多任务处理不再难:8051单片机任务调度的终极指南
发布时间: 2024-12-15 15:16:24 阅读量: 9 订阅数: 9 
参考资源链接:[8051指令详解:111个分类与详细格式](https://wenku.csdn.net/doc/1oxebjsphj?spm=1055.2635.3001.10343)
# 1. 8051单片机任务调度基础
在嵌入式系统领域,任务调度是确保多任务顺利执行和高效资源管理的关键技术之一。8051单片机,作为一款经典的微控制器,其任务调度的理解和应用对于系统设计者来说至关重要。本章将简要介绍8051单片机任务调度的基础知识,包括任务调度的基本概念和实际应用前的必要准备。
## 1.1 任务调度的重要性
任务调度之所以重要,是因为它能让单片机有效管理多个并发任务,保证时间的合理分配和任务之间的高效协作。良好的任务调度机制能提高系统性能,减少资源浪费,并确保关键任务的及时执行。
## 1.2 8051单片机简介
8051单片机是由英特尔在1980年推出的基于4位微控制器的一种架构,因其简单、稳定、易于编程的特点被广泛应用于工业控制、家用电器等领域。它通常具有有限的资源,包括内存和处理器,因此任务调度对于发挥其最大效能至关重要。
## 1.3 准备工作
为了能够进行有效的任务调度,开发者首先需要熟悉8051单片机的硬件架构、指令集以及其编程接口。在此基础上,可以进一步了解如何在8051上实现中断处理、定时器配置和上下文切换等任务调度的关键技术点。
在本章中,我们将从最基本的概念开始,逐步深入到任务调度的理论与实践,帮助读者建立起一套完整的8051单片机任务调度的知识体系。
# 2. 8051单片机的任务调度理论
任务调度是单片机软件设计中的关键组成部分,它负责根据预定的规则和优先级合理分配处理器时间给各个任务,以保证系统的高效、稳定运行。在深入探讨8051单片机的任务调度实践和高级技术之前,理解任务调度的基本理论是十分必要的。
### 2.1 多任务处理的概念
#### 2.1.1 任务调度的定义和目的
任务调度可以定义为一个过程,它根据一定的规则和策略,在多个并发执行的任务之间分配处理器时间。在嵌入式系统中,任务通常指的是由代码实现的、可以独立执行的程序单元。任务调度的目的在于提高系统的响应性和效率,确保高优先级任务得到及时处理,同时还能保证低优先级任务的正常运行。
#### 2.1.2 任务调度模型的分类
任务调度模型可以分为抢占式和非抢占式两大类。在抢占式调度中,高优先级的任务可以中断当前低优先级任务的执行,立即获得CPU控制权。而在非抢占式调度中,任务一旦获得CPU,除非其主动释放,否则不会被其他任务抢占。8051单片机通常采用抢占式调度,以适应实时性要求较高的应用。
### 2.2 任务调度算法基础
在任务调度领域,存在多种算法,每种算法都有其独特的应用场景和优缺点。
#### 2.2.1 时间片轮转(Round Robin)
时间片轮转算法为每个任务分配一个固定时间长度的时间片,任务在自己的时间片内运行,时间片用完后,任务被放回队列尾部等待下一次调度。该方法简单公平,但可能导致上下文切换频繁,影响系统性能。
```c
// 伪代码示例:时间片轮转调度
// task_list: 存放所有任务的队列
// time_quantum: 时间片长度
void round_robin_schedule(task_list, time_quantum) {
while (true) {
for each task in task_list {
run task for time_quantum;
if (task is finished) {
remove task from task_list;
} else {
