异构多核运动控制器:高速接口与固件设计
172 浏览量
更新于2024-09-01
收藏 355KB PDF 举报
"基于异构多核运动控制器的高速接口设计"
在嵌入式运动控制领域,异构多核架构已经成为提升系统性能的关键技术。本文针对现有的控制器在数据通信接口方面的不足,提出了一种基于OMAPL138+FPGA的异构多核运动控制器设计方案,该控制器核心由集成ARM9和DSP C6748的OMAPL138处理器构成。ARM9处理器负责运行Linux操作系统,以实现多任务的高效协调,而无操作系统的DSP则确保了实时计算性能。
高速接口设计是本文的重点,主要包括ARM与DSP之间的通信、DSP与FPGA的连接以及控制器与个人计算机(PC)的交互。ARM与DSP的通信通常涉及复杂的同步和数据交换机制,为了优化这一过程,可以采用特定的协议和硬件支持,如共享内存、DMA(直接存储器访问)等,以减少CPU干预,提高数据传输速率。另一方面,DSP与FPGA之间的接口设计可能涉及到FPGA的逻辑配置,例如通过配置FPGA中的双端FIFO(先进先出缓冲区)来实现高效的数据流控制。
FPGA在运动控制中的作用主要是实现高速IO扩展和定制逻辑,它可以快速响应并处理实时控制信号。对于控制器与PC的通信,传统的低速串行接口如RS232已经无法满足高速数据传输的需求,因此,通常会采用USB、以太网或更高速的串行总线如PCIe,以实现大吞吐量的通信。
文中提到的TI OMAPL138处理器,结合了ARM和DSP的优势,是多核协同处理的理想选择。SysLink组件的使用使得双核间的通信更为简洁,降低了软件设计的复杂度。然而,引入操作系统可能会影响DSP的实时性能,因此在设计时需要权衡实时性和多任务处理能力。
本文提出的异构多核运动控制器通过优化通信接口,提高了数据交换速率和系统的稳定性,为其他类似设计提供了有价值的参考。未来的研究可能涉及更复杂的多核架构、更高的通信带宽以及更优化的固件设计,以适应更加复杂和多样化的需求。这样的设计趋势将推动嵌入式运动控制系统的性能边界,满足智能制造领域日益增长的高性能要求。
基于异构多核运动控制器的高速接口设计基于异构多核运动控制器的高速接口设计
随着制造领域对嵌入式运动控制系统应用范围的扩大,基于异构多核的嵌入式控制器必为重要发展方向之一。
首先说明异构多核控制器取得成效,以及现有控制器在数据通信接口方面存在缺陷。本设计运动控制器以异构
处理器——OMAPL138+FPGA为核心,OMAPL138内部集成ARM9和DSP C6748处理器核。ARM9内嵌Liunx操
作系统,以增强控制器多任务协调能力;DSP不运行操作系统,可保证运算实时性。重点阐述ARM与DSP、
