强化学习简介:如何用Python实现智能决策
发布时间: 2024-12-06 15:20:06 阅读量: 9 订阅数: 17 

基于Python实现的智能决策技术强化学习作业设计源码

# 1. 强化学习基础概念
## 1.1 强化学习简介
强化学习(Reinforcement Learning,简称 RL)是机器学习领域的一个分支,它关注于如何通过与环境的交互来学习最优策略。在强化学习框架中,一个智能体(agent)在特定环境(environment)中采取行动(actions),根据行动的效果获得反馈(rewards),并逐渐学习到如何在各种情况下作出最优选择,以最大化预期的累积奖励。
## 1.2 核心要素和流程
强化学习的三个核心要素是智能体、环境和奖励。智能体通过试错的方式与环境进行交互,根据环境反馈的奖励信号调整自己的策略。典型的强化学习流程包括状态观测、策略选择、行动执行、奖励获取和策略更新。
## 1.3 与监督学习和无监督学习的区别
与监督学习需要标注数据作为训练依据不同,强化学习不依赖于标注数据,而是通过与环境的交互来学习。与无监督学习相比,强化学习引入了奖励机制,其目的是发现能够获得最大累积奖励的行为策略,而不仅仅是寻找数据中的模式或结构。
# 2. Python在强化学习中的应用
Python已经成为数据科学和机器学习领域中不可或缺的工具,特别是在强化学习的实现和应用方面。Python因其简洁的语法和强大的库支持,在强化学习的研究与开发中广受欢迎。本章将重点介绍如何在Python环境下集成强化学习库、实现基础算法以及利用高级技术。
## 2.1 Python与强化学习库的集成
在强化学习项目中,Python的库和框架扮演着重要角色。库的集成不仅涉及到安装和配置,还包括对库的理解和熟练使用。
### 2.1.1 安装和配置强化学习库
要开始使用Python进行强化学习,首先需要安装一些关键的库。在众多库中,`gym`、`stable-baselines`和`tensorflow`是被广泛使用的库。
- `gym`是OpenAI开发的一款强化学习环境的接口,它提供了一个简单的API来模拟多种环境。
- `stable-baselines`是基于`tensorflow`的一个强化学习库,包含多种高级强化学习算法的实现。
- `tensorflow`是一个开源的机器学习框架,被广泛用于深度学习和强化学习的模型构建和训练。
安装这些库可以通过Python的包管理工具`pip`来完成,例如:
```bash
pip install gym
pip install stable-baselines
pip install tensorflow
```
### 2.1.2 Python环境下的基本编程实践
一旦安装了上述库,就可以开始Python环境下的强化学习编程实践。一个典型的流程包括初始化环境、定义策略、收集经验和训练模型。
一个简单的强化学习环境初始化过程如下所示:
```python
import gym
# 创建一个环境实例
env = gym.make('CartPole-v1')
# 初始化环境
observation = env.reset()
for _ in range(1000):
# 选择动作
action = env.action_space.sample() # 随机选择动作
# 执行动作并观察结果
observation, reward, done, info = env.step(action)
# 判断游戏是否结束
if done:
observation = env.reset()
env.close()
```
代码的逻辑解释如下:
- 首先导入`gym`库,用于创建环境。
- 使用`gym.make()`函数创建一个强化学习环境的实例,在这里是`CartPole-v1`环境。
- 使用`env.reset()`对环境进行初始化,开始一个新的游戏会话。
- 进入一个循环中,其中通过随机选择动作来模拟决策过程。每次循环中,会将动作传递给环境并观察结果。
