保证收敛的IIR数字滤波器Minimax设计局部优化算法
需积分: 9 123 浏览量
更新于2024-07-10
收藏 1.86MB PDF 举报
"IIR数字滤波器的Minimax设计中,一种具有收敛性的有序局部优化算法的研究论文。该论文提出了一种改进的顺序部分优化(Sequential Partial Optimization, SPO)算法,以解决IIR滤波器设计中的非凸性和稳定性约束问题。"
在数字信号处理领域,无限脉冲响应(Infinite Impulse Response, IIR)滤波器是广泛应用的工具,它们能够以较低的计算复杂度实现复杂的频率响应特性。然而,IIR滤波器的设计通常面临两个主要挑战:设计问题的高度非凸性和滤波器稳定性的严格限制。非凸性使得找到全局最优解变得困难,而稳定性则是确保滤波器不会产生不稳定响应的关键条件。
为了应对这些挑战,研究者们发展了各种优化算法。本文介绍的是一种有序局部优化算法,即SPO算法,它将整体设计问题分解为一系列子问题,每个子问题仅更新两个二次分母因子。这种方法旨在降低非凸性,使优化过程更加可控。然而,原始的SPO算法在理论上并不能保证收敛到全局最优解。
针对这一局限,论文提出了一种改进的SPO算法,通过在每个子问题中应用增量更新并优化步长,确保了算法的收敛性。这一改进基于Karush-Kuhn-Tucker (KKT) 条件,这是非线性优化中的一个关键概念,用于判断一个解是否满足局部最优解的必要条件。KKT条件结合了梯度信息和约束条件,可以指导优化过程。
在新算法中,每次迭代不仅考虑了优化方向,还考虑了步长的选择,这有助于防止算法陷入局部极小值,并促进其向全局最优解的收敛。此外,论文可能还包括了数值实验和性能比较,证明了所提算法在解决IIR滤波器Minimax设计问题时的有效性和优势。
这篇研究论文贡献了一种新的、有保证收敛性的优化方法,对于提高IIR滤波器设计的效率和精度具有重要意义,特别是在对滤波器性能和稳定性有严格要求的应用中。这一进展为数字信号处理领域的滤波器设计提供了更强大的工具,并可能启发未来更多的优化策略。
Circuits Syst Signal Process (2018) 37:4336–4362 4341
(−2
ρ
,
ρ
2
)
(2
ρ
,
ρ
2
)
(0, −
ρ
2
)
a
n1
2h
2h
Stability triangle
a
n2
Trust quadrate
(a
n1
( ), a
n2
( ))
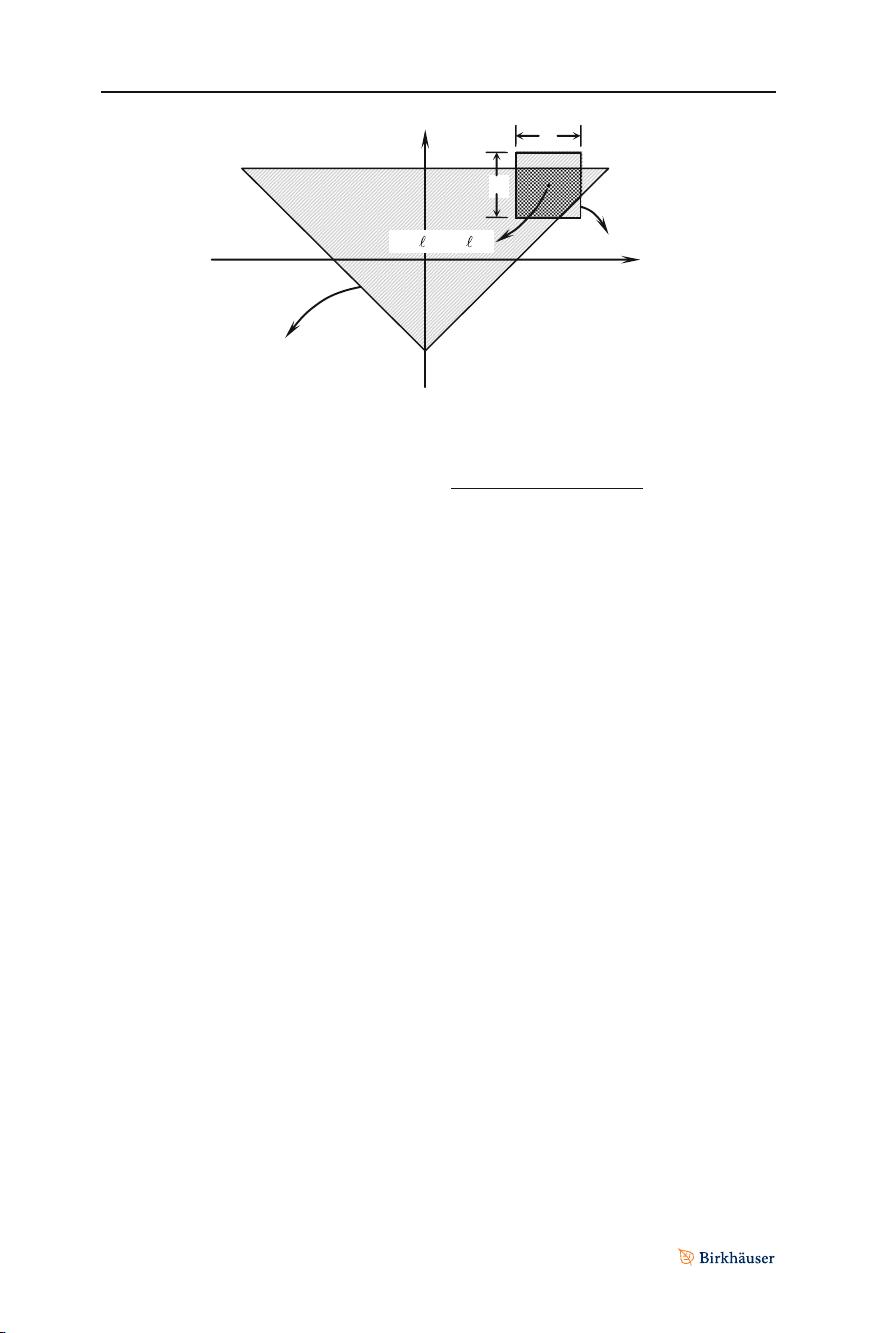
Fig. 1 The stability triangle for the filter 1/ A
n
(z, a
n
) and the trust quadrate for δa
n
at a
n
()
E(ω, a, b) ≡ H (e
jω
, a, b) − D(ω) =
B(e
jω
, b)
Q+sign(J )
q=1
˜
A
q
e
jω
,
˜
a
q
− D(ω). (3b)
For the filter H (z, a, b), a well-known necessary and sufficient stability condition
is that all poles of the filter or all zeros of its denominator lies inside the unit circle.
With the representation (2c) of the filter denominator, the stability domain S of the
filter H (z, a, b) can be described by S =
˜
S
1
×
˜
S
2
×···×
˜
S
Q+sign(J )
, where
˜
S
q
={
˜
a
q
|
