人形机器人实用知识汇总:环境部署与关键技术
版权申诉
137 浏览量
更新于2024-06-19
1
收藏 3.63MB PDF 举报
"人形机器人_31实用知识库分享"是一个全面的集合,涵盖了人形机器人领域的关键技术和应用实例。这个资源集合包含了多个主题,从基础理论到实际操作,旨在帮助读者深入理解并掌握人形机器人技术。
1. Memmo2020 Summer School:这部分介绍了在该暑期学校中关于人形机器人环境部署的具体步骤,包括使用Docker进行容器化部署,以便于快速搭建和管理软件环境。学习者可以通过官方文档安装Docker,并运行一个命令行,设置端口映射、共享文件夹和实时交互,以实现在虚拟环境中部署Memmo2020的课程内容。
2. Kinematic Planning:继Memmo环境部署后,第二篇文章详细探讨了人形机器人运动规划的基础,包括理论介绍和实际操作,这对于机器人路径规划和动作设计至关重要。
3. Pinocchio论文及例程:Pinocchio是一个开源的机器人动力学库,涉及到机器人模型的构建和动力学分析,通过研究相关的论文和例程,用户可以了解如何在实际项目中应用Pinocchio。
4. Crocoddyl动力学仿真引擎:这一部分讲解了如何利用Crocoddyl进行人形机器人动力学仿真,为控制策略的设计和评估提供了强大的工具。
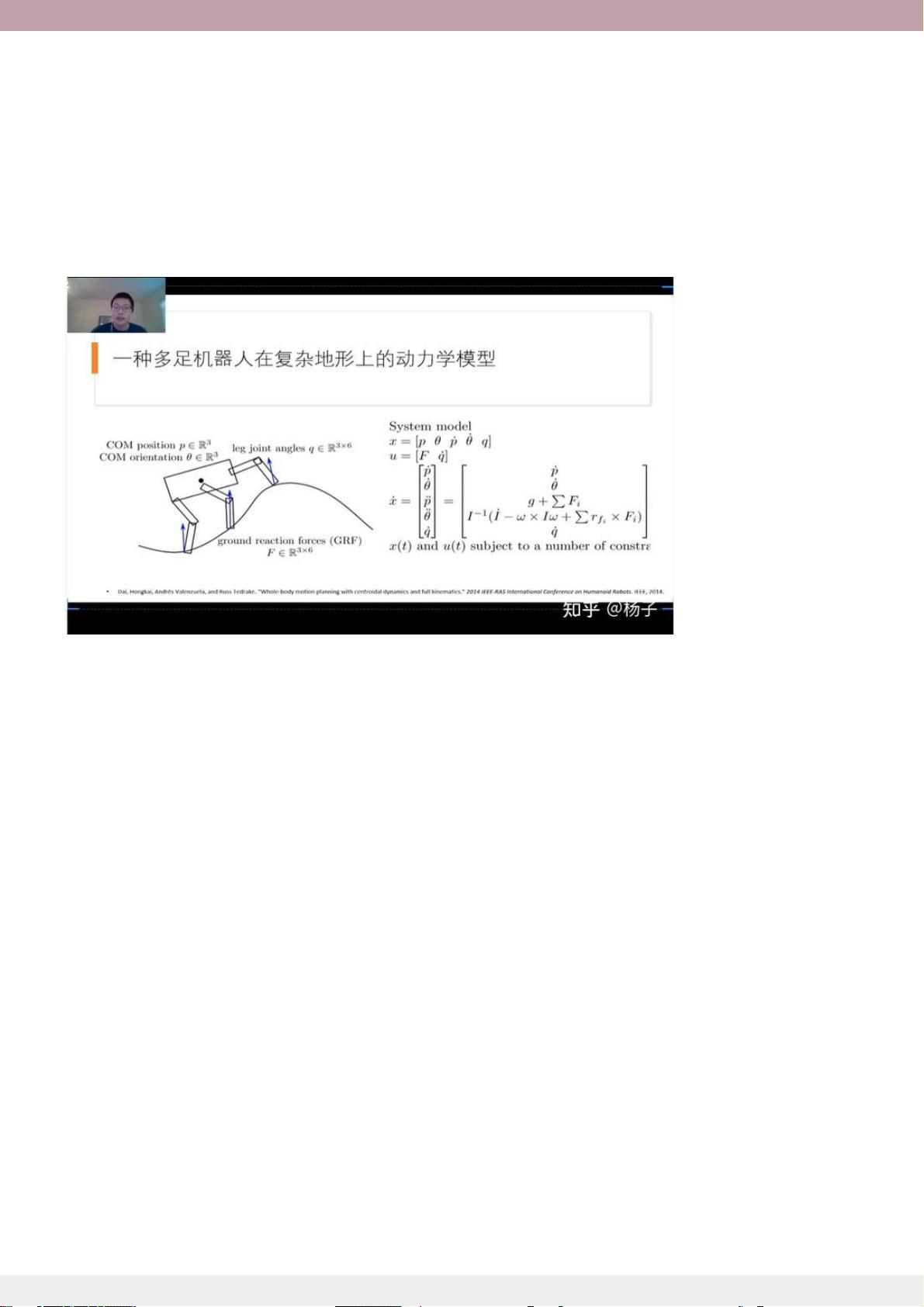
5. 约束机器人轨迹规划:杨硕的论文展示了如何处理带约束的轨迹规划问题,特别是在复杂环境中,如四足机器人的步态规划。
6. 四足机器人跳跃轨迹优化:文章针对四足机器人设计了优化的跳跃轨迹,强调了动态性能和安全性的重要性。
7. 足式机器人MPC:模型预测控制(MPC)是控制四足机器人的重要策略,这部分内容深入探讨了如何通过MPC实现精准的运动控制。
8. 博主资源:提供了一些高质量的足式机器人博主,这些博主分享了最新的研究成果和技术动态,对于追踪行业进展很有帮助。
9. 力分配与QP优化:介绍了一种优化方法,即力分配的力控制策略结合线性二次规划(QP),用于改善四足机器人的稳定性。
10. QP求解器比较:不同的QP求解器在实际应用中的性能对比,有助于选择最适合项目的解决方案。
11. 足式机器人建图:探讨了机器人在环境感知中的建图技术,这对于导航和避障至关重要。
12. 动力学仿真引擎:深入剖析了动力学模拟在人形机器人开发中的作用,包括仿真环境的选择和配置。
13. qpOASES优化库:重点介绍了qpOASES优化库,这是一个高效求解大规模线性二次规划问题的工具。
