神经网络基础:Python代码实现与案例解析
发布时间: 2024-12-06 14:32:58 阅读量: 9 订阅数: 17 

MicroPythonforESP32快速参考手册1.9.2文档中文pdf版最新版本

# 1. 神经网络的基本原理与组件
## 1.1 神经网络的定义与历史
神经网络是一种计算模型,其灵感来源于人脑中的神经元结构,由大量相互连接的节点(神经元)组成。它能够学习从输入到输出的映射关系,被广泛应用于机器学习领域,尤其在图像识别、语音识别、自然语言处理等领域有着不俗的表现。神经网络的发展历程可以追溯到20世纪40年代,经历了若干次兴起与衰落,近年来随着计算能力的提升和大数据的出现,深度学习逐渐成为主流。
## 1.2 神经网络的基本组件
一个基本的神经网络由输入层、隐藏层(可以有一个或多个)和输出层组成。每层由许多神经元组成,神经元之间通过权值(weights)相连。激活函数(activation function)被用于引入非线性因素,以便神经网络能够学习复杂的决策边界。整个网络通过前向传播(forward propagation)来处理数据,并通过反向传播(backpropagation)算法来更新网络中的权值。
## 1.3 神经网络的类型与选择
根据网络结构和任务的不同,神经网络有多种类型,包括全连接网络、卷积神经网络(CNN)、循环神经网络(RNN)等。不同的网络类型适合解决不同类型的问题,例如CNN在图像处理领域表现出色,而RNN则在序列数据处理如文本和语音方面更为擅长。选择合适的网络类型是实现有效模型的关键步骤之一。
# 2. 神经网络的数学基础和Python实现
## 2.1 线性代数在神经网络中的应用
### 2.1.1 向量和矩阵运算
在神经网络中,向量和矩阵运算无处不在,它们是构成数据和操作数据的基础。向量可以看作是一维数组,而矩阵是二维数组。在神经网络中,输入数据通常是向量形式,权重和偏置则是以矩阵形式出现。
向量运算可以完成数据的线性组合,而矩阵运算能够高效地处理数据的批量转换。以矩阵乘法为例,它在神经网络中用于将输入向量与权重矩阵相乘,然后加上偏置向量,完成前向传播的一个重要步骤。
```python
import numpy as np
# 创建两个矩阵
A = np.array([[1, 2], [3, 4]])
B = np.array([[5, 6], [7, 8]])
# 矩阵乘法
C = np.dot(A, B)
print("矩阵A和矩阵B的乘积是:")
print(C)
```
在上述代码中,我们创建了两个2x2的矩阵`A`和`B`,然后通过`np.dot()`函数计算了它们的乘积。矩阵乘法的每一行和每一列都有明确的数学定义,是线性代数中的基础操作。神经网络中的每一层都可以通过矩阵乘法来表达,进而使用线性代数中的工具进行计算和分析。
### 2.1.2 激活函数的数学原理
激活函数是神经网络中引入非线性的关键环节,它决定了神经网络能否学习和模拟复杂的函数。常见的激活函数包括Sigmoid、ReLU、Tanh等。
以ReLU函数为例,它的数学表达式是 `f(x) = max(0, x)`。ReLU函数将输入值小于0的部分置为0,而保留大于0的输入值。这种操作使得ReLU函数在处理梯度下降时能够保持较高的效率。
```python
def relu(x):
return np.maximum(0, x)
# 测试ReLU函数
x = np.array([-1, 1, 2])
print("ReLU激活函数处理后的结果:")
print(relu(x))
```
上述代码定义了ReLU函数,并在一组输入上进行了测试。通过这个简单的例子,我们可以看到线性代数在激活函数的实现中发挥了关键作用。在更复杂的网络结构中,这种非线性变换更是无处不在,是神经网络强大表达能力的基础。
## 2.2 损失函数和反向传播算法
### 2.2.1 损失函数的选择与作用
损失函数用于衡量模型的预测值与实际值之间的差异。它在训练过程中扮演着反馈的角色,指导模型优化方向。常见的损失函数包括均方误差(MSE)和交叉熵损失函数。
以均方误差为例,它衡量的是预测值与实际值差的平方的平均值,其数学表达式为 `MSE = (1/n) * Σ(y_i - ŷ_i)²`,其中 `n` 是样本数量,`y_i` 是实际值,`ŷ_i` 是预测值。
```python
def mse_loss(y_true, y_pred):
return ((y_true - y_pred) ** 2).mean()
# 模拟真实值和预测值
y_true = np.array([1, 2, 3])
y_pred = np.array([1.1, 2.1, 3.1])
print("均方误差损失函数的计算结果:")
print(mse_loss(y_true, y_pred))
```
在这个例子中,我们定义了均方误差函数,并对一组模拟的真实值和预测值进行了计算。损失函数是优化算法的关键输入,它决定了网络权重的更新方向和幅度。
### 2.2.2 反向传播算法的推导
反向传播算法是训练神经网络的核心机制。它通过链式法则计算损失函数关于每个参数的梯度,并反向传播这些梯度,以此更新网络的权重和偏置。
反向传播过程中,对于每一层的每个参数,都会计算其在损失函数上的梯度。这个过程通常通过自动微分来完成,它能够高效地追踪计算图中的每一步操作,并计算出相应的梯度。
