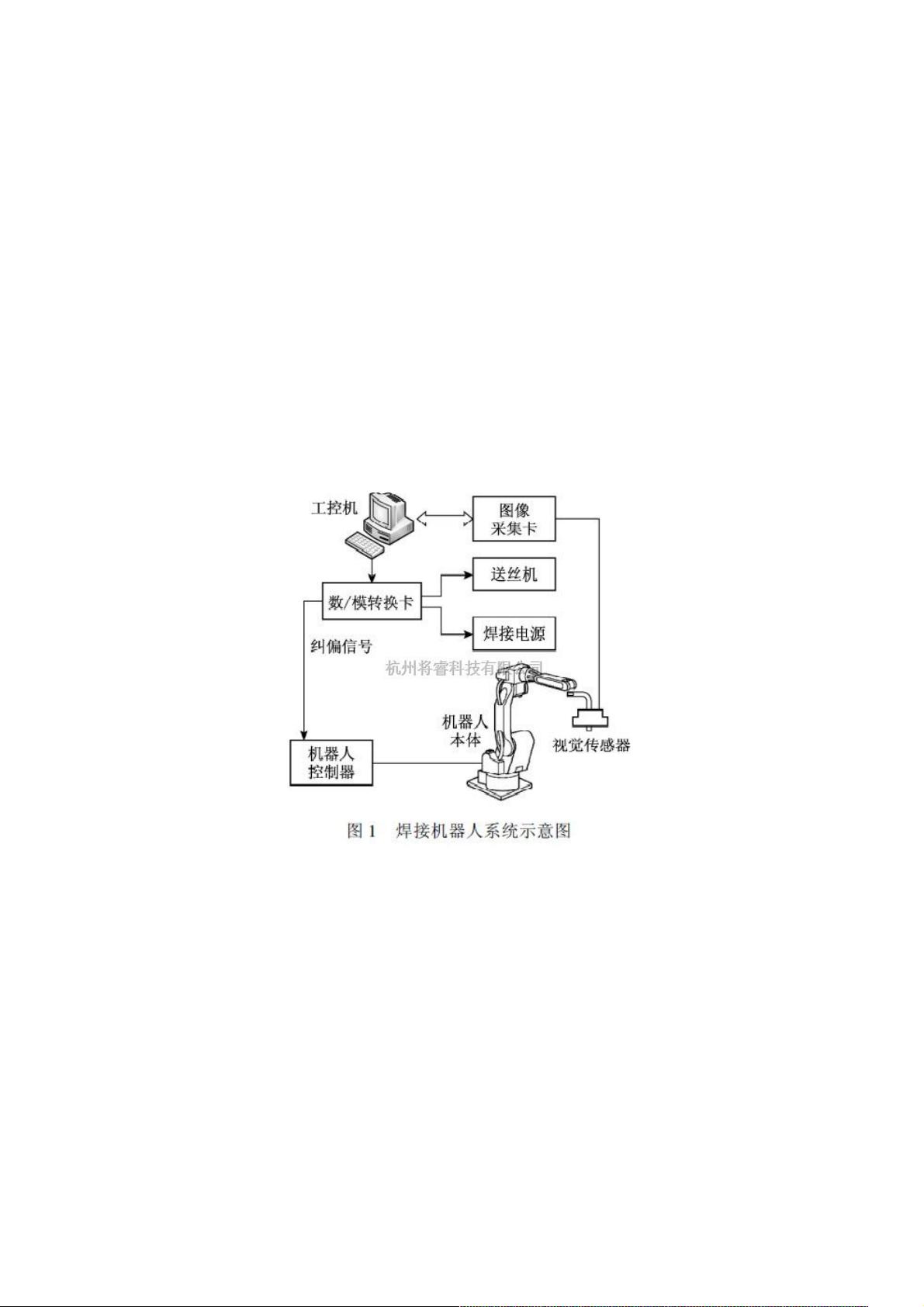
在本实验中, 执行机构包括日本安川电机公司的HP6 型焊接机器人, 两轴翻转变位机, 单轴头尾式变位机, 日本OT C 公司生
产的IN VERTERELESON 500P 型交直流两用GT AW 焊接电源,CM-271 型送丝机和HC-71 型送丝控制箱. 控制系统为研华公
司的工控机, 传感系统为自行开发的CCD 被动光视觉系统, 以及图像采集卡. 整个系统如图1 所示.
考虑到LF6 铝合金薄板的焊接性, 采用交流脉冲焊进行焊接, 脉冲频率为2 H z, 基值电流为50 A,峰值电流为125 A, 焊接速
度为2. 6 mm/ s.
1. 2 图像采集与处理图像采集与处理
1. 2. 1 开小窗口分析法
采用“小窗口”获取焊缝特征信息, 在焊缝区域开了一个100 帧x120 帧的小窗口, 仅对此窗口内的图像进行处理. 该窗口包含
了进行焊缝跟踪所需要的特征信息, 又削减了大量不必要的图像信息. CCD 摄像机和送丝嘴都固定在焊枪上, 也就是焊枪、钨
极、送丝嘴在图像平面投影的相对位置是不变的, 同时在试验前已经将CCD 摄像机的轴心、焊枪轴心以及焊缝调节到了同一个
平面上, 如此, 焊枪的轴线在图像平面上的投影为一条水平线, 为后续的跟踪提供了便利条件.
1. 2. 2 图像处理算法
在试验中, 首先提取到焊缝的上下边缘, 经过去除伪点之后进行最小二乘法拟合, 得到焊缝中心线. 图像处理算法流程主要包
括图像复原、中值滤波、边缘寻找、伪点去除及最小二乘法拟合, 如图2 所示 .
下载后可阅读完整内容,剩余3页未读,立即下载
2008-10-09 上传
2021-01-19 上传
2020-10-20 上传
2021-08-07 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38668335
- 粉丝: 7
- 资源: 938
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
