STM32实时操作系统(RTOS)入门:FreeRTOS和μC_OS-II实战解析
发布时间: 2024-07-02 06:16:04 阅读量: 5 订阅数: 16 

# 1. 实时操作系统的基础**
实时操作系统(RTOS)是一种专为嵌入式系统设计的操作系统,它能够保证系统在特定时间内对事件做出响应。RTOS的主要特点包括:
- **实时性:**RTOS能够在可预测的时间内响应外部事件,确保系统在指定的时间范围内执行任务。
- **并发性:**RTOS允许多个任务同时执行,提高了系统的效率和吞吐量。
- **确定性:**RTOS能够保证任务在指定的时间内执行,不会出现不可预测的延迟。
# 2. FreeRTOS深入剖析**
**2.1 FreeRTOS的架构和调度机制**
**2.1.1 FreeRTOS的任务和队列**
FreeRTOS是一个基于任务的实时操作系统,任务是FreeRTOS中的基本执行单元。任务可以看作是一个无限循环,它不断执行自己的代码,直到任务完成或被其他任务抢占。
FreeRTOS中的队列是一种同步机制,用于在任务之间传递数据。队列是一个先进先出(FIFO)的数据结构,任务可以通过队列发送和接收数据。
**2.1.2 FreeRTOS的调度算法**
FreeRTOS使用优先级调度算法来调度任务。每个任务都有一个优先级,优先级高的任务比优先级低的任务具有更高的执行权。当有多个任务处于就绪状态时,FreeRTOS会选择优先级最高的任务执行。
**2.2 FreeRTOS的编程技巧**
**2.2.1 FreeRTOS任务的创建和管理**
创建任务需要调用`xTaskCreate()`函数,该函数的参数包括任务函数指针、任务名称、任务堆栈大小、任务参数和任务优先级。
```c
void vTaskCode(void *pvParameters)
{
// 任务代码
}
int main(void)
{
// 创建任务
xTaskCreate(vTaskCode, "Task1", 128, NULL, 1, NULL);
// 启动调度器
vTaskStartScheduler();
return 0;
}
```
**2.2.2 FreeRTOS同步和通信机制**
FreeRTOS提供了多种同步和通信机制,包括:
* **互斥量(Mutex):**用于保护共享资源,防止多个任务同时访问。
* **信号量(Semaphore):**用于限制任务对资源的访问,当资源可用时释放信号量。
* **队列(Queue):**用于在任务之间传递数据。
* **事件组(Event Group):**用于通知任务发生特定事件。
**2.2.3 FreeRTOS的内存管理**
FreeRTOS使用动态内存分配算法来管理内存。任务的堆栈和数据区都是动态分配的。FreeRTOS提供了`pvPortMalloc()`和`vPortFree()`函数用于分配和释放内存。