反向传播算法的细节非常丰富,此处不展开全部的数学推导,但需要理解的是,通过这种方式,模型能够根据损失函数提供的反馈不断调整参数,从而提高预测的准确度。
## 2.3 优化算法和正则化技术
### 2.3.1 梯度下降及其变体
梯度下降是最常用的优化算法,它通过迭代的方式逐步更新参数,使损失函数值下降。基本的梯度下降算法步骤简单,但在实际应用中,它的变体如随机梯度下降(SGD)和批量梯度下降等,解决了基本梯度下降在大数据集上效率低下的问题。
SGD每次只用一个样本更新参数,而批量梯度下降则是用一个批次的样本更新。这些变体在算法效率和收敛稳定性方面有所提升。
```python
def gradient_descent(x, y, learning_rate=0.01, epochs=100):
m = 0
c = 0
n = float(len(x))
for epoch in range(epochs):
y_predicted = m * x + c
md = (-2/n) * sum(x * (y - y_predicted))
cd = (-2/n) * sum(y - y_predicted)
m = m - learning_rate * md
c = c - learning_rate * cd
if epoch % 10 == 0:
print(f'Epoch {epoch}: m = {m}, c = {c}')
return m, c
# 模拟数据
x = np.array([1, 2, 3, 4, 5])
y = np.array([5, 7, 9, 11, 13])
print("梯度下降算法训练过程中的参数更新:")
gradient_descent(x, y)
```
在这个梯度下降的例子中,我们尝试通过模拟数据来近似一条直线的斜率(`m`)和截距(`c`)。在实际应用中,这些参数代表的是神经网络的权重和偏置。通过上述代码,我们可以观察到参数的更新过程和趋势。
### 2.3.2 正则化方法:L1、L2与Dropout
正则化是防止神经网络过拟合的技术之一。L1和L2正则化通过在损失函数中添加一个与权重相关的惩罚项,促使网络权重尽可能稀疏或小,从而提高模型的泛化能力。
Dropout正则化则在训练过程中随机丢弃一些神经元,迫使网络学习更加鲁棒的特征表示,有效防止过拟合。
```python
def l2_regularization(model, l2_lambda):
l2_penalty = l2_lambda * sum(np.square(param) for param in model.values())
return l2_penalty
# 假设我们有一个简单的神经网络模型
model = {'w1': np.array([0.1, -0.3]), 'b1': np.array([-0.2, 0.4])}
print("L2正则化应用到模型上的惩罚项值:")
print(l2_regularization(model, 0.1))
```
在这个例子中,我们定义了一个L2正则化函数,并用它来计算一个简单模型的正则化项值。通过添加这个项到损失函数中,我们就可以训练一个带有L2正则化的模型,以防止过拟合。
通过本章节的介绍,我们已经对神经网络的数学基础和Python实现有了初步的认识。下一章将具体介绍如何用Python构建基本的神经网络,包括框架搭建、训练验证过程、测试与评估,以及使用TensorFlow等深度学习框架。
# 3. 用Python构建基本的神经网络
## 3.1 搭建神经网络的框架
### 3.1.1 神经网络的层次结构
神经网络的层次结构是通过不同类型的层来组织的,每种层承担着网络中的不同功能。最基本的层类型包括输入层、隐藏层和输出层。
- **输入层**:是神经网络的第一层,直接接收原始数据。它的神经元数量通常与输入数据的特征维度相匹配。
- **隐藏层**:隐藏层位于输入层和输出层之间,负责学习数据的复杂表示。一个神经网络可以有多个隐藏层,这些隐藏层的深度和复杂度直接关系到网络的学习能力,也被称为“深度学习”的来源。
- **输出层**:输出层负责给出最终的预测结果。输出层的结构和神经元数量取决于具体任务。例如,在二分类问题中,通常使用一个神经元,并采用sigmoid激活函数。
每层中的神经元可以与下一层的每个神经元相连,这样的连接形成一个网络结构。实际应用中,可以通过设置不同数量的神经元和层来调整网络的复杂度,以适应不同的问题。
### 3.1.2 参数初始化方法
在搭建神经网络的过程中,正确地初始化参数至关重要。参数初始化方法的选择会影响到神经网络训练的速度和效果。
- **零初始化**:将所有权重初始化为0是不可取的,因为它会导致所有神经元学习相同的特征,从而降低网络的表达能力。
- **随机初始化**:随机初始化权重可以打破对称性,使得网络中的不同神经元能够学习到不同的特征。但随机初始化的大小需要适当选择,过大或过小都会影响学习效果。
- **Xavier初始化**:也称为Glorot初始化,该方法考虑了权重的方差,使得在前向传播和反向传播过程中,信号和梯度能够保持合适的大小。
- **He初始化**:为ReLU激活函数专门设计的初始化方法,它考虑了ReLU特有的单边性,使得在使用ReLU激活函数时,可以保持激活值在合适的范围内。