14. RF-MPC: Representation-Free Model Predictive Control (RF-MPC) 是一种无模型预测控制方法,特别适用于动态运动控制。
15. 足端速度噪声解决:讨论了如何处理足端速度测量的不确定性,提高机器人控制的精度。
16. Pybullet四足机器人:使用Python库Pybullet进行四足机器人的模拟和控制,展示了其在实际项目中的应用。
17. 足式论文阅读:精选了一些高级的学术论文,涉及动态运动控制和无模型预测控制等高级技术。
18. VMC四足机器人仿真Webots:通过虚拟机器人大赛(VMC)平台,学习如何在Webots环境中实现Trot步态的仿真。
19. 复现研究结果:提供了如何使用PyBullet重现Cheetah 3等四足机器人在Laikago上的实验步骤。
20. 笛卡尔阻抗控制:基于优化的控制策略,探讨了如何通过笛卡尔空间的阻抗控制实现四足机器人的精确操作。
21. Pybullet单腿机器人:展示了单腿机器人的开发和控制,这是研究多足机器人多样性的一个重要部分。
22. 论文收藏:汇集了一系列优质的研究论文,涵盖了人形机器人领域的前沿进展。
23. 任务优先级和四足机器人:讨论了如何根据任务优先级调整四足机器人的行为策略。
24. 摆动腿轨迹规划:深入研究了摆动腿在四足机器人运动中的关键作用,如何通过优化算法设计有效的轨迹。
25. MPC和WBC权重参数:分析了MPC(模型预测控制)与Whole Body Control(全身体态控制)中权重参数的相互影响,这对控制性能有重大影响。
26. 伺服调参与电机电流环:介绍了电机伺服系统的参数调整,以及电流环在四足机器人控制中的角色。
27. MPC预测单质量系统:探讨了如何利用MPC对单质量系统进行精确预测,以提高机器人响应速度和动态性能。
"人形机器人_31实用知识库分享"是一个丰富而综合的资源,涵盖了从环境部署到高级控制策略的方方面面,对于从事人形机器人研究和开发的专业人士具有很高的参考价值。



2023-11-07 上传
2023-04-27 上传
2023-07-13 上传
2024-05-31 上传
2023-07-12 上传
2024-01-04 上传
2023-07-14 上传
2023-07-13 上传

北极象
- 粉丝: 1w+
- 资源: 377
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