**表格:FreeRTOS的内存管理函数**
| 函数 | 描述 |
|---|---|
| `pvPortMalloc()` | 分配内存 |
| `vPortFree()` | 释放内存 |
**代码块:使用FreeRTOS分配内存**
```c
// 分配100字节的内存
void *ptr = pvPortMalloc(100);
// 释放内存
vPortFree(ptr);
```
**mermaid流程图:FreeRTOS任务调度流程**
```mermaid
graph LR
subgraph 任务调度流程
A[任务就绪] --> B[选择优先级最高的任务]
B --> C[执行任务]
C --> D[任务完成或被抢占]
D --> A
end
```
# 3. μC_OS-II深入剖析
### 3.1 μC_OS-II的架构和调度机制
#### 3.1.1 μC_OS-II的任务和队列
μC_OS-II是一个基于优先级的抢占式实时操作系统,它将系统中的任务组织成一个优先级队列。每个任务都有一个唯一的优先级,优先级高的任务可以抢占优先级低的任务。
μC_OS-II的任务由以下数据结构表示:
```c
typedef struct OS_TCB {
CPU_STK *StkPtr; /* 任务堆栈指针 */
OS_PRIO Prio; /* 任务优先级 */
OS_TCB *NextPtr; /* 指向下一个任务的指针 */
OS_TCB *PrevPtr; /* 指向上一个任务的指针 */
OS_EVENT *PendEventPtr; /* 任务挂起的事件指针 */
void *MsgPtr; /* 任务消息指针 */
OS_STATE TaskState; /* 任务状态 */
CPU_STK *StkBasePtr; /* 任务堆栈基地址 */
CPU_STK *StkLimitPtr; /* 任务堆栈限制地址 */
OS_OPT TaskOpt; /* 任务选项 */
void *ExtPtr; /* 任务扩展指针 */
} OS_TCB;
```
μC_OS-II的队列是一个先进先出(FIFO)的数据结构,用于在任务之间传递消息。队列由以下数据结构表示:
```c
typedef struct OS_Q {
void **DataPtr; /* 消息队列 */
OS_PRIO QPrio; /* 消息队列优先级 */
OS_Q *NextPtr;
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面解析了 STM32 和 51 单片机,涵盖了架构、性能、应用场景、开发环境、调试技巧、应用案例和故障排除等多个方面。通过深入对比,揭示了两种单片机的优缺点,帮助读者选择最适合自己项目的单片机。专栏还提供了丰富的实战指南和秘籍,从入门到实战开发,循序渐进,让读者快速掌握 STM32 和 51 单片机的编程和应用。无论你是初学者还是经验丰富的工程师,本专栏都能为你提供宝贵的知识和技能,助力你的单片机开发之旅。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
STM32单片机复位电路故障诊断与故障排除指南:快速定位问题,高效解决故障
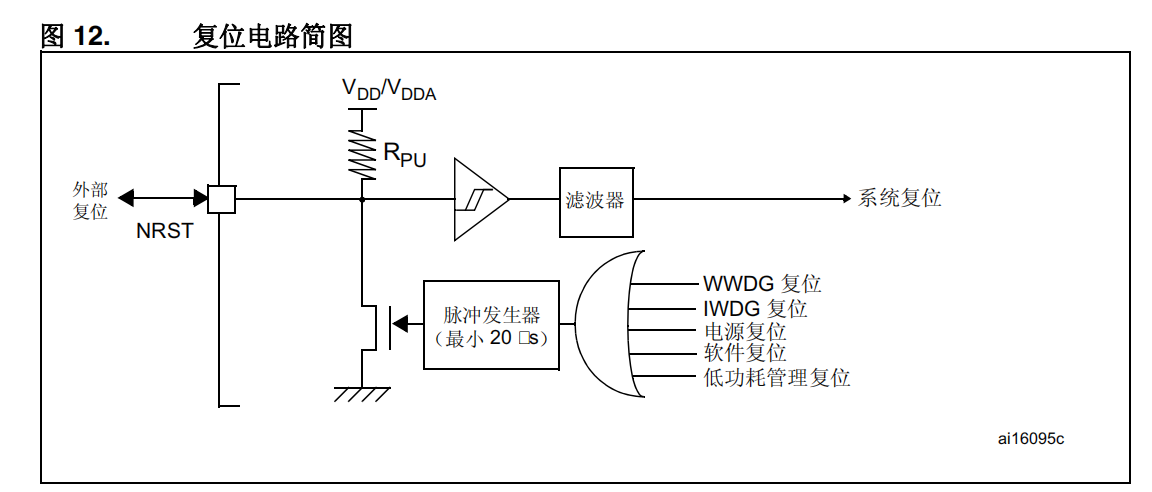
# 1. STM32单片机复位电路概述**
STM32单片机的复位电路负责在各种情况下将单片机复位到已知状态。复位电路通常由外部复位信号、内部复位电路和复位状态指示器组成。
外部复位信号可以来自外部按钮、看门狗定时器或其他外部设备。内部复位电路包括上电复位、掉电复位、软件复位和故障复位。复位状态指示器通常是复位引脚,它指示单片机是否处于复位状态。
# 2
STM32单片机步进电机控制电机控制中的自适应控制:实现电机自适应调节,提升控制性能

# 1. 步进电机控制基础**
步进电机是一种将电脉冲信号转换成角位移或线位移的执行器。其工作原理是将电脉冲
STM32单片机与物联网:连接设备,构建物联网解决方案,迈向智能未来
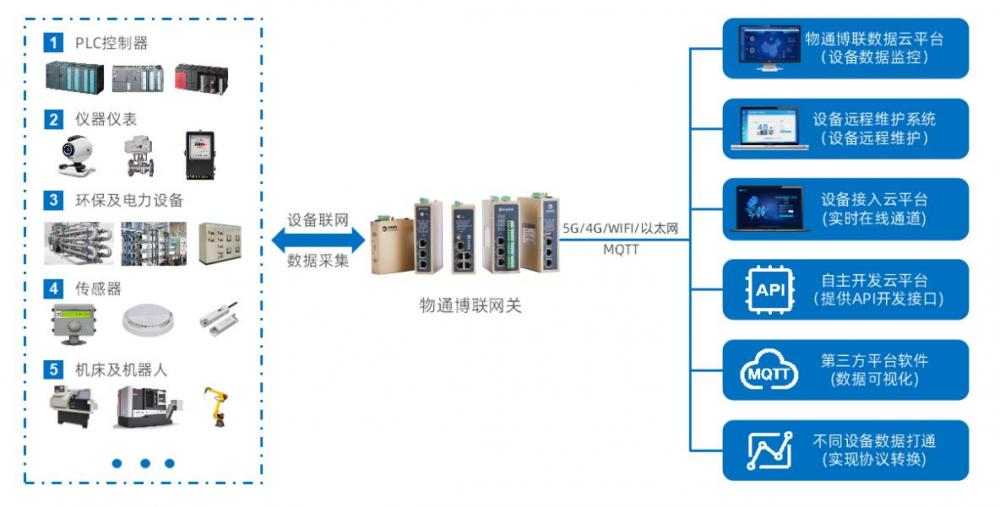
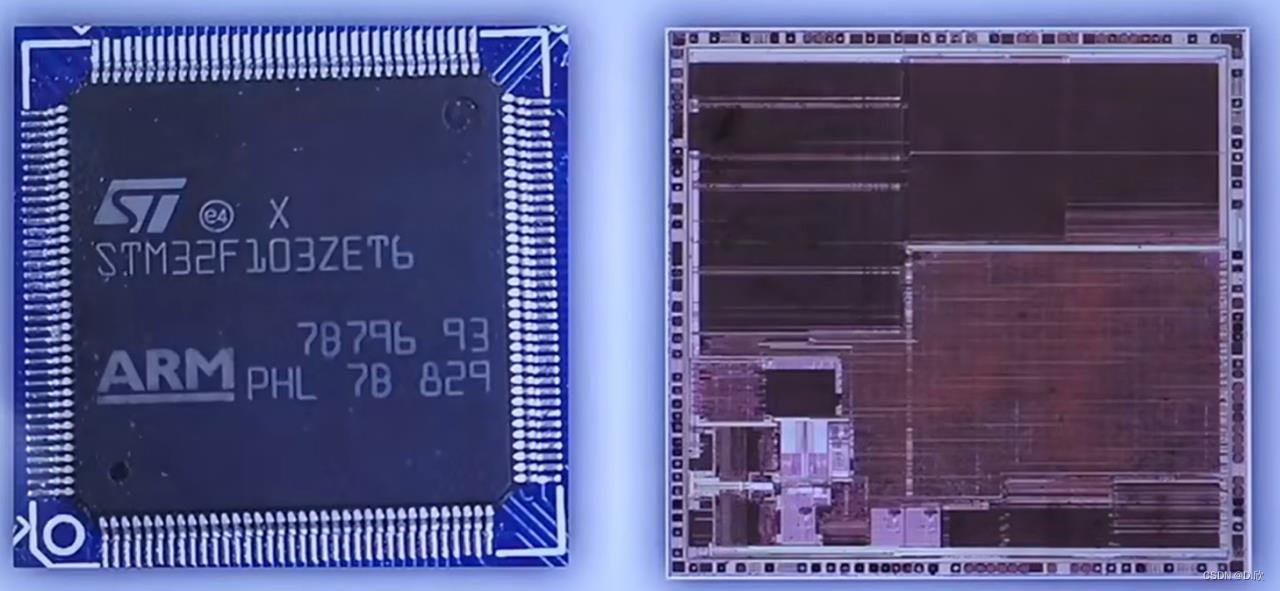
# 1. STM32单片机简介**
STM32单片机是由意法半导体(STMicroelectronics)开发的一系列32位微控制器(MCU)。这些MCU基于ARM Cortex-M内核,以其高性能、低功耗和广泛的应用范围而闻名。
STM32单片机具有广泛的型号选择,从入门级的STM32F0系列到高性能的STM32H7系列。它们提供各种存储器选项、外设和连接功
STM32单片机与工业自动化:深入分析其在工业自动化领域的应用

# 1. STM32单片机的基础理论
### 1.1 STM32单片机概述
STM32单片机是意法半导体(STMicroelectronics)公司推出的一系列基于ARM Cortex-M内核的32位微控制器。它以其高性能、低功耗和丰富的外设而闻名,广泛应用于工业自动化、物联网、医疗设备和消费电子等领域。
### 1.2 STM32单片机架构
STM32单片机采用哈佛架构,具有独立的指令存储器和数据存储器。其
稀疏矩阵在增强现实中的应用:融合现实与虚拟,创造全新体验
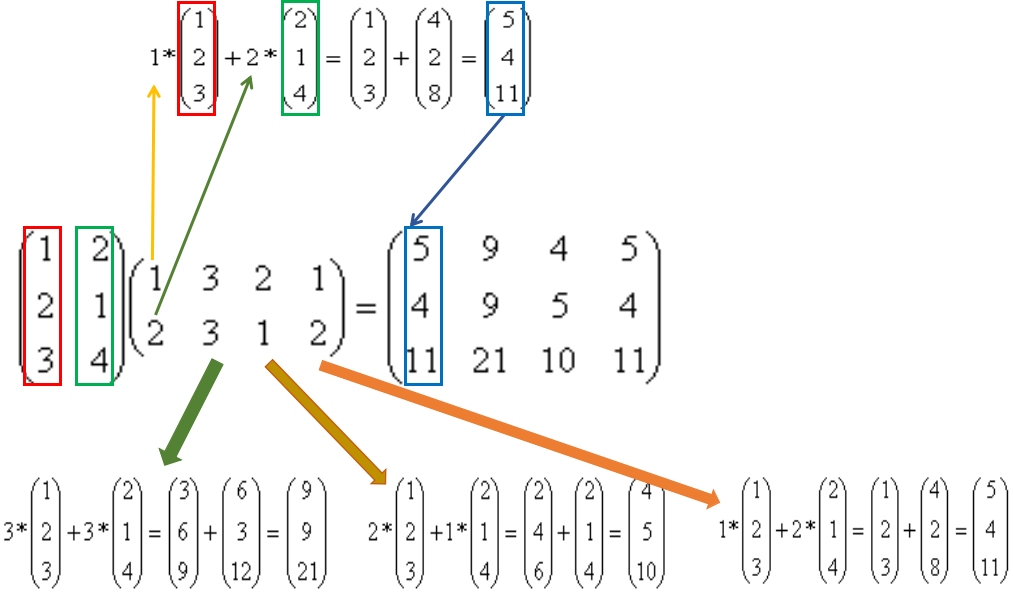
# 1. 稀疏矩阵简介
稀疏矩阵是一种特殊类型的矩阵,其元素大部分为零。在增强现实(AR)中,稀疏矩阵被广泛用于表示场景几何结构、运动轨迹等数据。
稀疏矩阵的存储格式主要有坐标存储格式和行索引存储格式。坐标存储格式直接存储非零元素的坐标和值,而行索引存储格式则存储每个非零元素的行索引和值。稀疏矩阵的运算主要包括加减法和乘法,其中乘法运算需要考虑稀疏性特点进行优化。
# 2. 稀疏矩阵在增强现实中的理论基础
### 2.1 稀疏矩阵的表示和存储
稀疏矩阵是一种特殊类型的矩阵,其中大
传递函数在通信系统中的应用:调制与解调的基石

# 1. 通信系统基础**
通信系统是传输信息的系统,它涉及发送、接收和处理信息。通信系统由以下主要组件组成:
- **发送器:**将信息转换为可通过通信信道传输的信号。
- **通信信道:**传输信号的物理介质,例如电缆、光纤或无线电波。
- **接收器:**从通信信道接收信号并将其转换为可用的信息。
通信系统的性能受到各种因素的影响,包括信道带宽、噪声和干扰。为了优化通信系统的
模式识别:增强现实技术,从原理到应用

# 1. 增强现实技术的原理
增强现实(AR)是一种将数字信息叠加到现实世界中的技术,创造出一种增强现实体验。它通过使用摄像头、传感器和显示器,将虚拟对象与物理环境融合在一起。
AR技术的原理基于计算机视觉和图像处理技术。摄像头捕获现实世界的图像,然后由软件分析图像并识别关键特征。这些特征用于跟踪用户的位置和方向,并根据这些信息将虚拟对象放置在正确的位置。
虚拟对象可以是各种形式,
【STM32单片机嵌入式实战指南】:从入门到精通的进阶之路
# 1. STM32单片机嵌入式系统概述**
STM32单片机是一种基于ARM Cortex-M内核的高性能微控制器,广泛应用于嵌入式系统开发。它具有低功耗、高性能、丰富的片上外设等特点,使其成为物联网、工业控制、医疗电子等领域的理想选择。
嵌入式系统是指将计算机系统嵌入到设备或产品中,为其提供控制和处理功能。STM32单片机作为嵌入式系统中的核心控制器,负责执行程序、处理数据和控制外设。它通过
构建智慧能源管理体系:电池管理系统与智能电网集成
# 1. 智慧能源管理体系概述**
智慧能源管理体系是一种利用先进信息技术和通信技术,对能源生产、传输、分配、利用和存储等环节进行综合管理和优化的系统。其核心目标是提高能源利用效率,降低能源成本,并促进可再生能源的利用。
智慧能源管理体系由多个子系统组成,包括智能电网、电池管理系统、分布式能源系统、能源管理系统和用户侧管理系统。其中,智能电网是能源传输和分配的基础设施,电池管理系统是可再生能源存储和管理的关键技术,分布式能源系统是清洁
特征向量应用案例:从图像分类到文本挖掘,解锁数据价值

# 1. 特征向量简介**
特征向量是机器学习和数据分析中用来表示数据的数学工具。它是一个有序的数字集合,每个数字代表数据的一个特定特征。特征向量可以有效地捕获数据的关键信息,并为机器学习算法提供有用的输入。
特征向量的维度与数据中特征的数量相对应。例如,一个包含年龄、性别和收入的个人数据集可以表示为一个三维特征向量,其中每个维度分别对应年龄、性别
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )