智能车电机控制策略:PID与鲁棒控制结合
需积分: 50 69 浏览量
更新于2024-07-28
收藏 807KB PDF 举报
"飞思卡尔算法 - 智能车多类算法总结,涉及电机控制策略"
飞思卡尔算法主要应用于智能车的控制领域,特别是针对电机控制策略的优化。在这个领域,智能车的性能和效率往往取决于其软件设计,尤其是速度控制的精度。本资源的描述集中于电机控制,这是智能车控制系统的核心部分。
1. 直流电机控制策略:智能车的速度控制是一个大惯性系统的挑战,因为电机输出力与车速并不成直接比例关系。在启动和匀速行驶时,电机输出与速度的关系是非线性的。此外,电池电量和车体重量也会影响车速。因此,采用闭环控制是必要的,以确保对车速的精确控制。
2. PID与鲁棒控制结合:在速度控制中,通常选择PID(比例-积分-微分)控制器,因其对系统动态响应有良好的调节效果。考虑到速度控制通道的时间滞后较小,PID控制方案适用。在加减速过程中,引入"棒棒控制"来改善瞬态性能。PID控制的公式包含积分、比例和微分三个部分,但在大惯性系统中,积分项可省略,变为PD控制。同时,结合鲁棒控制思想,当误差较大时,通过增大控制输出迅速减小误差,保证系统的稳定性。
3. 弯道速度控制:在智能车进入弯道时,为保持稳定,需要进行减速控制。减速策略是在直道速度基础上降低设定值,确保安全过弯。弯道后,通过适当调整车速,使模型车能保持较好的姿态,避免左右摆动,高效通过弯路。
