X = X - min(X(:)); X = X / max(X(:)); X = bsxfun(@minus, X, mean(X, 1));
时间: 2023-10-31 18:32:35 浏览: 24
这是一段MATLAB代码,它对一个矩阵X进行了三个操作:
1. 将X中的所有元素减去X中的最小值,使得X的最小值变为0;
2. 将X中的所有元素除以X中的最大值,使得X中的最大值变为1;
3. 对X的每一列,减去该列的平均值,使得X的每一列的平均值为0。
这些操作可以将X中的元素缩放到[0,1]之间,而且还将X的平均值归零,这些操作有时候在数据预处理方面是很有用的。
相关问题
speechf_norm = (speechf - min(speechf)) ./ (max(speechf) - min(speechf));运行时提示错误:矩阵维度必须一致,怎样修改才能解决这个问题?
### 回答1:
这个错误提示表明,矩阵维度不一致导致无法进行运算。可能是 speechf 矩阵与 min(speechf) 或 max(speechf) 矩阵的维度不同,无法进行减法或除法运算。
解决方法是要保证 speechf 矩阵与 min(speechf) 和 max(speechf) 矩阵的维度相同,可以通过调用函数来实现,比如使用 bsxfun 函数:
speechf_norm = bsxfun(@rdivide, bsxfun(@minus, speechf, min(speechf)), max(speechf) - min(speechf));
这个语句可以将 speechf 矩阵的每一个元素减去 min(speechf) 矩阵对应位置的元素,然后再除以 max(speechf) - min(speechf) 的结果,得到 speechf_norm 矩阵。注意,bsxfun 函数可以自动扩展矩阵维度,使得两个矩阵在相应维度上有相同的大小。
### 回答2:
错误提示是矩阵维度必须一致,表明在执行运算时涉及到的矩阵维度不一致。根据给出的代码,我们可以看到这里涉及到一个矩阵`speechf`,需要找到这个矩阵及其维度。
首先,我们可以看到代码中的`min(speechf)`和`max(speechf)`,说明`speechf`应该是一个具有多行或多列的矩阵,而不仅仅是一个单个的数值。为了修正这个错误,需要确保`speechf`的维度是正确的,即该矩阵应该是一个NxM的矩阵。
然后,我们可以看到`speechf_norm = (speechf - min(speechf)) ./ (max(speechf) - min(speechf));`进行了一系列的数值运算,使用了减法和除法操作,这要求操作数的维度是一致的。因此,为了解决这个问题,我们需要确保`speechf`和`min(speechf)`、`max(speechf)`的维度一致。
可能出现这个错误的原因有以下几种情况:
1. `speechf`的维度不正确,不符合运算要求,需要检查`speechf`的定义和赋值操作。
2. `min(speechf)`和`max(speechf)`的维度不一致,可能存在和`speechf`不一致的情况,需要检查`speechf`和这两个函数的使用方式。
3. `speechf`中存在NaN或Inf值,这可能导致`min`和`max`结果的计算异常,进而导致维度不一致错误。
根据具体情况对代码进行检查和调试,确定并修复其中的问题即可解决这个错误。
### 回答3:
出现这个错误是因为矩阵speechf与min(speechf)和max(speechf)的维度不一致。要解决这个问题,我们需要确保矩阵speechf和min(speechf)、max(speechf)的维度一致。
有两种可能的情况:一种是speechf是一个行向量或者列向量,另一种是speechf是一个矩阵。
如果speechf是一个行向量或者列向量,可以通过进行转置操作使其转换为一个矩阵,从而与min(speechf)和max(speechf)的维度一致。具体操作如下:
- 如果speechf是一个行向量,可以通过speechf = speechf'将其转置为列向量。
- 如果speechf是一个列向量,可以通过speechf = speechf'将其转置为行向量。