- `env.step(action)`函数执行动作,并返回新的观察、奖励、是否完成(done)以及额外信息(info)。
- 如果游戏结束,即`done`为`True`,则通过调用`env.reset()`重新开始游戏。
- 循环结束后,调用`env.close()`来关闭环境。
## 2.2 用Python实现基本强化学习算法
在Python中实现基本的强化学习算法是深入理解其原理的重要步骤。
### 2.2.1 Q学习算法的实现
Q学习是强化学习中最基本的算法之一,它是一种无模型的强化学习方法,主要通过Q值来表示状态-动作对的价值。
以下是Q学习算法的一个简单实现:
```python
import numpy as np
import random
import gym
class QLearningAgent:
def __init__(self, learning_rate=0.01, discount_factor=0.9, epsilon=0.1):
self.lr = learning_rate
self.gamma = discount_factor
self.epsilon = epsilon
self.q_table = dict()
def get_q_value(self, state, action):
# 如果状态-动作对是新的,则初始化Q值为0
if (state, action) not in self.q_table:
self.q_table[(state, action)] = 0.0
return self.q_table[(state, action)]
def update_q_table(self, state, action, reward, next_state):
q_predict = self.get_q_value(state, action)
# 选择下一个状态的最大Q值
q_target = reward + self.gamma * max([self.get_q_value(next_state, a) for a in range(env.action_space.n)])
self.q_table[(state, action)] += self.lr * (q_target - q_predict)
def choose_action(self, state):
# 通过epsilon-greedy策略选择动作
if random.uniform(0, 1) < self.epsilon:
return random.choice(range(env.action_space.n))
else:
q_values = [self.get_q_value(state, a) for a in range(env.action_space.n)]
max_q_value = max(q_values)
max_actions = [a for a, q in enumerate(q_values) if q == max_q_value]
return random.choice(max_actions)
env = gym.make('Taxi-v3')
agent = QLearningAgent()
episodes = 2000
for _ in range(episodes):
state = env.reset()
done = False
while not done:
action = agent.choose_action(state)
next_state, reward, done, _ = env.step(action)
agent.update_q_table(state, action, reward, next_state)
state = next_state
```
在上述代码中,`QLearningAgent`类实现了Q学习的核心逻辑。它包括Q值的初始化、更新Q表以及选择动作的策略。
- `get_q_value`方法用于获取特定状态和动作对应的价值。
- `update_q_table`方法根据Q学习更新规则来更新Q值。
