喷涂机器人第七轴开发:离线编程技术的新突破
7 浏览量
更新于2024-09-01
1
收藏 739KB PDF 举报
0 引言
在制造业不断追求自动化和智能化的背景下,喷涂机器人扮演着越来越重要的角色,尤其是在面对高温、高压和有毒环境的热喷涂作业中。离线编程技术是提升机器人编程效率和精度的关键,它允许在非现场环境中进行编程,避免中断生产流程,同时通过仿真验证确保程序的准确性和优化生产效率。
1 离线编程技术概述
离线编程与在线编程相比,具有显著优势。在线编程需要机器人在实际工作环境中进行操作,这可能导致生产中断和效率降低。而离线编程则允许在虚拟环境中开发和调试程序,通过三维仿真模拟真实工作场景,从而提前发现并解决问题。目前市场上的主流离线编程软件,如ABB的RobotStudio、KUKA的KUKASimPro、Fanuc的RoboGuide和安川电机的motosim-EG,以及第三方软件RobotArt、RobotMaster、RobotWorks等,为企业提供了丰富的工具集。
2 喷涂机器人轨迹生成
喷涂机器人轨迹生成是离线编程中的关键环节,尤其是对于复杂工件的喷涂,需要精确规划机器人路径以确保涂层均匀。现有的六轴机器人虽然能完成大部分任务,但在处理曲面复杂或工作空间受限的工件时显得力不从心。因此,引入第七轴的概念,旨在扩大机器人可达空间,提高其灵活性和适应性。
3 第七轴的应用
增加第七轴的设计可以改变六轴机器人的运动方式,使得机器人能够适应更多的工作角度和姿态,尤其适用于需要在工件背面或狭小空间内进行喷涂的情况。这种扩展不仅扩展了机器人的运动范围,还提升了对复杂曲面的喷涂质量和精度。
4 实验与比较
通过对比实验,证明了采用第七轴的喷涂机器人在处理复杂曲面时的优越性。与传统六轴方案相比,第七轴方案能够更好地实现均匀喷涂,减少涂层厚度的不一致,更适合实际工业生产需求。
5 结论
基于离线编程技术的喷涂机器人第七轴开发为解决复杂工件喷涂问题提供了一种有效途径。这一创新技术有望推动喷涂机器人在航空航天、生物医疗等领域的广泛应用,并促进喷涂工艺的自动化水平进一步提升。
6 展望
未来的研究将可能聚焦于第七轴的优化设计,提高其动态性能和精度,同时结合人工智能和机器学习技术,实现更智能的轨迹规划和喷涂控制,以应对日益复杂的喷涂工件和更高的工艺要求。
基于离线编程技术的喷涂机器人第七轴开发基于离线编程技术的喷涂机器人第七轴开发
基于离线编程技术的喷涂机器人轨迹生成已成为喷涂机器人控制方法的发展趋势。通过对现有的六轴机器人轨
迹生成方案的分析和研究,提出了在喷涂轨迹设计中增加第七轴的方案。该方案通过改变六轴机器人的运动方
式扩展了机器人的可达空间,使其能够完成复杂工件曲面的喷涂。实验结果表明,与传统的六轴机器人轨迹生
成方案相比,所提出的方案对于复杂曲面的喷涂效果更好,更适于实际工业应用。
0 引言引言
随着“中国制造2025”的进一步深化,行业自动化生产线的改造将朝着智能化生产方向发展,而这其中工业机器人的行业应用
开发至关重要
[1]
。由于热喷涂的工况极其恶劣,通常伴随有高温、高压、有毒气体,而且工艺上对工件上涂层厚度的均匀度有
着很高的要求,因此机器人已被广泛用于热喷涂生产中,代替人工以保证涂层的质量与喷涂的效率。
工业机器人编程主要有在线编程(On-line Programming)和离线编程(Off-line Programming)两种方式