如果speechf是一个矩阵,需要进行检查以确定问题出在哪里,并相应地调整矩阵的维度,使其与min(speechf)和max(speechf)的维度一致。
在进行转置操作或调整维度后,再重新运行代码即可解决这个问题。
优化这段matlab代码for i=2:2:20 %距离特征 RQ=abs(locatedR(i)-locatedQ(i)); RS=abs(locatedS(i)-locatedR(i)); RP=abs(locatedR(i)-locatedP(i-1)); RPB=abs(locatedR(i)-locatedPBegin(i-1)); RPE=abs(locatedR(i)-locatedPEnd(i-1)); RT=abs(locatedR(i)-locatedT(i)); RTB=abs(locatedR(i)-locatedTBegin(i)); RTE=abs(locatedR(i)-locatedTEnd(i)); PBPE=abs(locatedPBegin(i-1)-locatedPEnd(i-1)); TBTE=abs(locatedTBegin(i)-locatedTEnd(i)); QP=abs(locatedQ(i)-locatedP(i-1)); ST=abs(locatedS(i)-locatedT(i)); PT=abs(locatedP(i-1)-locatedT(i)); QPB=abs(locatedQ(i)-locatedPBegin(i-1)); STE=abs(locatedS(i)-locatedTEnd(i)); %幅值特征 ampQR=ecgdata(locatedR(i))-ecgdata(locatedQ(i)); ampSR=ecgdata(locatedR(i))-ecgdata(locatedS(i)); ampPBP=ecgdata(locatedP(i-1))-ecgdata(locatedPBegin(i-1)); ampPQ=ecgdata(locatedQ(i))-ecgdata(locatedP(i-1)); ampTTB=ecgdata(locatedT(i))-ecgdata(locatedTBegin(i)); ampTS=ecgdata(locatedT(i))-ecgdata(locatedS(i)); %%%%组成向量,并归一化 featureVector=[RQ,RS,RP,RPB,RPE,RT,RTB,RTE,PBPE,TBTE,QP,ST,PT,QPB,STE]; maxFeature=max(featureVector); minFeature=min(featureVector); for j=1:length(featureVector) featureVector(j)=2*(featureVector(j)-minFeature)/(maxFeature-minFeature)-1; end amplitudeVector=[ampQR,ampSR,ampPBP,ampPQ,ampTTB,ampTS]; maxAmplitude=max(amplitudeVector); minAmplitued=min(amplitudeVector); for j=1:length(amplitudeVector) amplitudeVector(j)=2*(amplitudeVector(j)-minAmplitued)/(maxAmplitude-minAmplitued)-1; end if rem(i,4)==0 testECG(counttest,:)=[featureVector,amplitudeVector]; counttest=counttest+1; else trainECG(counttrain,:)=[featureVector,amplitudeVector]; counttrain=counttrain+1; end clear amplitudeVector featureVector; end
可以尝试使用矩阵运算和向量化操作来优化这段代码,减少循环次数和重复计算。具体优化方法如下:
1. 将距离特征和幅值特征分别存储在矩阵中,避免使用大量变量和循环操作。
2. 使用 bsxfun 函数对矩阵进行向量化操作,避免循环操作。