- `choose_action`方法使用epsilon-greedy策略来选择动作。
### 2.2.2 SARSA算法与比较
SARSA是另一种强化学习算法,它与Q学习类似,但具有在线更新的特点。SARSA在每次选取动作后立即更新Q值,而不是在得到奖励后。
```python
class SarsaAgent:
def __init__(self, learning_rate=0.01, discount_factor=0.9, epsilon=0.1):
self.lr = learning_rate
self.gamma = discount_factor
self.epsilon = epsilon
self.q_table = dict()
def get_q_value(self, state, action):
if (state, action) not in self.q_table:
self.q_table[(state, action)] = 0.0
return self.q_table[(state, action)]
def update_q_table(self, state, action, reward, next_state, next_action):
q_predict = self.get_q_value(state, action)
q_target = reward + self.gamma * self.get_q_value(next_state, next_action)
self.q_table[(state, action)] += self.lr * (q_target - q_predict)
# 其他代码与QLearningAgent类似
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Python 中深度学习的基础概念,涵盖广泛的主题。从理解深度学习背后的数学原理到使用 Python 实现神经网络,再到掌握深度学习框架 TensorFlow 和 Keras,专栏提供了全面的指南。此外,它还深入探讨了卷积神经网络 (CNN)、循环神经网络 (RNN) 和长短期记忆 (LSTM) 等特定技术,以及它们在图像处理、序列数据处理和自然语言处理中的应用。专栏还介绍了强化学习、数据预处理、模型调优、优化算法、激活函数、正则化技术、模型压缩和数据增强等高级话题。通过结合理论解释、代码示例和实际项目,本专栏为读者提供了在 Python 中构建和训练高效深度学习模型所需的全面知识。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
HTML与海康摄像头接口对接:一步到位掌握入门到实战精髓
参考资源链接:[HTML实现海康摄像头实时监控:避开vlc插件的挑战](https://wenku.csdn.net/doc/645ca25995996c03ac3e6104?spm=1055.2635.3001.10343)
# 1. HTML与海康摄像头接口对接概述
在当今数字化时代,视频监控系统已广泛应用于安全监控、远程教育、医疗诊断等领域。海康威视作为领先的视频监控设备制造商
深入理解TSF架构】:腾讯云微服务核心组件深度剖析
参考资源链接:[腾讯云微服务TSF考题解析:一站式应用管理与监控](https://wenku.csdn.net/doc/6401ac24cce7214c316eac4c?spm=1055.2635.3001.10343)
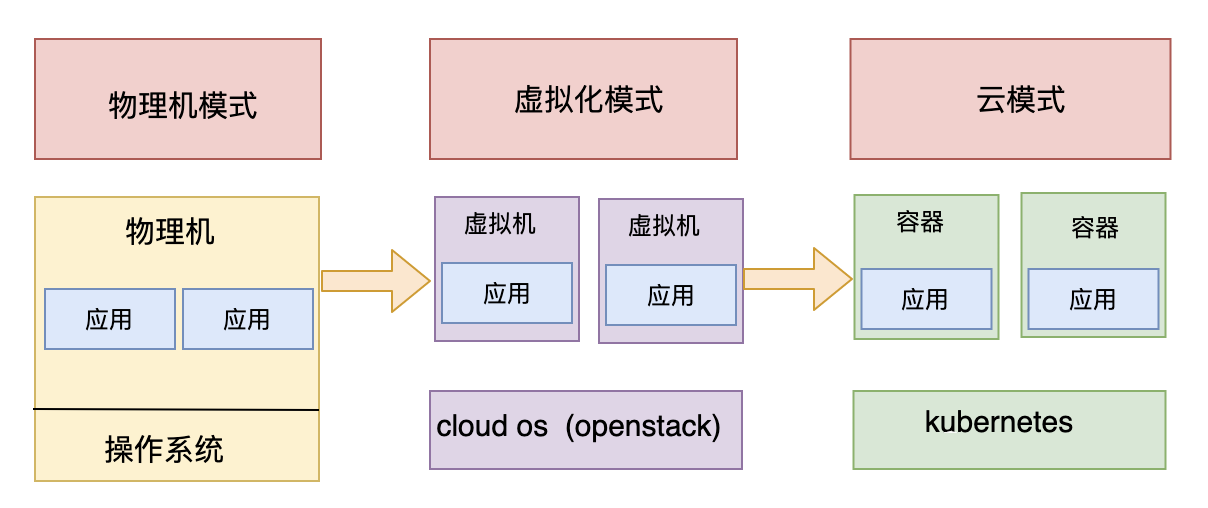
# 1. 微服务架构概述
## 微服务的起源和定义
微服务架构是一种设计方法论,它将单一应用程序划分为一组小型服务,每个服务运行在其独立的进程中,并使用轻量级的通信机制进行通信。这一架构的起源可以追溯到云
CFD模拟实战演练:打造你的首个流体模型,0到1的全程指南
参考资源链接:[使用Fluent进行UDF编程:实现自定义湍流模型](https://wenku.csdn.net/doc/5sp61tmi1a?spm=1055.2635.3001.10343)
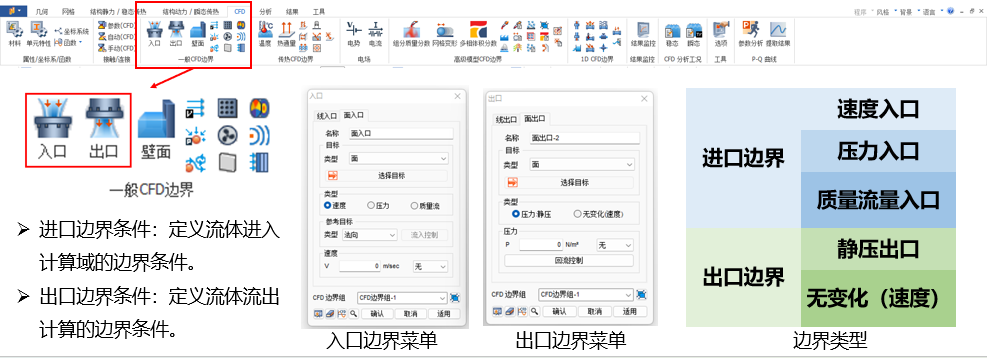
# 1. CFD模拟基础与准备
计算流体动力学(CFD)是一种通过计算机模拟和分析流体流动和热传递过程的技术,广泛应用于航空、汽车
【机器视觉入门至精通】:掌握PatMax技术,带你走向视觉识别巅峰(14项核心技术全面解析)

参考资源链接:[深度解析PatMax算法:精确位置搜索与应用](https://wenku.csdn.net/doc/1a1q5wwnsp?spm=1055.2635.3001.10343)
# 1. 机器视觉基础与PatMax技术概述
## 1.1 机器视觉的定义及重要性
机器视觉是计算机科学中的一
【仿真效率飞跃】:掌握EDEM颗粒堆积导出与Fluent网格划分终极技巧

参考资源链接:[EDEM模拟:堆积颗粒导出球心坐标与Fluent网格划分详解](https://wenku.csdn.net/doc/7te8fq7snp?spm=1055.2635.3001.10343)
# 1. EDEM颗粒堆积仿真基础与应用
## 1.1 颗粒堆积仿真简介
EDEM是一种基于离散元方法(DEM)的仿真软件,广泛应用于
揭秘IT行业的社会责任(CSR):如何通过ISO 26000实现道德卓越
参考资源链接:[ISO26000-2010《社会责任指南》中文标准.pdf](https://wenku.csdn.net/doc/3j8v3gmzqj?spm=1055.2635.3001.10343)
# 1. 社会责任(CSR)概述与重要性
## 1.1 社会责任的概念和背景
社会责任(Corporate Social Responsibility, CSR)是指企业在追求经济利益的同时,积极履行对社会、环境以及道德等方面的义务。在全球化和社会信息化高速发展的背景下,企业社会责任已经成为企业不可忽视的重要议题。其不仅关乎企业的长远发展,也是衡量企业是否为社会贡献价值的重要标准。
##
多相流模拟新手指南:STAR-CCM+ V9.06新特性与操作技巧

参考资源链接:[STAR-CCM+ V9.06 中文教程:从基础到高级应用](https://wenku.csdn.net/doc/6401abedcce7214c316ea024?spm=1055.2635.3001.10343)
# 1. 多相流模拟基础与STAR-CCM+简介
## 1.1 多相流模拟的基本概念
多相
从投稿到发表:【IEEE格式论文全流程攻略】,科研新手必备指南

参考资源链接:[IEEE论文图像指南:排版与格式详解](https://wenku.csdn.net/doc/3prd9cemgn?spm=1055.2635.3001.10343)
# 1. IEEE格式论文写作基础
在学术写作中,了解并掌握适当的格式规范是至关重要的。IEEE(电
东芝硬盘固件更新失败应对策略:故障诊断与数据恢复手册

参考资源链接:[提升性能!东芝硬盘固件升级全面指南](https://wenku.csdn.net/doc/1qz7k2orcy?spm=1055.2635.3001.10343)
# 1. 东芝硬盘固件更新的重要性与风险
在当今数字化时代,数据对于企业和个人的重要性不言而喻。因此,保
【Spring Data与数据库交互】:6大优化策略助你实现数据库操作的极致效率
参考资源链接:[Spring框架基础与开发者生产力提升](https://wenku.csdn.net/doc/6412b46cbe7fbd1778d3f8af?spm=1055.2635.3001.10343)
# 1. Spring Data的基本概念和优势
## 1.1 Spring Data简介
Spring Data是一个基于Spring框架的数据访问技术家族,其主要目标是简化数据访问层(Reposit
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )