捷联式惯导姿态更新算法对比研究
需积分: 10 149 浏览量
更新于2024-09-09
收藏 1.13MB DOC 举报
"捷联式惯导姿态更新的研究"
捷联式惯导( Strapdown Inertial Navigation System,简称SINS)是一种现代化的导航系统,它没有物理平台,而是依赖于安装在机体上的传感器来获取飞行器的运动信息。关键在于如何准确地更新和维护系统中的姿态信息,这对整个系统的导航精度至关重要。姿态更新涉及到将机体坐标系中的测量数据转换为惯性坐标系中的数据,这一过程涉及到一系列复杂的数学运算。
欧拉角算法是常用的一种姿态更新方法,它通过三个旋转角(航向角Ψ、俯仰角θ和滚转角γ)来描述机体与地理坐标系之间的相对位置。欧拉角的动态变化可以通过陀螺仪测量得到的角速度进行更新。然而,欧拉角算法存在万向节死锁问题,当飞行器进行特定的运动组合时,可能会导致计算错误。
四元数算法则提供了一种更高效的解决方案,四元数是一种扩展的复数形式,能够表示三维空间中的旋转。相比于欧拉角,四元数避免了万向节死锁,并且在处理连续旋转时更加稳定。四元数的实时更新通过解决四元数微分方程实现,这通常涉及陀螺仪测量的角度增量。标准化四元数在保持单位长度的同时,确保了旋转的无损表示。
此外,旋转矢量算法也是一种实用的方法,它使用一个三维向量来表示旋转,简化了姿态更新的计算。在实际应用中,如文中提到的三旋转矢量优化算法,可能进一步提高了算法的效率和精度。
在圆锥运动等复杂情况下,不同算法的表现会有所差异。例如,欧拉角算法在处理某些特定运动模式时可能会遇到计算困难,而四元数和旋转矢量算法则能更好地适应这些情况。通过对各种算法的模拟分析,可以评估它们在不同条件下的性能,从而为实际应用选择最适合的算法。
捷联式惯导姿态更新的研究涵盖了多种数学模型和算法,每种都有其优点和适用场景。为了提高导航系统的整体性能,理解并优化这些算法是非常必要的。通过对比分析和模拟测试,可以不断改进姿态更新过程,提升捷联式惯导系统的精度和可靠性。
捷联式惯导姿态更新的研究
作者:彭淑华、张波
摘要:姿态的更新时捷联式惯导的关键技
术,其精度对捷联式惯导(SINS)有很大
的短暂影响。因此,为了提高系统的精度,
选择高精度的姿态更新算法具有重要的意
义。代表算法是欧拉角算法、四元数算法、
旋转矢量算法和改进的旋转矢量算法。基
于实际应用,本文对欧拉角算法、四元数
算法和三旋转矢量优化算法进行研究并模
拟分析了在圆锥运动的情况下各算法的性
能。
关键词:捷联式惯导;圆锥运动;欧拉角;
四元数;旋转矢量
1. 引言
捷联式惯导系统的特点是没有实体的
平台,它使用计算机来完成导航平台的功
能,使用所谓的“数学平台”。捷联式惯导的
测量设备直接连接在机体上的,并且测量
角速度的陀螺仪和加速度计是沿着机体的
三个轴系统的方向安装的。加速度计的测
量参考该机体框架的轴向比。由于测量装
置直接连接在机体上,它们测量的是在机
体框架中的数据。这些数据需要转换得到
惯性系数据,而转换的关键是计算实时姿