all zeros of
˜
A
q
(z,
˜
a
q
) lie inside the unit circle} and the symbol “×” is the Cartesian
product operator. If the filter H (z, a, b) is required to have certain robustness on its
stability, say, all poles are required to lie inside the circle of radius ρ<1.0, the stability
domain becomes
S(ρ) =
˜
S
1
(ρ) ×
˜
S
2
(ρ) ×···×
˜
S
Q+sign(J )
(ρ) with (4a)
˜
S
q
(ρ) =
S
(q−1)P+1
(ρ) × S
(q−1)P+2
(ρ) ×···×S
qP
(ρ), q ≤ Q,
S
QP+1
(ρ) × S
QP+2
(ρ) ×···×S
QP+J
(ρ), q = Q + 1,
(4b)
and S
n
(ρ) ={a
n
∈ R
2
|both zeros z
kn
of A
n
(z, a
n
) satisfy |z
kn
| <ρ,k = 1, 2} or
S
n
(ρ) =
a
n
∈ R
2
|
ρa
n1
|
− a
n2
≤ ρ
2
, a
n2
≤ ρ
2
, (4c)
where S
n
(ρ) in (4c) is the stability triangle of the filter 1/ A
n
(z, a
n
) with pole radius
ρ<1.0[15,18,19], as shown in Fig. 1.
Remark 1 We have implicitly assumed that the IIR digital filter will be implemented
with infinite word-length arithmetic. It is pointed out that, however, if the filter is
implemented with finite word-length arithmetic, its stability issue will be much more
involved since the filter may become a nonlinear one, and some recent results can be
found in [2,3,21] for this case.
剩余26页未读,继续阅读
点击了解资源详情
2019-08-13 上传
2021-03-13 上传
2021-09-29 上传
2021-03-08 上传
2022-09-15 上传
2022-09-14 上传
2010-06-26 上传
点击了解资源详情

weixin_38607554
- 粉丝: 5
- 资源: 970
 我的内容管理
展开
我的内容管理
展开







最新资源
- XML Generation By Java
- 2009年全国硕士研究生入学统一考试计算机科学与技术学科联考计算机学科专业基础综合考试大纲.pdf
- 声光控、电子整流、电子调光实验
- 一种快速霍夫曼解码算法及其软硬件实现
- C#完全手册(c#教材)
- AT89S52单片机中文资料
- 3261的中文版(国际级的标准)
- windCe 开发手册
- SQL 语句参考.pdf
- 常用linux基本操作
- 基于Internet的多媒体教学系统结构
- 交换机使用手册命令大全
- USB驱动开发文档(PDF)
- Telelogic Synergy Tutorial PDF
- Linux初学者入门优秀教程
- Linux操作系统下C语言编程入门.pdf