enqueue task at the end of task_list;
}
}
}
}
```
#### 2.2.2 优先级调度(Priority Scheduling)
优先级调度算法根据任务的优先级决定执行顺序。每个任务都有一个优先级值,CPU总是选择优先级最高的任务来执行。这种方法能够快速响应高优先级任务,但可能会导致低优先级任务饿死。
```c
// 伪代码示例:优先级调度
// task_list: 存放所有任务的队列,任务包含优先级信息
void priority_schedule(task_list) {
while (true) {
task* highest_prio_task = find_highest_priority_task(task_list);
run highest_prio_task until completion;
remove highest_prio_task from task_list;
}
}
```
#### 2.2.3 先来先服务(FCFS)
先来先服务调度算法是按照任务到达的顺序进行调度。这种方法简单易实现,但可能会因为某个长任务阻塞后续任务而导致整体效率低下。
### 2.3 任务调度的实现机制
任务调度的实现机制包括上下文切换、中断服务和任务状态管理等方面。
#### 2.3.1 上下文切换(Context Switching)
上下文切换是任务调度的一个重要组成部分。当中断发生或任务切换时,当前任务的运行环境(上下文)需要被保存,以便之后可以从同一点继续执行。上下文通常包括寄存器、状态字、程序计数器等信息。
```c
// 伪代码示例:上下文切换
// current_task: 当前任务
// next_task: 下一个任务
void context_switch(current_task, next_task) {
save current_task context;
restore next_task context;
continue next_task execution;
}
```
#### 2.3.2 中断服务和任务调度
在8051单片机中,中断服务程序(ISR)负责处理外部事件,并可能触发任务调度。当中断发生时,CPU停止当前任务执行,转而执行对应的ISR。ISR通常简短快速,完成后调度器决定接下来执行哪个任务。
#### 2.3.3 任务状态和管理
任务状态可以包括就绪、运行、阻塞和终止等。任务调度器负责维护任务状态,并根据系统情况调整任务队列。任务的状态转换通常由调度器或任务自身决定,如:
- 就绪态:任务准备就绪,等待调度器分配CPU。
- 运行态:任务正在执行。
- 阻塞态:任务由于等待某些资源或事件而暂停执行。
- 终止态:任务执行完毕或异常退出。
任务状态转换图可以表示为:
```mermaid
graph LR
A[新创建] -->|资源分配成功| B[就绪]
B -->|被调度| C[运行]
C -->|等待事件| D[阻塞]
C -->|执行完毕| E[终止]
D -->|事件发生| B
```
在这个图表中,新创建的任务首先需要获得系统资源,然后进入就绪状态,等待调度器分配处理器。处于运行状态的任务可以被阻塞,等待某些事件的发生,当事件发生时,任务重新进入就绪状态。运行状态的任务也可以正常结束,进入终止状态。
通过本章节的介绍,我们对任务调度的概念、分类、算法和实现机制有了初步的了解。在接下来的章节中,我们将具体探讨8051单片机如何实现这些理论

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ADS滤波器设计全攻略】:新手必备的12个基础知识
参考资源链接:[ads 差分滤波器设计及阻抗匹配](https://wenku.csdn.net/doc/6412b59abe7fbd1778d43bd8?spm=1055.2635.3001.10343)
# 1. ADS滤波器设计概述
在无线通信、雷达系统以及信号处理领域,滤波器是实现信号选择性传输的核心组件。ADS(Advanced Design System)是一款功能强大的
【模拟信号转数字】:电压电流信号采集技术要点,让你秒变数据采集高手
参考资源链接:[STM32 ADC应用:太阳能电池板电压电流监测与数码管显示](https://wenku.csdn.net/doc/6412b75abe7fbd1778d49fed?spm=1055.2635.3001.10343)
# 1. 模拟信号与数字信号的基本概念
## 1.1 模拟信号的特性
模拟信号是时间连续且值连续的信号,它们可以通过连续变化的电压或电流来表示信息,例如人的声音和乐器的声音在麦克风中转换为电信
【CUDA vs OpenCL】:深度剖析选择GPGPU框架的决定性因素
参考资源链接:[GPGPU编程模型与架构解析:CUDA、OpenCL及应用](https://wenku.csdn.net/doc/5pe6wpvw55?spm=1055.2635.3001.10343)
# 1. CUDA与OpenCL框架概述
## 1.1 GPU计算的崛起
随着计算需求的不断提升,GPU(图形处理单元)已从单纯的图形渲染扩展到科学
Ambarella H22芯片全解析:如何在90天内实现性能跃升与系统优化
参考资源链接:[Ambarella H22芯片规格与特性:低功耗4K视频处理与无人机应用](https://wenku.csdn.net/doc/6401abf8cce7214c316ea27b?spm=1055.2635.3001.10343)
# 1. Ambarella H22芯片概述
Ambarella H22是一款先进的SoC芯片,它在视觉处理和A
STM32F4中断系统高级配置:库函数下的高效调试方法

参考资源链接:[STM32F4开发指南-库函数版本_V1.1.pdf](https://wenku.csdn.net/doc/6460ce9e59284
博通 WIFI6芯片调试技巧:专家级别的问题解决与调优秘籍

参考资源链接:[博通BCM6755:高性能WIFI6 SoC芯片详析](https://wenku.csdn.net/doc/595ytnkk26?spm=1055.2635.3001.10343)
# 1. WIFI6技术概述与芯片介绍
## WIFI6技
跨平台办公新时代:LibreOffice 7.1.8 AArch64的变革性体验
参考资源链接:[ARM架构下libreoffice 7.1.8预编译安装包](https://wenku.csdn.net/doc/2fg8nrvwtt?spm=1055.2635.3001.10343)
# 1. LibreOffice 7.1.8 AArch64简介
LibreOff
【版图设计实战】:CMOS反相器版图的先进工艺趋势与自动化工具应用
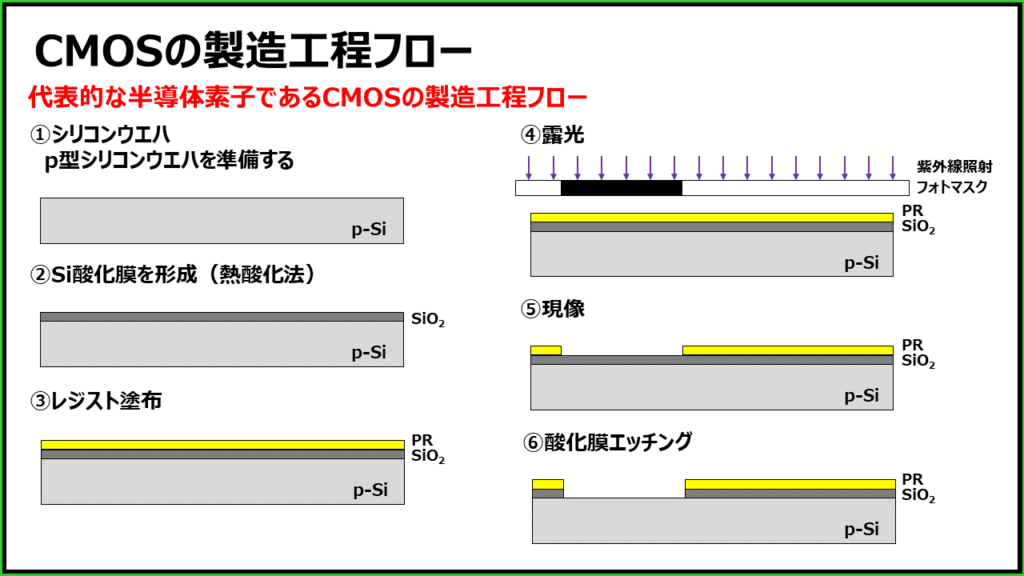
参考资源链接:[CMOS反相器版图设计原理与步骤](https://wenku.csdn.net/doc/7d3axkm5es?spm=1055.2635.3001.10343)
# 1. CMOS反相器的基础原理
## CMOS反相器简介
CMOS(Complementary Metal-Oxide-Semiconductor)反相器是数字集成电路中最基本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )