逆深度参数化单目SLAM:实时3D地图构建详解
本论文深入探讨了视觉单目SLAM(Visual Mono-SLAM)算法,该算法由Davison等人开发,用于实时从手持单眼相机捕捉的图像中创建稀疏且一致的3D地图。论文的作者Sven Albrecht在2009年撰写硕士论文时,对单目SLAM的工作原理进行了详细的剖析。
首先,论文介绍了相机模型和镜头畸变的基础知识,这对于理解单目SLAM的实施至关重要。摄像机模型描述了像素如何映射到三维空间中的真实世界坐标,而镜头畸变校正是为了纠正由于光学元件变形导致的图像失真,确保测量的精度。
接着,作者重点讲解了扩展卡尔曼滤波器(Extended Kalman Filter,EKF)的应用。EKF是一种在存在噪声和不确定性的情况下进行状态估计的有效工具,它不仅能够提供摄像机的6度自由度(6DOF)姿态估计,即位置和旋转,还能为特征点在3D坐标系下的位置估计提供可靠的方法。
在单目SLAM中,一个关键的创新是引入了逆深度编码。传统的SLAM通常依赖于深度信息来估计场景的立体结构,但在单眼相机下,缺乏直接的深度测量使得初始特征点定位变得困难。通过逆深度编码,论文提出了一种方法,即使在深度未知的情况下,也能立即初始化特征点的位置,这对于处理远距离或模糊的图像特征尤其有用。
论文展示了这种逆深度编码在实际应用中的有效性,即使面对深度较大的特征点,也能保持良好的性能。这表明该方法对于单目SLAM的鲁棒性和实用性具有重要意义,尤其是在资源受限的便携式设备上,逆深度编码能简化深度估计过程,提高实时性能。
这篇论文深入研究了视觉单目SLAM的内在机制,并通过逆深度编码技术优化了特征点的初始化过程,为单眼相机在移动机器人、增强现实(AR)和虚拟现实(VR)等领域中的应用提供了有价值的研究成果。