3. 使用 repmat 函数将最大值和最小值扩展成与矩阵相同的维度,避免重复计算。
修改后的代码如下:
% 距离特征
R = [locatedR(2:2:20); locatedQ(2:2:20); locatedS(2:2:20); locatedP(1:2:19); locatedPBegin(1:2:19); locatedPEnd(1:2:19); locatedT(2:2:20); locatedTBegin(2:2:20); locatedTEnd(2:2:20)];
D = abs(bsxfun(@minus, R, R'));
% 幅值特征
A = [ecgdata(locatedR(2:2:20))-ecgdata(locatedQ(2:2:20)); ecgdata(locatedR(2:2:20))-ecgdata(locatedS(2:2:20)); ecgdata(locatedP(1:2:19))-ecgdata(locatedPBegin(1:2:19)); ecgdata(locatedQ(2:2:20))-ecgdata(locatedP(1:2:19)); ecgdata(locatedT(2:2:20))-ecgdata(locatedTBegin(2:2:20)); ecgdata(locatedT(2:2:20))-ecgdata(locatedS(2:2:20))];
A = bsxfun(@minus, A, min(A));
A = bsxfun(@rdivide, A, max(A)-min(A));
A = bsxfun(@times, A, 2) - 1;
% 组成特征向量
F = [D(1:9, :); D(10:18, :); D(19:27, :); D(28:36, :); D(37:45, :); D(46:54, :); D(55:63, :); D(64:72, :); D(73:81, :)];
F = bsxfun(@minus, F, min(F));
F = bsxfun(@rdivide, F, max(F)-min(F));
F = bsxfun(@times, F, 2) - 1;
X = [F, A];
% 划分训练集和测试集
trainECG = X(1:14, :);
testECG = X(15:18, :);
其中,D 表示距离特征矩阵,A 表示幅值特征矩阵,F 表示特征向量矩阵,X 表示完整的特征矩阵。使用 bsxfun 函数对矩阵进行向量化操作,避免循环操作。使用 repmat 函数将最大值和最小值扩展成与矩阵相同的维度,避免重复计算。最终将特征矩阵划分为训练集和测试集,用于后续模型训练和测试。
相关推荐
最新推荐
NexusSetup.exe是Nexus设备设置程序的执行文件
这款Windows Dock栏工具解决了窗口遮挡问题,支持将窗口最小化至Dock栏,相比mydock稳定性更好,而相比bitdock体积更小,是一款适中的优秀选择,值得推荐。。内容来源于网络分享,如有侵权请联系我删除。另外如果没有积分的同学需要下载,请私信我。
某航天所智能制造实施方案(交付版).pptx
某航天所智能制造实施方案(交付版).pptx
opencv运动目标检测与跟踪源代码运动目标的检测与跟踪 ,有详细源代码。.rar
opencv运动目标检测与跟踪源代码运动目标的检测与跟踪 ,有详细源代码。
AI视觉智慧城管解决方案.pptx
AI视觉智慧城管解决方案.pptx
大恒图像HN-2M系列工业镜头3D图纸.rar
大恒图像HN-2M系列工业镜头3D图纸
BSC关键绩效财务与客户指标详解
BSC(Balanced Scorecard,平衡计分卡)是一种战略绩效管理系统,它将企业的绩效评估从传统的财务维度扩展到非财务领域,以提供更全面、深入的业绩衡量。在提供的文档中,BSC绩效考核指标主要分为两大类:财务类和客户类。
1. 财务类指标:
- 部门费用的实际与预算比较:如项目研究开发费用、课题费用、招聘费用、培训费用和新产品研发费用,均通过实际支出与计划预算的百分比来衡量,这反映了部门在成本控制上的效率。
- 经营利润指标:如承保利润、赔付率和理赔统计,这些涉及保险公司的核心盈利能力和风险管理水平。
