华为杯研究生数学建模竞赛:多无人机协同干扰雷达的优化策略
版权申诉
该论文探讨了"华为杯"第十届研究生数学建模竞赛中的一个实际问题——多无人机对组网雷达的协同干扰。作者针对复杂的空间动态环境,提出了利用拓扑学的思想构建立体几何模型的方法来解决多无人机的航迹规划和协同策略设计。在这个问题中,关键在于确保每架无人机的飞行路径精确,以避免被组网雷达的"同源检验"机制识破。
文章首先强调了多无人机之间的精确协作至关重要,因为即使微小的航迹偏差也可能导致干扰失败。因此,作者将复杂的三维动态轨迹和空间关系简化为稳定的几何关系,通过这些关系来定义虚假航迹点、信号发射器角色以及雷达点之间的相对位置。这种方法将动态的几何角色转化为具体的四维任务,即在特定时间到达特定位置,以实施干扰。
研究者提出了一种策略,即在高度2.5km的平面上分布无人机,以减少所需无人机的数量。通过利用"距离欺骗"原理,无人机需要在雷达和假目标连线与平面上的交点出现,这种几何特性独立于假目标坐标的变化。通过分析和优化,论文得出结论,在满足平面匀速直线运动的约束下,最少需要31架无人机来生成所有虚假航迹点,并分配合理的任务,使得干扰效果最优化,同时尽量减少无人机的使用。