[2]
。与在线编程相
比,离线编程技术可以脱离现场环境进行机器人控制程序开发,无需中断生产,同时通过离线的仿真验证和优化,提高生产效
率和质量。因此,国外许多机器人制造厂商均为自己生产的机器人提供了离线编程仿真软件,如瑞典ABB 公司的Robot
Studio、德国KUKA公司的KUKA SimPro、日本Fanuc公司的RoboGuide、日本安川公司的motosim-EG等。也有一些自动化
系统集成商提供了Robot Art、Robot Master、Robot Works等第三方工业机器人的离线编程软件
[3-5]
。
对于喷涂机器人离线编程的研究中,喷涂机器人喷涂轨迹生成与优化是一个非常具有挑战的难题
[6]
。国内外主流的离线编程
软件的发开商和机器人制造厂商只是提供一个离线编程开发平台或仅仅针对一些普通行业提出了相关解决方案,并未给喷涂这
类特殊行业提供专门方案设计。目前,喷涂机器人喷涂轨迹生成与优化的研究大多来自于高校或者研究所,研究成果也集中在
根据喷枪和涂料的特性建立喷涂模型、根据机器人运动学特点设计和优化喷涂轨迹生成算法和碰撞检测算法等方面
[7-9]
。
随着喷涂技术越来越多应用于航天航空、生物医疗等领域,喷涂工件也越来越复杂,例如,喷涂在工件的背面或喷涂在一
个狭窄的工作腔体内,而现有的方案都是基于六轴机器人提出的,由于机器人工作空间的限制,仅能完成一些较为简单或者单
一的工件曲面的喷涂轨迹,不能用于上述的复杂场景。因此,本文提出在喷涂轨迹设计中在外部增加机器人第七个旋转轴的方
案,通过改变六轴机器人的运动方式扩展机器人的可达空间,克服机器人在热喷涂过程中轴的运动限制,使其能够完成复杂工
件曲面的喷涂。
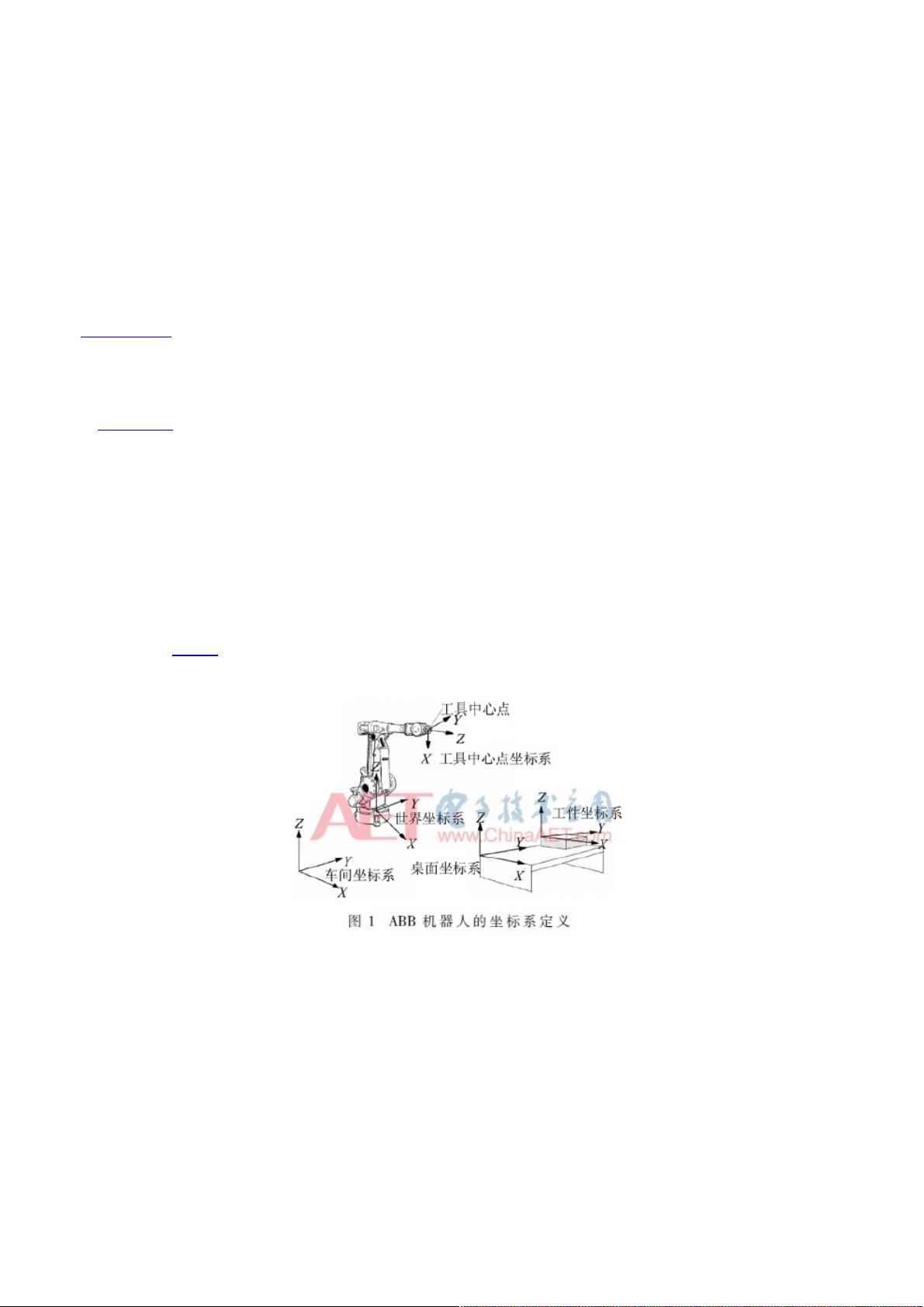
1 喷涂机器人的坐标体系喷涂机器人的坐标体系
为了更好地理解第七轴的运动特性,首先必须引入机器人的坐标系统。在机器人系统,机器人程序中的所有位置存储相关
系统的笛卡尔坐标系。本文讨论的对象是ABB六轴机器人,图1是坐标系定义
[10]
。
在机器人轨迹设计中,轨迹被定义为工具中心点(Tool Center Point,TCP)的移动路径。在喷涂中,工具中心点一般定义
在喷枪嘴的正前方对喷涂表面产生影响位置。因此,喷涂轨迹上每个点的位置实际就是工具中心点的位置,也就是说机器人的
位置及其运动总是与工具中心点相联系。在机器人编程中,通常使用坐标系或用户定义的坐标系进行元素和对象的相互关联。
机器人通常包括世界坐标系、基座坐标系、用户坐标系和对象坐标系
[8]
。
2 喷涂机器人第七轴的选择喷涂机器人第七轴的选择
目前在喷涂行业,主要采用六轴机器人进行喷涂。以ABB六自由度的关节型工业机器人IRB2400/16为例,其机身结构图如
图2所示
[11]
。
下载后可阅读完整内容,剩余7页未读,立即下载
2021-08-14 上传
2023-02-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-09-30 上传
点击了解资源详情
点击了解资源详情

weixin_38514805
- 粉丝: 9
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