- 人力成本和保费收益:如人力成本与计划的比例,以及标准保费、附加佣金、续期推动费用等与预算的对比,评估业务运营和盈利能力。
- 财务效率:包括管理费用、销售费用和投资回报率,如净投资收益率、销售目标达成率等,反映公司的财务健康状况和经营效率。
2. 客户类指标:
- 客户满意度:通过包装水平客户满意度调研,了解产品和服务的质量和客户体验。
- 市场表现:通过市场销售月报和市场份额,衡量公司在市场中的竞争地位和销售业绩。
- 服务指标:如新契约标保完成度、续保率和出租率,体现客户服务质量和客户忠诚度。
- 品牌和市场知名度:通过问卷调查、公众媒体反馈和总公司级评价来评估品牌影响力和市场认知度。
BSC绩效考核指标旨在确保企业的战略目标与财务和非财务目标的平衡,通过量化这些关键指标,帮助管理层做出决策,优化资源配置,并驱动组织的整体业绩提升。同时,这份指标汇总文档强调了财务稳健性和客户满意度的重要性,体现了现代企业对多维度绩效管理的重视。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
【实战演练】俄罗斯方块:实现经典的俄罗斯方块游戏,学习方块生成和行消除逻辑。
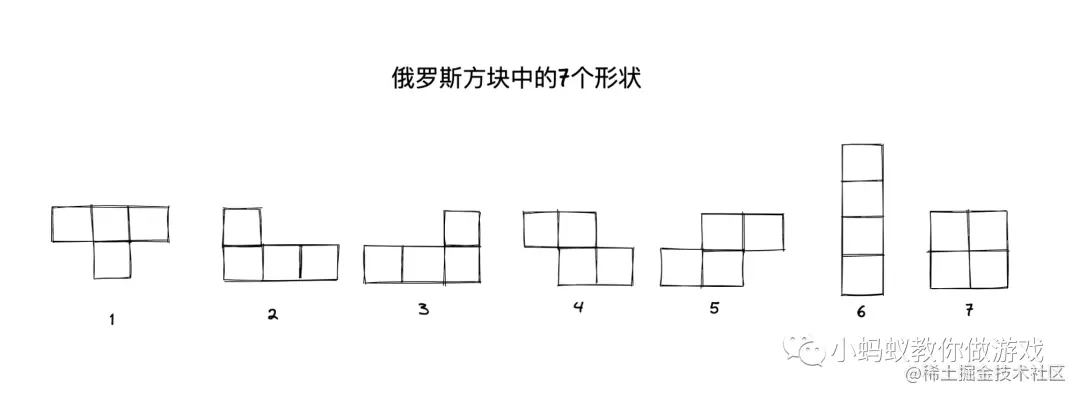
# 1. 俄罗斯方块游戏概述**
俄罗斯方块是一款经典的益智游戏,由阿列克谢·帕基特诺夫于1984年发明。游戏目标是通过控制不断下落的方块,排列成水平线,消除它们并获得分数。俄罗斯方块风靡全球,成为有史以来最受欢迎的视频游戏之一。
# 2.
卷积神经网络实现手势识别程序
卷积神经网络(Convolutional Neural Network, CNN)在手势识别中是一种非常有效的机器学习模型。CNN特别适用于处理图像数据,因为它能够自动提取和学习局部特征,这对于像手势这样的空间模式识别非常重要。以下是使用CNN实现手势识别的基本步骤:
1. **输入数据准备**:首先,你需要收集或获取一组带有标签的手势图像,作为训练和测试数据集。
2. **数据预处理**:对图像进行标准化、裁剪、大小调整等操作,以便于网络输入。
3. **卷积层(Convolutional Layer)**:这是CNN的核心部分,通过一系列可学习的滤波器(卷积核)对输入图像进行卷积,以
绘制企业战略地图:从财务到客户价值的六步法
"BSC资料.pdf"
战略地图是一种战略管理工具,它帮助企业将战略目标可视化,确保所有部门和员工的工作都与公司的整体战略方向保持一致。战略地图的核心内容包括四个相互关联的视角:财务、客户、内部流程和学习与成长。
1. **财务视角**:这是战略地图的最终目标,通常表现为股东价值的提升。例如,股东期望五年后的销售收入达到五亿元,而目前只有一亿元,那么四亿元的差距就是企业的总体目标。
2. **客户视角**:为了实现财务目标,需要明确客户价值主张。企业可以通过提供最低总成本、产品创新、全面解决方案或系统锁定等方式吸引和保留客户,以实现销售额的增长。
3. **内部流程视角**:确定关键流程以支持客户价值主张和财务目标的实现。主要流程可能包括运营管理、客户管理、创新和社会责任等,每个流程都需要有明确的短期、中期和长期目标。
4. **学习与成长视角**:评估和提升企业的人力资本、信息资本和组织资本,确保这些无形资产能够支持内部流程的优化和战略目标的达成。
绘制战略地图的六个步骤:
1. **确定股东价值差距**:识别与股东期望之间的差距。
2. **调整客户价值主张**:分析客户并调整策略以满足他们的需求。
3. **设定价值提升时间表**:规划各阶段的目标以逐步缩小差距。
4. **确定战略主题**:识别关键内部流程并设定目标。
5. **提升战略准备度**:评估并提升无形资产的战略准备度。
6. **制定行动方案**:根据战略地图制定具体行动计划,分配资源和预算。
战略地图的有效性主要取决于两个要素:
1. **KPI的数量及分布比例**:一个有效的战略地图通常包含20个左右的指标,且在四个视角之间有均衡的分布,如财务20%,客户20%,内部流程40%。
2. **KPI的性质比例**:指标应涵盖财务、客户、内部流程和学习与成长等各个方面,以全面反映组织的绩效。
战略地图不仅帮助管理层清晰传达战略意图,也使员工能更好地理解自己的工作如何对公司整体目标产生贡献,从而提高执行力和组织协同性。