DSP与FPGA以及控制器与PC之间通信的高速接口设计和固件设计。通过实验表明:该运动控制器数据交换速
率高,吞吐量大,稳定性高,为异构多核控制器高速通信接口提供参考。
0 引言引言
在嵌入式运动控制系统中,无论是ARM
[1]
、DSP
[2]
还是FPGA
[3]
都拥有着不可替代的地位。ARM处理器与运动控制芯片结
合,实现了高精度四轴运动控制器
[1]
。文献[2]采用DSP+FPGA构建完成六轴焊锡机器人控制,DSP主要完成运动控制算
法,FPGA完成精插补以及IO扩展。文献[3]利用ARM较强人机接口能力、DSP的计算能力以及FPGA的接口扩展灵活性,完成
CNC系统的优异控制。
随着制造领域对嵌入式运动控制系统应用范围的扩大,要求控制系统能在复杂环境下完成多种不同的任务
[4]
,多核协同处理
必将成为嵌入式控制系统的发展方向。多核协同处理的数据交互效率都必将影响到整个控制系统的性能,文献[2]在FPGA中开
辟双端FIFO接口实现DSP与FPGA之间进行数据交互,双端FIFO大小之间关系到数据交互的效率;文献[3]中ARM与DSP之间
采用一片大容量FPGA作为桥梁,并对ARM和DSP进行分别编址,软件设计要求提高,增加硬件成本和PCB板布线难度,通
信稳定性也不可保障;文献[5]中对于DSP与ARM之间通过外扩接口通信,且控制器与外界通信采用通信速率较低的RS232方
式,影响控制系统的控制效率
[5]
。
随着微电子技术的快速发展,单硅片内可嵌多个处理器核,比如TI公司推出多核处理器OMAPL138。采用OMAPL138完成
了数字接收机高速接口设计
[6]
,在RAM与DSP之间采用支持双操作系统通信的SysLink组件,调用该组件的APP函数完成双核
通信,简化双核通信复杂性。DSP引入操作系统,削弱运算能力。本文采用OMAPL138+FPGA为核心处理器,ARM9运行
Linux系统,完成系统多任务切换和管理;DSP不运行操作系统,保证DSP计算实时性,双核通信由共享内存空间;FPGA主
要产生脉冲信号以及IO口扩展。文中详细阐述PC与ARM、ARM与DSP以及DSP与FPGA之间通信接口设计和固件设计。
1 系统设计方案系统设计方案
本系统采用OMAPL138+FPAG作为嵌入式运动控制器核心,OMAPL138是一款异构多核处理器,内部集成ARM9和DSP
C6748内核
[7]
。ARM9可以植入嵌入式系统Linux,完成任务调度,增强控制器多任务的协同处理能力;DSP C6748具有硬件
乘法器,采用128 bit位宽的超强指令集(VLIW)读写指令,可完成复杂算法;FPGA具有丰富IO资源和并行处理能力,方便
脉冲信号产生,实现多电机同步控制。
控制器与外界通信主要有两个接口:以太网和串行通信口(UART),以太网主要用于远距离传输,UART主要用于Linux系
统移植时提示信息和系统运行状态信息的输出。ARM与DSP之间通过共享内存空间完成数据交互,稳定性高,通信所用时间
可以忽略不计
[8]
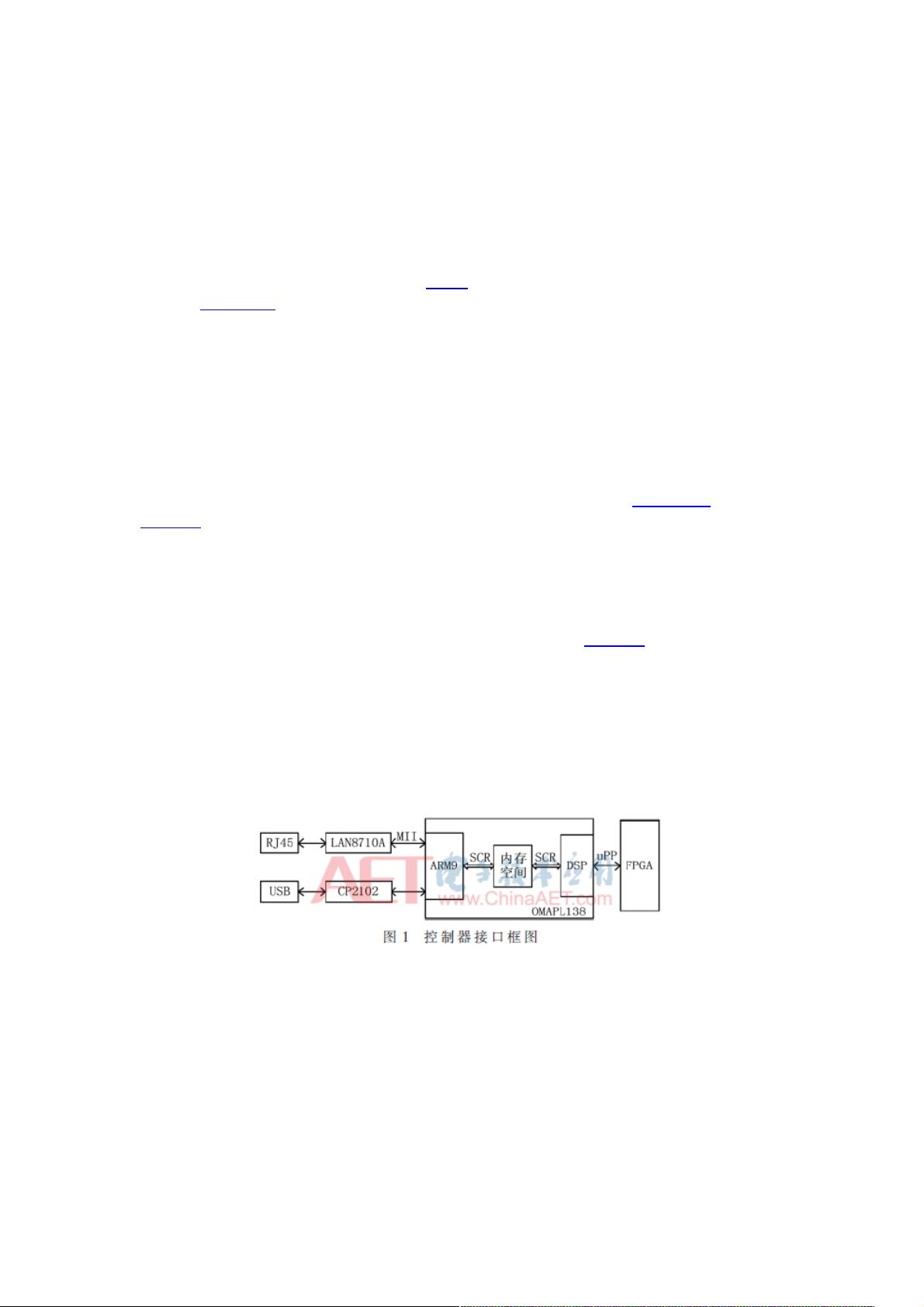
。DSP与FPGA之间通过uPP高速并行接口,当OMAPL138时钟频率为456 MHz时,uPP接口时钟频率可以达
到114 MHz,控制器高速接口框图如图1所示。
图1可以看出,控制器与外界通信使用的PHY芯片有LAN8710A和CP2102,LAN8710A主要用于网络通信中MAC与网络层
之间互联,CP2102主要实现USB2.0与串行通信口(COM)之间通信协议转换,ARM9与DSP之间通过OMAPL138内部交互
中心资源(SCR)总线完成数据交互。
1.1 PC与与ARM通信通信——网络通信网络通信
PC与控制器接口通过网络实现,由网络接口RJ45完成数据交互。嵌入式系统中,常用的TCP/IP网络协议为4层,简化原
OSI的7网络协议层,4层协议分别为应用层、网络层、传输层以及物理层。系统中由OMAPL138集成EMAC模块实现数据链路
层,物理层使用Microchip公司的专用PHY芯片LAN7810A实现。LAN8710A具有高性能、小封装、低功耗等特性,广泛应用于
商业、工业类电子产品以及消费类电子产品中。符合IEEE802.3标准,支持自协商机制,可自行裁定通信速率和传输模式。
LAN8710A与OMAPL138集成外部接口MII互联,硬件连接图如图2所示。LAN8710A外接时钟25 MHz,通过内部PLL倍频
到100 MHz,提供发送和接收数据时钟MII RXCLK和MII TXCLK,JRJ-138EHNL是内嵌LED指示灯和网络变压器的RJ45接
口,在PCB设计需要考虑:10/100 MB/s网络传输4根线为2组差分信号,PCB走线需要按照差分规则,阻抗匹配为100 ?赘;
MII RXD[3..0]和MII TXD[3..0]两组线需并行走线。
下载后可阅读完整内容,剩余4页未读,立即下载
2020-08-26 上传
2023-05-10 上传
2023-04-23 上传
2023-05-11 上传
2023-08-23 上传
2023-04-01 上传
2023-06-11 上传
2023-05-22 上传
2023-09-12 上传

weixin_38689922
- 粉丝: 6
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