态的数学平台,就是所谓的姿态矩阵或捷
联矩阵和方向余弦矩阵。陀螺仪的输出将
主体框架的角旋转速度投射到惯性空间,
并以此来更新姿态矩阵。姿态的更新时捷
联式惯导系统的重要组成部分,有很多的
算法来做到这点。本文同过一些模拟来分
析欧拉角算法、四元数算法和三旋转矢量
优化算法并比较它们的性能。
2. 姿态更新算法
A. 欧拉角算法
欧拉角在力学中是常用的,用来确定
移动的坐标系和参考坐标系之间的相对角
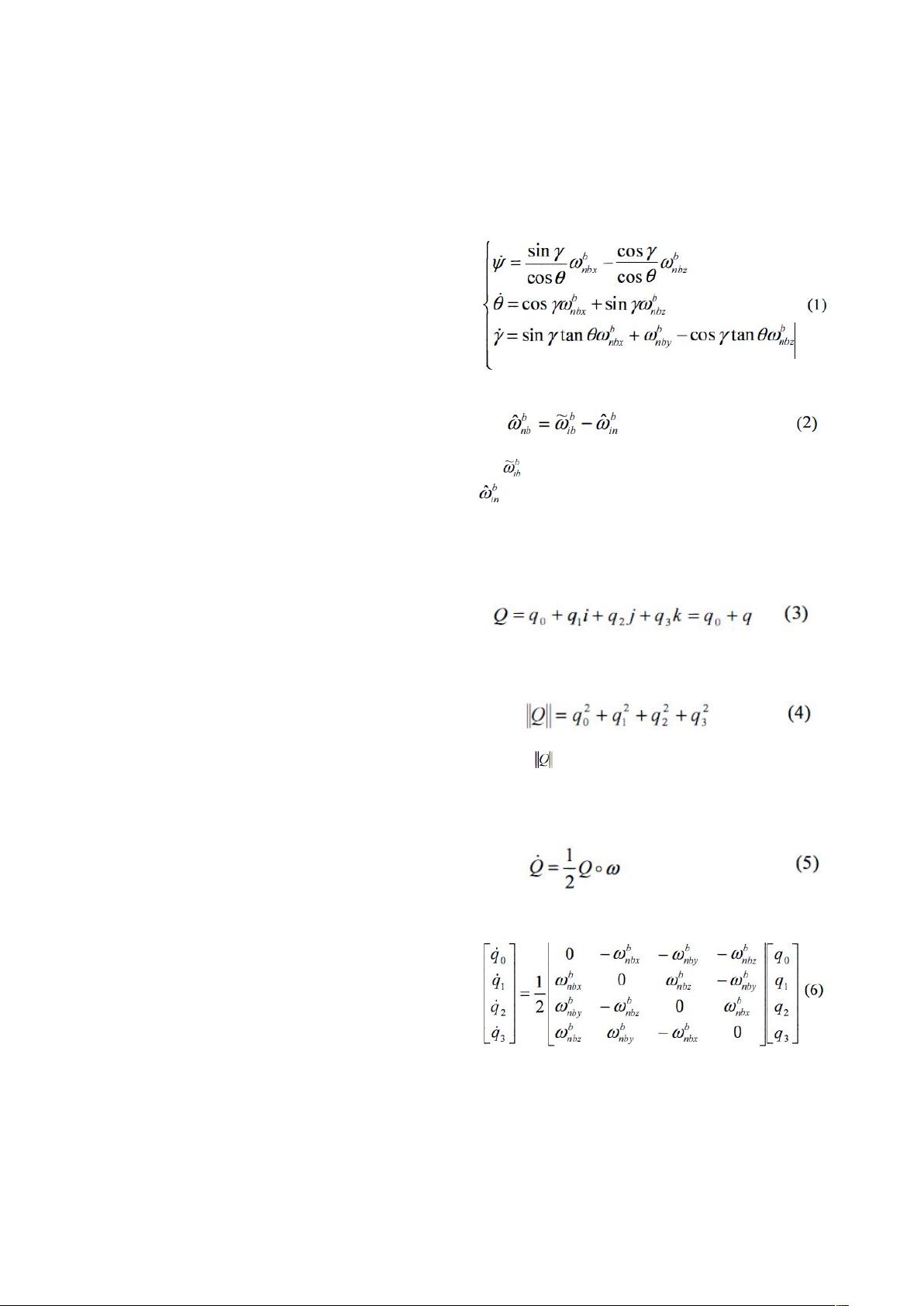
度。实际的航向角 Ψ、俯仰角 θ 和滚转角
γ 是旋转体的一组欧拉角,它描述了机体
坐标系和地理坐标系之间的位置和角度的
关系。设机体框架和地理框架为 n 和 g,
并且用 ω
nb
来表示姿态角速度,因此,欧
拉角的微分方程为(参考[3]):
姿态角速度由以下公式决定:
是通过陀螺组合测量得到的数据;
是根据维度和运转速率计算得到的数
据。
B. 四元数算法
四元数是通过四个单元的数构成的一个
数,其形式为(参考[2]):
q
0
是个标量,q 是个矢量。
四元数的数值由以下标准描述:
如果 =1,那么 Q 就被称为标准化的四
元数。
四元数的实时值可以通过求解四元数微分
方程得到,可以通过以下的方程描述:
"。"表示四元数的乘法。
其矩阵形式为(参考[1]):
一般陀螺仪的输出量为在采样时间间
隔内的角度的增加量。为了避免差动放大
带来的噪声,角的增幅量应该通过计算转
换成为四元数,而不是角速度。Bika 解决
方法是一种常见的算法,通过角度的增量
下载后可阅读完整内容,剩余3页未读,立即下载
2019-07-30 上传
2023-05-25 上传
2023-06-20 上传
2023-08-17 上传
2023-05-10 上传
2023-08-05 上传
2024-01-03 上传
2023-06-10 上传

qq_27792601
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- ASP.NET数据库高级操作:SQLHelper与数据源控件
- Windows98/2000驱动程序开发指南
- FreeMarker入门到精通教程
- 1800mm冷轧机板形控制性能仿真分析
- 经验模式分解:非平稳信号处理的新突破
- Spring框架3.0官方参考文档:依赖注入与核心模块解析
- 电阻器与电位器详解:类型、命名与应用
- Office技巧大揭秘:Word、Excel、PPT高效操作
- TCS3200D: 可编程色彩光频转换器解析
- 基于TCS230的精准便携式调色仪系统设计详解
- WiMAX与LTE:谁将引领移动宽带互联网?
- SAS-2.1规范草案:串行连接SCSI技术标准
- C#编程学习:手机电子书TXT版
- SQL全效操作指南:数据、控制与程序化
- 单片机复位电路设计与电源干扰处理
- CS5460A单相功率电能芯片:原理、应用与精度分析