4. 重要性:电机控制策略直接影响着智能车的整体性能,包括行驶速度、稳定性以及比赛成绩。一个优化的控制策略能确保智能车在短时间内以最佳状态完成比赛,从而在竞争激烈的智能车竞赛中脱颖而出。
总结来说,飞思卡尔算法在智能车领域的应用着重于通过精准的电机控制策略,实现对车速的有效管理和控制,特别是在弯道驾驶中的动态调整,以提升车辆的行驶性能和比赛表现。这样的算法设计体现了信息技术在解决实际工程问题中的关键作用。
第五章 智能汽车软件设计
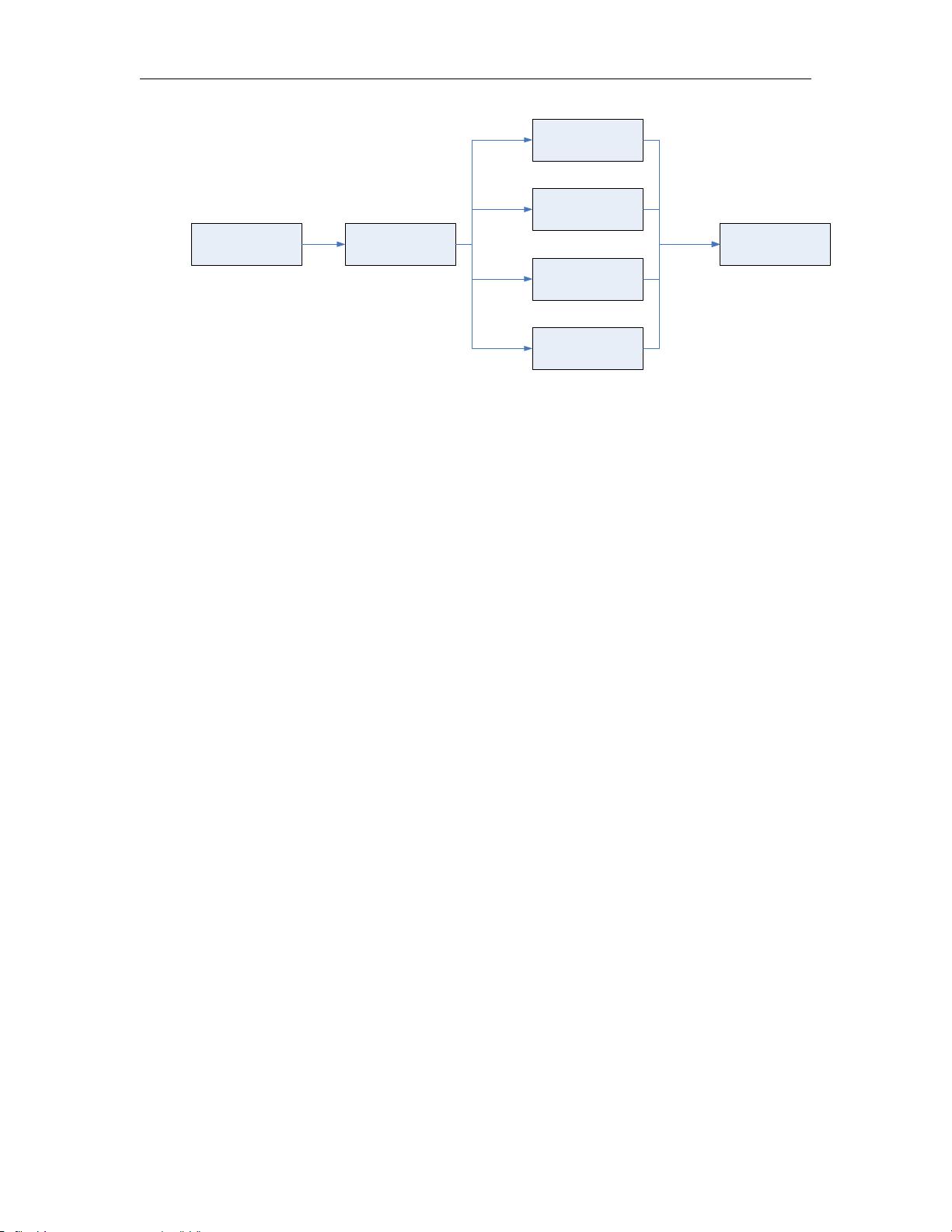
参数建表 路径判别
直道对应
参数及算法
弯道对应参
数及算法
小 S 道对应
参数及算法
大 S 对应参数
及算法
舵机打角
直道
弯道
小 S
大 S
图 5.10 路径规划示意图
1.7.
1.7.
1.7.
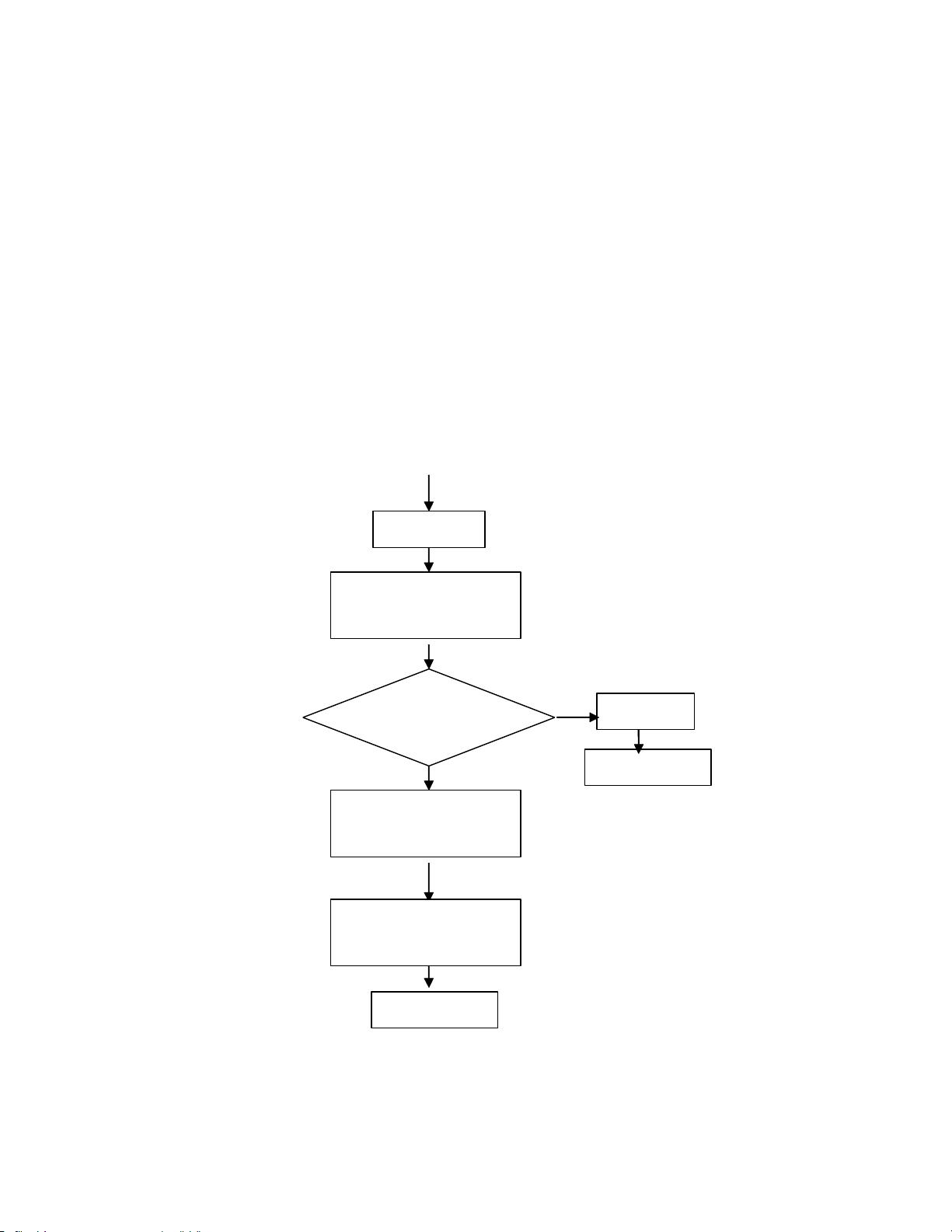
1.7. 偏航距离的计算
偏航距离的计算
偏航距离的计算
偏航距离的计算
由于已经获得了赛道中心线的位置 , 所以计算偏航距离的问题是选取何处的中
心线的距离为当前的偏航距离。控制算法的执行周期为 40ms ,如果赛车的速度 为
2m/s
,则在两次控制算法的执行中间,赛车要前进
8cm
,赛车所处的环境将发生比
较大的改变,所以赛车的控制只能算是半实时控制,这是所有使用摄像头作为主要
寻线传感器的参赛队都避免不了的问题。因为算法的滞后性,赛车需要将 “ 当前位
置 ” 进行适当前移。前移量应该跟赛车当前速度成正比,但实际中我们发现,适当

剩余68页未读,继续阅读
2018-10-23 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-04-07 上传
2015-11-26 上传
2011-11-05 上传

lianjieshibai0
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- NTFS和FAT32的区别.doc
- 双向转发检测BFD技术白皮书
- Vim实用技术-技巧、插件和定制
- 客房管理系统论文—计算机系毕业论文
- ant中文开发指南.pdf
- jsp 转发和重定向的区别(forward sendRedicreat)
- ARM嵌入式WINCE实践教程
- a byte of python-python最佳入门教材
- ARM开发工程师入门秘籍
- LinuxUnix下ODBC的安装、配置与编程.doc
- VC开发MySQL数据库专题
- 香港科大数字图像处理
- UBB语法UBB语法UBB语法
- 数字图像处理基础知识
- DataTable,DataView和DataGrid中一些容易混淆的概念
- 显示系统时钟(汇编)