10 CHAPTER 2. CAMERA
X
c
Y
c
Z
c
f
O
R
U
V
α
v
α
u
O
image
O
scene
image sensor
field of view
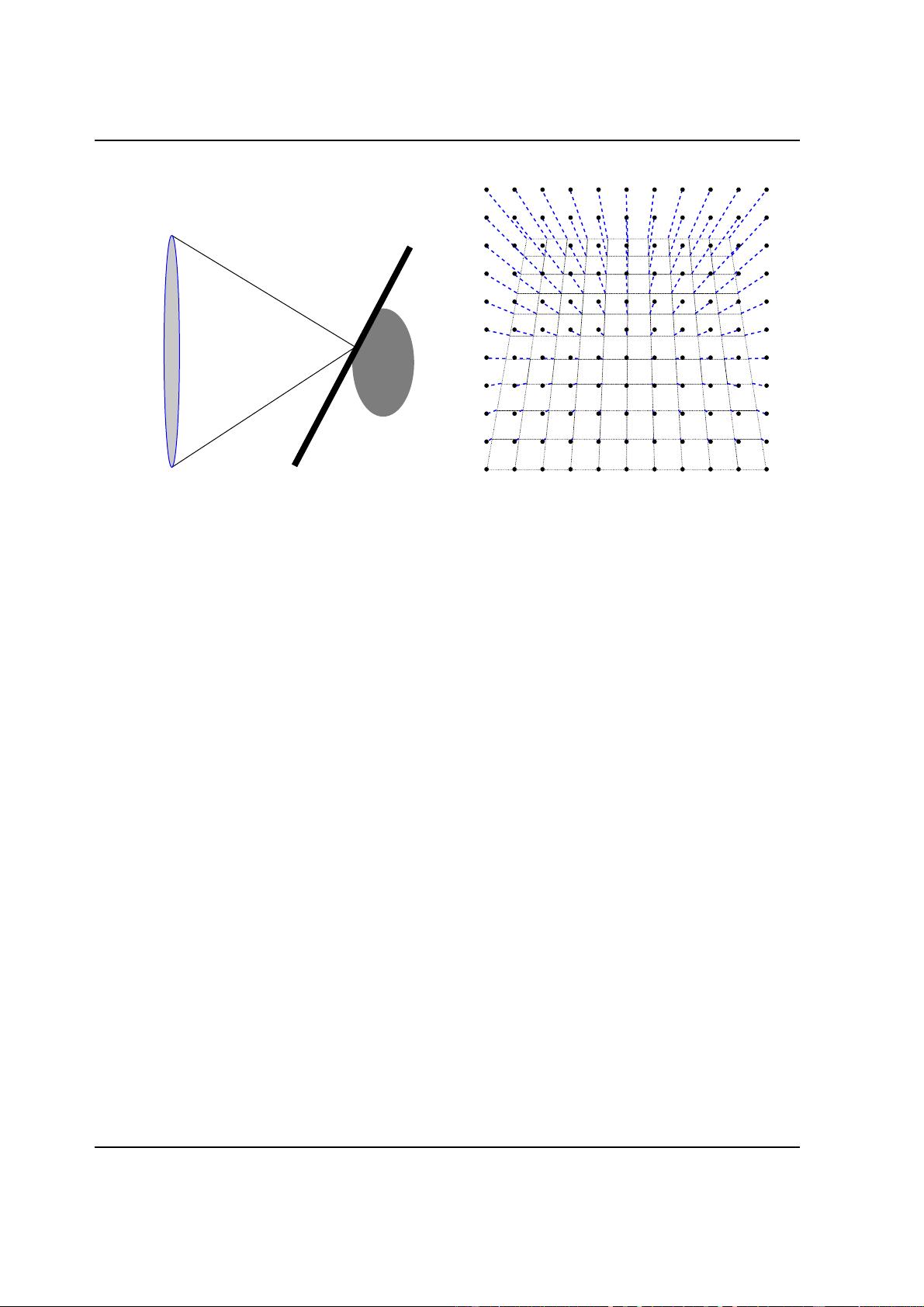
Figure 2.4: Field of View. The boundaries of the field of view, determined by the size of the image sensor are
depicted in blue. The resulting volume could be extended further in direction of the positive X
c
and is just cut
for visualization purposes. The corresponding angles, defining the field of view are labeled as α
u
and α
v
(see
equations (2.3) and (2.4)), respectively. Please note that the origin for the resulting image (its upper left corner) is
placed at O
image
which is inverted from its corresponding real world position O
scene
.
2.2 A Simple Distortion Model
Section 2.1.2 introduced a first step to adapt the basic pinhole camera model to represent real cameras
more closely, by means of the field of view and the adaption of the origin to reflect digital image sen-
sors. However the adaptions discussed so far still describe a “perfect” camera. Each real camera tends
to have its own unique imperfections, introduced by imperfect manufacturing and assembly processes.
Especially in the low-cost sector individual cameras of the same type tend to vary in their camera proper-
ties. One possible error induced by the manufacturing process is depicted in Figure 2.5, where the image
sensor is not aligned perfectly parallel to the camera lens.
Since the displacement of the image sensor is unique for each produced camera a way to analyze
the inherent distortions and to model them is needed. A first step is to further modify equation (2.6).
Equation (2.6) implies that the center of the image sensor is placed precisely at the ideal image center
R which is the intersection with the Z
c
-axis and the image plane. Considering the CMOS sensor of
the HERCULES WebCam Classic with size 3.6 mm × 2.7 mm yields 640 ×480 pixels of resolution, the
physical size for the sensor of one pixel on the chip is 0.005625 mm × 0.005625 mm = 5.625 µm ×
5.625 µm. So any displacement larger than
5.625
2
µm would mean that (2.6) is not accurate, still assuming
that the image sensor is perfectly parallel to the pinhole plane. If however the displacement of the center
of the image sensor is known, the adaption of (2.6) becomes quite simple:
u
d,i
v
d,i
!
=
f
u
x
i
z
i
+ u
0
f
v
y
i
z
i
+ v
0
!
(2.7)
where u
0
and v
0
denote the image coordinate, which corresponds to the image center R. Similar to
AN ANALYSIS OF VISUAL MONO-SLAM

剩余98页未读,继续阅读
2021-02-05 上传
2024-01-05 上传
2024-01-05 上传
2023-02-06 上传
2023-05-28 上传
2023-06-28 上传
2023-05-11 上传
2023-06-28 上传

小西服红色
- 粉丝: 24
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