论文还涉及问题解决的过程,包括数据处理、任务分配和冗余任务的去除,以实现最少无人机的使用。最后,通过这一系列方法,作者成功规划出了每架无人机的航迹和角色,以及如何在特定时刻到达正确的坐标,从而实现了对组网雷达的有效协同干扰。
这篇论文提供了多无人机协同干扰问题的系统性解决方案,展示了拓扑学在无人机路径规划中的应用,以及如何通过优化算法来达到干扰目标的同时降低资源消耗。这对于理解和设计无人机群体的战术行为具有重要的理论和实践价值。
7
3.问题一的建模与求解
3.1 对问题的可视化分析
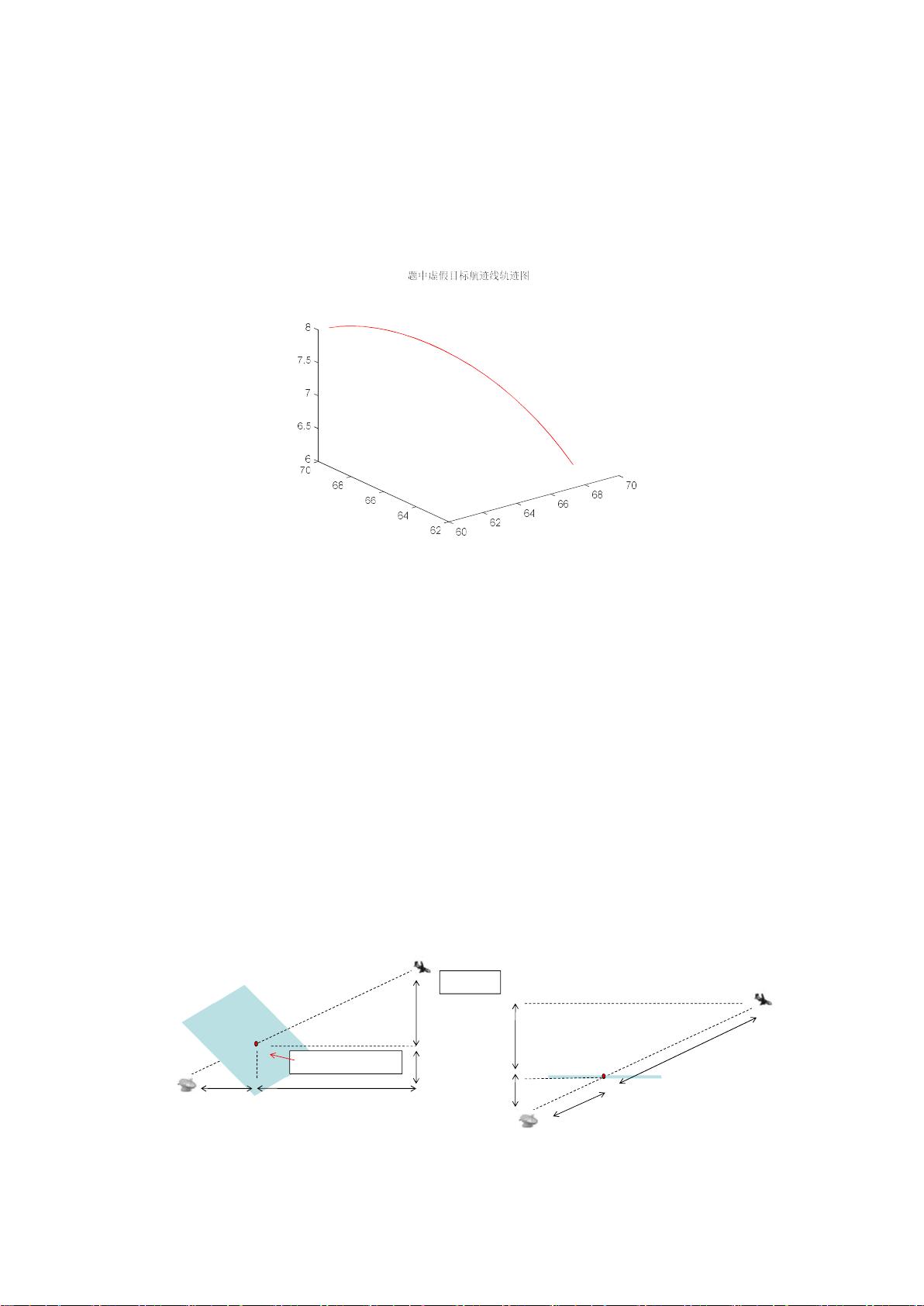
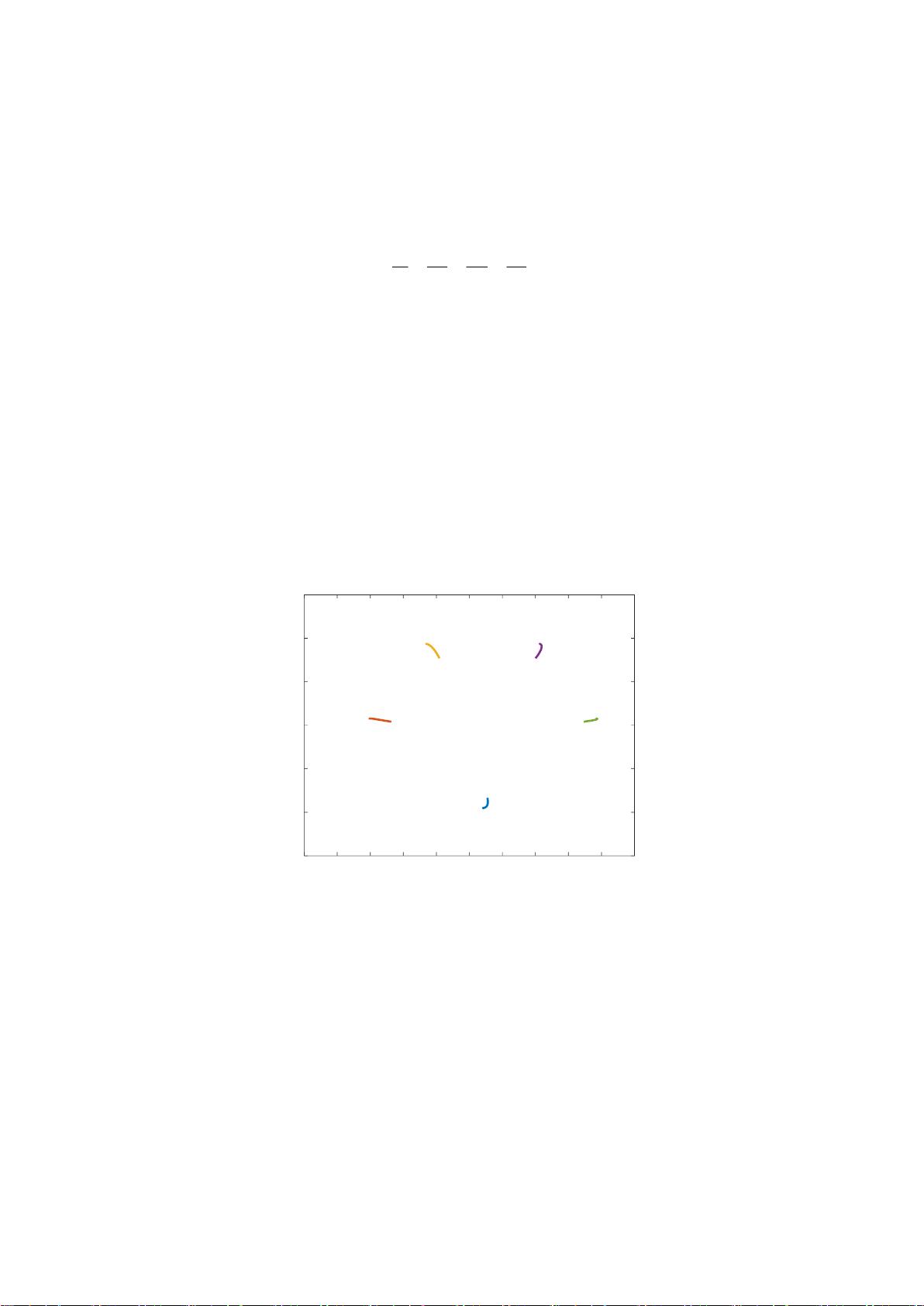
根据附件给出的假目标航迹点,可以绘制出假目标的航迹图如下:
图 3 题目给出的假目标航迹路线示意图
通过观察数据发现,相邻的两个虚假航迹点,在距离上十分接近。倘若无人
机所飞行的平面较低,则会导致任务点与任务点之间的距离太近。而无人机需要
保持高速直线飞行,若要想让两个任务交给同一架飞机来完成,就要求两个任务
在空间上有稍长的距离。为此,提高无人机的飞行平面,规定干扰机均在高度
2.5 千米处实施干扰。
不妨将干扰 1 号雷达的航空区域称为 A 区域,1 号雷达简称为 A 雷达,所在
的坐标定义为 A 点;干扰雷达 2 的航空区域称为 B 区域,2 号雷达简称为 B 雷
达,所在的坐标定义为 B 点;干扰雷达 3 的航空区域成为 C 区域,3 号雷达简称
为 C 雷达,所在的坐标定义为 C 点;干扰雷达 4 的航空区域称为 D 区域,4 号
雷达简称为 D 雷达,所在的坐标定义为 D 点;干扰雷达 5 的航空区域成为 E 区
域,5 号雷达简称为 E 雷达,所在的坐标定义为 E 点。设题目规定的虚拟航线点
为 Q 点。
俯视高度 2.5km 的平面,需要有一台信号发射器扮演这样的角色 M
AQ
,向 A
雷达发射来自虚假目标 Q 的信号。M
AQ
的空间坐标或许一直在变化,但它与周
边图形的关系是稳定的,该点一直都在 AQ 连线与高度 2.5km 平面的交汇处。
假目标
连线与面的交点
x_a x_b
y_a
y_b
z_a
z_b
l_a
l_b
图 4 多无人机协同干扰组网雷达系统示意图
剩余36页未读,继续阅读
2022-05-02 上传
2022-05-02 上传
论文
论文
论文
论文
点击了解资源详情
2023-05-15 上传
2023-06-06 上传

普通网友
- 粉丝: 12w+
- 资源: 9195
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