```python
import numpy as np
def initialize_parameters_zeros(layers_dims):
parameters = {}
L = len(layers_dims)
for l in range(1, L):
parameters['W' + str(l)] = np.zeros((layers_dims[l], layers_dims[l-1]))
parameters['b' + str(l)] = np.zeros((layers_dims[l], 1))
return parameters
def initialize_parameters_random(layers_dims):
np.random.seed(3)
parameters = {}
L = len(layers_dims)
for l in range(1, L):
parameters['W' + str(l)] = np.random.randn(layers_dims[l], layers_dims[l-1]) * 10
parameters['b' + str(l)] = np.zeros((layers_dims[l], 1))
return parameters
def initialize_parameters_he(layers_dims):
np.random.seed(3)
parameters = {}
L = len(layers_dims)
for l in range(1, L):
parameters['W' + str(l)] = np.random.randn(layers_dims[l], layers_dims[l-1]) * np.sqrt(2. / layers_dims[l-1])
parameters['b' + str(l)] = np.zeros((layers_dims[l], 1))
return parameters
```
以上代码展示了三种参数初始化的方法。代码逻辑分析说明了每种初始化方法的作用,并指出了它们适用的场景。使用这些代码能够帮助我们更好地理解初始化方法对模型的影响,为后续模型训练打下良好的基础。
## 3.2 神经网络的训练与验证
### 3.2.1 前向传播的Python实现
前向传播是神经网络中信息向前流动的过程,从输入层开始,通过各隐藏层的加权求和和非线性激活函数,最终到达输出层。
```python
def linear_forward(A, W, b):
Z = np.dot(W, A) + b
cache = (A, W, b)
return Z, cache
def linear_activation_forward(A_prev, W, b, activation):
Z, linear_cache = linear_forward(A_prev, W, b)
if activation == "sigmoid":
A, activation_cache = sigmoid(Z), Z
elif activation == "relu":
A, activation_cache = relu(Z), Z
cache = (linear_cache, activation_cache)
return A, cache
```
- **linear_forward** 函数实现了线性部分的前向传播,包括计算加权输入`Z`和存储相关缓存。
- **linear_activation_forward** 函数在`linear_forward`的基础上加入了激活函数的实现,支持sigmoid和relu激活函数。
### 3.2.2 训练循环和验证过程
在训练神经网络时,我们需要定义损失函数、优化器,并通过迭代训练循环来更新模型参数。
```python
def compute_cost(AL, Y):
m = Y.shape[1]
cost = -np.sum(Y * np.log(AL) + (1 - Y) * np.log(1 - AL)) / m
cost = np.squeeze(cost)
return cost
def model(X, Y, layers_dims, learning_rate = 0.0075, num_iterations = 3000, print_cost=False):
np.random.seed(1)
costs = []
parameters = initialize_parameters深层_dims(X.shape[0], layers_dims)
for i in range(0, num_iterations):
AL, caches = L_model_forward(X, parameters)
cost = compute_cost(AL, Y)
if print_cost and i % 100 == 0:
print ("Cost after iteration %i: %f" %(i, cost))
costs.append(cost)
gradients = L_model_backward(AL, Y, caches)
parameters = update_parameters(parameters, gradients, learning_rate)
return parameters, costs
```
- **compute_cost** 计算交叉熵损失函数,这是分类问题常用的损失函数。
- **model** 函数实现了整个训练过程,包括前向传播、损失计算、反向传播和参数更新。
## 3.3 神经网络的测试与评估
### 3.3.1 模型测试的步骤
模型训练完成后,需要在独立的测试集上评估模型的性能。
```python
def predict(X, parameters):
AL, caches = L_model_forward(X, parameters)
predictions = (AL > 0.5)
return predictions
```
- **predict** 函数将输入数据通过训练好的模型,并通过阈值判断输出预测结果。
### 3.3.2 评估指标:准确率、召回率、F1分数等
为了全面评估模型的性能,我们通常会计算准确率、召回率和F1分数等指标。
```python
from sklearn.metrics import accuracy_score, recall_score, precision_score, f1_score
def calculate_metrics(Y_true, Y_pred):
accuracy = accuracy_score(Y_true, Y_pred)
recall = recall_score(Y_true, Y_pred)
precision = precision_score(Y_true, Y_pred)
f1 = f1_score(Y_true, Y_pred)
return accuracy, recall, precision, f1
```
- **calculate_metrics** 函数利用了sklearn库计算了准确率、召回率、精确率和F1分数。
通过这些评估指标,我们能够从不同角度了解模型的性能,为模型调整和优化提供依据。准确率是模型预测正确的比例,召回率是真正类被正确识别的比例,精确率是预测为正的样本中真正为正的比例,F1分数是精确率和召回率的调和平均数,用以平衡二者的影响。
在实际操作中,我们可以使用上面的代码对模型在测试集上的性能进行评估。通过分析准确率、召回率、精确率和F1分数等指标,我们可以更全面地理解模型在面对不同类型错误时的表现,并据此做出相应的优化调整。
# 4. 深度学习框架TensorFlow的使用
## 4.1 TensorFlow的基本概念和结构
### 4.1.1 张量和计算图
在TensorFlow中,一切皆是张量(Tensor),张量可以被看作是一个多维的数组或矩阵。它不仅存储数据,还描述了在计算过程中的操作。张量的一个重要属性是它的数据类型和形状。张量的数据类型可以是整型、浮点型或字符串等,形状则是张量的维度。
```python
import tensorflow as tf
# 创建一个常量张量
tensor = tf.constant([[1, 2], [3, 4]])
# 输出张量的类型和形状
print("Tensor data type:", tensor.dtype)
print("Tensor shape:", tensor.shape)
```
在这段代码中,我们创建了一个2x2的整型张量,并打印出了它的数据类型和形状。这个张量可以作为深度学习模型的一个输入,也可以作为计算图中的一个节点。
计算图是TensorFlow的核心概念之一,它是一个有向无环图(DAG),节点表示操作(如加法、乘法),边表示多维数据数组(即张量)在节点间的流动。计算图定义了操作的执行顺序和依赖关系,从而允许TensorFlow高效地管理和优化计算。
### 4.1.2 变量、占位符和操作
变量(Variable)是TensorFlow中用于存储模型参数的对象,如神经网络的权重和偏置。它们可以在训练过程中被更新。变量通常在计算图的构建阶段被初始化,并在会话(Session)中被修改和使用。
```python
# 创建一个变量
W = tf.Variable(tf.random.normal([2, 3]), name='weight')
# 初始化所有变量
init = tf.global_variables_initializer()
```
占位符(Placeholder)用于在会话中输入数据。它们是一个类张量,用于指定操作的输入数据类型和形状,但不存储实际的数据值,这些值会在会话运行时传入。
```python
# 创建一个占位符,用于输入数据
X = tf.placeholder(tf.float32, shape=[None, 2])
```
操作(Operation)是计算图中的节点,执行一些计算任务,如矩阵乘法或加法。操作的结果可以是新的张量或对现有张量的修改。
```python
# 定义一个操作,矩阵乘法
Y = tf.matmul(X, W)
```
在TensorFlow中,可以利用这些基本组件构建复杂的数据流图,从而实现深度学习模型的构建和训练。
## 4.2 使用TensorFlow构建复杂神经网络
### 4.2.1 高级API:tf.keras简介
tf.keras是TensorFlow中用于构建和训练模型的高级API,它提供了一个简单而强大的方法来构建深度学习模型。Keras最初是一个独立的库,后来被集成到TensorFlow中,成为一个模块。它支持快速实验和简洁的模型构建方式,是TensorFlow中用于深度学习研究和生产部署的首选接口。
```python
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Dense
# 构建一个简单的序贯模型
model = Sequential([
Dense(64, activation='relu', input_shape=(784,)),
Dense(10, activation='softmax')
])
# 编译模型
model.compile(optimizer='adam',
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
```
上述代码展示了如何使用tf.keras来创建一个简单的全连接神经网络模型。`Sequential`模型允许我们按顺序添加层。每个`Dense`层都是一个全连接层,其中`input_shape`定义了输入层的形状,`activation`指定了激活函数。
### 4.2.2 卷积神经网络CNN的实现
卷积神经网络(Convolutional Neural Networks, CNN)特别适用于处理具有网格结构的数据,例如图像。在TensorFlow中,使用Keras API可以简单快速地实现CNN。
```python
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Conv2D, MaxPooling2D, Flatten, Dense
# 构建一个卷积神经网络模型
model = Sequential([
Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1)),
MaxPooling2D(2, 2),
Conv2D(64, (3, 3), activation='relu'),
MaxPooling2D(2, 2),
Flatten(),
Dense(128, activation='relu'),
Dense(10, activation='softmax')
])
# 编译模型
model.compile(optimizer='adam',
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
```
这段代码构建了一个用于图像分类任务的CNN模型,其中`Conv2D`用于构建卷积层,`MaxPooling2D`构建池化层,`Flatten`用于将二维的特征图展平为一维,最后通过两个`Dense`全连接层进行分类。
### 4.2.3 循环神经网络RNN的实现
循环神经网络(Recurrent Neural Networks, RNN)专门用于处理序列数据,如时间序列数据或自然语言。在TensorFlow中,Keras API同样可以很容易地实现RNN模型。
```python
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import SimpleRNN, Dense
# 构建一个循环神经网络模型
model = Sequential([
SimpleRNN(50, activation='tanh', input_shape=(None, 10)),
Dense(1, activation='sigmoid')
])
# 编译模型
model.compile(optimizer='adam',
loss='binary_crossentropy',
metrics=['accuracy'])
```
这段代码构建了一个简单的RNN模型用于二分类任务。`SimpleRNN`层是实现RNN的基础层,其中`input_shape`定义了输入数据的形状。由于RNN处理的是序列数据,所以`input_shape`的第二个维度设置为`None`以适应不同长度的输入序列。
## 4.3 神经网络的调试和性能优化
### 4.3.1 调试工具和方法
在TensorFlow中,调试神经网络可以使用`tfdbg`,它是TensorFlow Debugging的缩写。`tfdbg`是TensorFlow官方提供的一个调试工具,它允许用户逐步执行计算图中的操作,观察和检查中间张量的值。
调试的步骤包括设置断点、启动调试会话、单步执行操作以及检查变量或张量的值。此外,TensorFlow还提供了日志记录功能,允许开发者在执行过程中打印信息。
### 4.3.2 性能优化技巧
性能优化是深度学习应用中的一个关键环节。一些常见的优化方法包括:
- 使用更高效的设备,如GPU或TPU;
- 优化计算图的结构,如合并张量操作以减少内存开销;
- 使用批量处理,减少数据加载和预处理的时间;
- 应用混合精度训练,使用16位浮点数替代32位浮点数进行训练;
- 利用分布式训练,将计算任务分散到多个设备上执行。
在实际应用中,开发者需要根据具体问题选择合适的优化方法,并可能需要结合多种策略以达到最佳性能。
在本章中,我们介绍了TensorFlow的基本概念和结构,包括张量和计算图、变量、占位符和操作。随后,我们探讨了使用TensorFlow构建复杂神经网络的方法,重点介绍了tf.keras API,以及如何用它来构建卷积神经网络(CNN)和循环神经网络(RNN)。最后,我们提供了一些神经网络调试和性能优化的技巧,帮助开发者提高模型训练效率和准确性。在下一章,我们将深入探讨神经网络在实际应用中的案例分析,包括图像识别、自然语言处理和强化学习。
# 5. 神经网络的实际应用案例分析
## 5.1 图像识别任务的神经网络应用
### 5.1.1 数据预处理和增强技术
在图像识别任务中,数据预处理和增强技术是至关重要的步骤,它们能够显著提升模型的泛化能力和识别效果。数据预处理包括图像的缩放、归一化以及将标签转换为模型可理解的格式。而数据增强技术则包括随机旋转、翻转、裁剪和颜色变化等,以增加数据集的多样性。
例如,在Python中使用PIL库进行图像预处理的代码如下:
```python
from PIL import Image
import numpy as np
def preprocess_image(image_path):
image = Image.open(image_path).convert('RGB')
image = image.resize((224, 224)) # 假设我们使用的是224x224的图像尺寸
image_array = np.array(image) / 255.0 # 归一化
image_array = np.expand_dims(image_array, axis=0) # 增加一个批次维度
return image_array
```
数据增强技术可以使用各种图像处理库实现,或者在深度学习框架中集成,如tf.keras的`ImageDataGenerator`类。
### 5.1.2 网络结构选择和模型调优
选择合适的神经网络结构和参数对性能至关重要。以卷积神经网络(CNN)为例,通常选择具有多个卷积层和池化层的结构,其后是全连接层。调优的过程可能包括调整卷积核大小、数量,以及改变池化层的类型和步长等。
以下是一个简单的CNN结构示例代码,使用TensorFlow构建:
```python
import tensorflow as tf
model = tf.keras.models.Sequential([
tf.keras.layers.Conv2D(32, (3, 3), activation='relu', input_shape=(224, 224, 3)),
tf.keras.layers.MaxPooling2D(2, 2),
tf.keras.layers.Conv2D(64, (3, 3), activation='relu'),
tf.keras.layers.MaxPooling2D(2, 2),
tf.keras.layers.Conv2D(128, (3, 3), activation='relu'),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(512, activation='relu'),
tf.keras.layers.Dense(num_classes, activation='softmax') # 假设分类任务有num_classes个类别
])
model.compile(optimizer='adam', loss='categorical_crossentropy', metrics=['accuracy'])
```
在实际应用中,调优工作常常借助于超参数搜索技术,如网格搜索(grid search)、随机搜索(random search)或贝叶斯优化方法。
## 5.2 自然语言处理中的应用
### 5.2.1 文本数据的表示方法
在自然语言处理(NLP)中,文本数据的表示方法多种多样。传统的表示方法有词袋模型、TF-IDF等,而深度学习中则有词嵌入(Word Embeddings)和上下文嵌入(Contextual Embeddings)。词嵌入通过将词汇表中的每个词映射到一个连续的向量空间,能够捕捉语义和语法信息。
例如,使用GloVe预训练词向量的代码片段如下:
```python
import numpy as np
from手套 import GloVe
# 加载预训练的GloVe词向量
glove = GloVe(name='840B', dim=300)
# 将文本数据转化为向量表示
def text_to_glove_embeddings(text_list):
embeddings = []
for text in text_list:
word_vectors = [glove.wv[word] for word in text.split() if word in glove.wv]
if word_vectors: # 确保文本不为空
embeddings.append(np.mean(word_vectors, axis=0))
return embeddings
```
### 5.2.2 RNN和LSTM在NLP中的应用实例
循环神经网络(RNN)和其变体长短期记忆网络(LSTM)在处理序列数据,特别是NLP任务中表现卓越。它们能够处理不同长度的输入序列,并且能够捕捉到序列中的时序依赖性。
以下是一个简单的LSTM网络结构示例代码,用于情感分析任务:
```python
from tensorflow.keras.preprocessing.text import Tokenizer
from tensorflow.keras.preprocessing.sequence import pad_sequences
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Embedding, LSTM, Dense
# 示例数据
sentences = ['This movie is great', 'I hate this movie']
labels = [1, 0] # 假设1表示正面情感,0表示负面情感
# 文本处理
tokenizer = Tokenizer(num_words=10000)
tokenizer.fit_on_texts(sentences)
sequences = tokenizer.texts_to_sequences(sentences)
data = pad_sequences(sequences, maxlen=100)
# 构建模型
model = Sequential([
Embedding(input_dim=10000, output_dim=128, input_length=100),
LSTM(64),
Dense(1, activation='sigmoid')
])
model.compile(optimizer='adam', loss='binary_crossentropy', metrics=['accuracy'])
model.summary()
```
在实际应用中,模型需要经过训练、验证和测试等多个阶段,并且可能需要进行多次迭代以达到最佳效果。
## 5.3 强化学习与智能体的构建
### 5.3.1 强化学习基础和算法概述
强化学习(RL)是一种机器学习范式,其中智能体通过与环境交互来学习如何在特定任务上表现良好。关键概念包括状态(state)、动作(action)、奖励(reward)和策略(policy)。常见的RL算法包括Q-learning、Deep Q-Networks (DQN)和Policy Gradient方法。
以下是一个简单的Q-learning算法伪代码示例:
```
初始化Q表为空
对于每一轮游戏:
观察当前状态s
对于可能的所有动作a:
根据Q表选择动作a,并执行动作a获得奖励r和新状态s'
计算TD目标:r + γ * max(Q(s', a'))
更新Q表:Q(s, a) = Q(s, a) + α * (TD目标 - Q(s, a))
设置新状态s为当前状态s
```
### 5.3.2 智能体的训练和评估
智能体的训练过程是通过与环境交互,不断更新其策略直到收敛的过程。评估智能体的性能通常需要在训练过程中的不同阶段进行多次测试。
在TensorFlow中,构建一个使用DQN的智能体可能涉及到如下步骤:
1. 构建经验回放机制
2. 定义Q网络和目标Q网络
3. 定义损失函数和优化器
4. 训练过程中的样本收集和回放
5. 策略更新
评估智能体的代码示例:
```python
import gym
env = gym.make('CartPole-v0')
model = build_dqn_model(...) # 假设build_dqn_model是自定义的DQN模型构建函数
def evaluate_agent(env, model, num_episodes):
total_rewards = []
for episode in range(num_episodes):
state = env.reset()
total_reward = 0
while True:
action = model.predict(state)
state, reward, done, _ = env.step(action)
total_reward += reward
if done:
break
total_rewards.append(total_reward)
return total_rewards
# 评估智能体在100个游戏中平均得分
print("Average reward over 100 episodes:", np.mean(evaluate_agent(env, model, 100)))
```
在评估智能体时,要特别注意不要在训练期间使用的任何测试数据,以确保评估的有效性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Python 中深度学习的基础概念,涵盖广泛的主题。从理解深度学习背后的数学原理到使用 Python 实现神经网络,再到掌握深度学习框架 TensorFlow 和 Keras,专栏提供了全面的指南。此外,它还深入探讨了卷积神经网络 (CNN)、循环神经网络 (RNN) 和长短期记忆 (LSTM) 等特定技术,以及它们在图像处理、序列数据处理和自然语言处理中的应用。专栏还介绍了强化学习、数据预处理、模型调优、优化算法、激活函数、正则化技术、模型压缩和数据增强等高级话题。通过结合理论解释、代码示例和实际项目,本专栏为读者提供了在 Python 中构建和训练高效深度学习模型所需的全面知识。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
HTML与海康摄像头接口对接:一步到位掌握入门到实战精髓
参考资源链接:[HTML实现海康摄像头实时监控:避开vlc插件的挑战](https://wenku.csdn.net/doc/645ca25995996c03ac3e6104?spm=1055.2635.3001.10343)
# 1. HTML与海康摄像头接口对接概述
在当今数字化时代,视频监控系统已广泛应用于安全监控、远程教育、医疗诊断等领域。海康威视作为领先的视频监控设备制造商
深入理解TSF架构】:腾讯云微服务核心组件深度剖析
参考资源链接:[腾讯云微服务TSF考题解析:一站式应用管理与监控](https://wenku.csdn.net/doc/6401ac24cce7214c316eac4c?spm=1055.2635.3001.10343)
# 1. 微服务架构概述
## 微服务的起源和定义
微服务架构是一种设计方法论,它将单一应用程序划分为一组小型服务,每个服务运行在其独立的进程中,并使用轻量级的通信机制进行通信。这一架构的起源可以追溯到云
CFD模拟实战演练:打造你的首个流体模型,0到1的全程指南
参考资源链接:[使用Fluent进行UDF编程:实现自定义湍流模型](https://wenku.csdn.net/doc/5sp61tmi1a?spm=1055.2635.3001.10343)
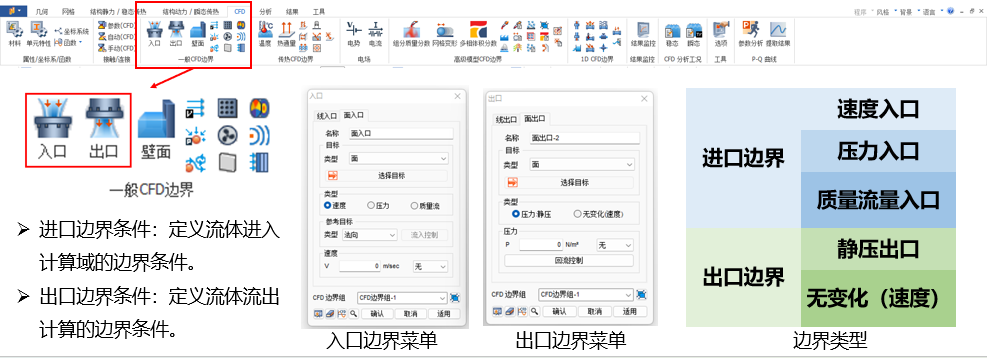
# 1. CFD模拟基础与准备
计算流体动力学(CFD)是一种通过计算机模拟和分析流体流动和热传递过程的技术,广泛应用于航空、汽车
【机器视觉入门至精通】:掌握PatMax技术,带你走向视觉识别巅峰(14项核心技术全面解析)

参考资源链接:[深度解析PatMax算法:精确位置搜索与应用](https://wenku.csdn.net/doc/1a1q5wwnsp?spm=1055.2635.3001.10343)
# 1. 机器视觉基础与PatMax技术概述
## 1.1 机器视觉的定义及重要性
机器视觉是计算机科学中的一
【仿真效率飞跃】:掌握EDEM颗粒堆积导出与Fluent网格划分终极技巧

参考资源链接:[EDEM模拟:堆积颗粒导出球心坐标与Fluent网格划分详解](https://wenku.csdn.net/doc/7te8fq7snp?spm=1055.2635.3001.10343)
# 1. EDEM颗粒堆积仿真基础与应用
## 1.1 颗粒堆积仿真简介
EDEM是一种基于离散元方法(DEM)的仿真软件,广泛应用于
揭秘IT行业的社会责任(CSR):如何通过ISO 26000实现道德卓越
参考资源链接:[ISO26000-2010《社会责任指南》中文标准.pdf](https://wenku.csdn.net/doc/3j8v3gmzqj?spm=1055.2635.3001.10343)
# 1. 社会责任(CSR)概述与重要性
## 1.1 社会责任的概念和背景
社会责任(Corporate Social Responsibility, CSR)是指企业在追求经济利益的同时,积极履行对社会、环境以及道德等方面的义务。在全球化和社会信息化高速发展的背景下,企业社会责任已经成为企业不可忽视的重要议题。其不仅关乎企业的长远发展,也是衡量企业是否为社会贡献价值的重要标准。
##
多相流模拟新手指南:STAR-CCM+ V9.06新特性与操作技巧

参考资源链接:[STAR-CCM+ V9.06 中文教程:从基础到高级应用](https://wenku.csdn.net/doc/6401abedcce7214c316ea024?spm=1055.2635.3001.10343)
# 1. 多相流模拟基础与STAR-CCM+简介
## 1.1 多相流模拟的基本概念
多相
从投稿到发表:【IEEE格式论文全流程攻略】,科研新手必备指南

参考资源链接:[IEEE论文图像指南:排版与格式详解](https://wenku.csdn.net/doc/3prd9cemgn?spm=1055.2635.3001.10343)
# 1. IEEE格式论文写作基础
在学术写作中,了解并掌握适当的格式规范是至关重要的。IEEE(电
东芝硬盘固件更新失败应对策略:故障诊断与数据恢复手册

参考资源链接:[提升性能!东芝硬盘固件升级全面指南](https://wenku.csdn.net/doc/1qz7k2orcy?spm=1055.2635.3001.10343)
# 1. 东芝硬盘固件更新的重要性与风险
在当今数字化时代,数据对于企业和个人的重要性不言而喻。因此,保
【Spring Data与数据库交互】:6大优化策略助你实现数据库操作的极致效率
参考资源链接:[Spring框架基础与开发者生产力提升](https://wenku.csdn.net/doc/6412b46cbe7fbd1778d3f8af?spm=1055.2635.3001.10343)
# 1. Spring Data的基本概念和优势
## 1.1 Spring Data简介
Spring Data是一个基于Spring框架的数据访问技术家族,其主要目标是简化数据访问层(Reposit
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )