电机控制编程与调试:8051指令集应用全解析
发布时间: 2024-12-15 16:01:35 阅读量: 5 订阅数: 9 

FTP上传下载工具,支持上传下载文件夹、支持进度更新.7z
参考资源链接:[8051指令详解:111个分类与详细格式](https://wenku.csdn.net/doc/1oxebjsphj?spm=1055.2635.3001.10343)
# 1. 电机控制编程概述
电机控制编程是嵌入式系统领域的一个关键分支,它涉及使用软件指令来精确地操纵电机的行为。从简单的开启和关闭,到复杂的调速和定位控制,电机控制编程都扮演着至关重要的角色。随着技术的发展,电机控制已经不仅仅是单纯的物理操作,还包含了许多智能化的算法和数据处理技术,以实现更高效率和更精确的控制。在深入探讨8051指令集及其在电机控制中的应用之前,我们首先需要了解电机控制编程的基本概念和技术背景,为后面的技术细节和实际应用打下坚实的基础。
# 2. 8051指令集基础
## 2.1 8051指令集架构
### 2.1.1 CPU寄存器和工作原理
在深入探讨8051指令集之前,首先需要了解8051微控制器的CPU寄存器和它们的工作原理。8051 CPU有四个主要的寄存器组:累加器(ACC)、B寄存器、数据指针(DPTR)和程序计数器(PC)。累加器(ACC)是执行算术和逻辑操作的主要寄存器,B寄存器通常用作乘法和除法操作的辅助寄存器。DPTR用于处理外部数据存储和程序存储器,而PC则指向将要执行的下一条指令。
此外,还有通用寄存器R0至R7,它们被组织在四个寄存器组中,每组8个寄存器。通过选择不同的寄存器组,可以灵活地访问这些寄存器。8051的设计允许快速上下文切换,这对于中断服务例程尤其重要。
8051的寄存器是8位宽的,这意味着数据传输和算术运算都是以8位进行的。工作原理上,CPU从存储器中取出指令,解码指令,并执行相应的操作。指令的执行可能涉及数据寄存器、状态寄存器(如程序状态字PSW),以及其他特殊功能寄存器(如定时器和串行口寄存器)。
下面是一个简化的8051 CPU寄存器架构图:
```mermaid
graph TD
A[累加器ACC] -->|数据处理| B[算术/逻辑操作]
B --> C[结果]
D[程序计数器PC] -->|指向下一条指令| E[指令解码]
E --> B
F[数据指针DPTR] -->|外部数据和程序存储器访问| G[外部接口]
G -->|数据和指令| H[存储器]
I[通用寄存器R0-R7] -->|数据操作| B
J[状态寄存器PSW] -->|标志位控制| K[条件分支]
K --> E
L[特殊功能寄存器SFR] -->|控制硬件外设| M[外设]
```
### 2.1.2 指令集类型和格式
8051指令集包含多种类型的指令,它们可以分为数据传送指令、算术操作指令、逻辑操作指令、控制流指令和位操作指令。这些指令几乎都是单字节长度,少数指令是双字节。这种设计使得8051微控制器的代码密度很高。
8051指令格式通常包含操作码和操作数。操作码指明了CPU需要执行的操作类型,而操作数则提供执行该操作所需的数据或数据的存储位置。例如,数据传送指令通常将一个寄存器的内容传送到另一个寄存器或者从内存中取出数据到寄存器。
一个典型的8051指令格式如下:
```
操作码 操作数1 操作数2
```
例如,一个简单的数据传送指令:
```
MOV A, #55H
```
这条指令的含义是将立即数(即55H)移动(传送)到累加器A中。这个例子展示了8051指令集简洁且直接的特点。
下面是一个8051指令集的部分列表,展示了不同类型指令的使用:
```markdown
| 指令类型 | 指令示例 | 功能描述 |
|------------|--------------|----------------------------------------|
| 数据传送 | MOV A, R0 | 将寄存器R0的内容传送至累加器A |
| 算术操作 | ADD A, #30H | 将立即数30H加到累加器A的内容 |
| 逻辑操作 | ANL A, R1 | 将累加器A的内容与寄存器R1的内容进行逻辑与 |
| 控制流 | SJMP label | 短跳转到标签label处 |
| 位操作 | CLR P1.0 | 清除端口1的第0位 |
```
## 2.2 数据处理指令详解
### 2.2.1 数据传送指令
数据传送指令是8051指令集中最常用的一类,用于在寄存器之间、寄存器与内存之间以及立即数和寄存器或内存之间进行数据移动。这些指令不仅包括简单的一字节数据传送,还包括对存储器和寄存器组的选择以及数据块的传送。
数据传送指令的一般形式为:
```
MOV <目的>, <源>
```
例如,以下是一个将数据从寄存器R0传送至累加器A的示例代码:
```assembly
MOV A, R0
```
如果需要将数据从内存地址`0x20`移动到R1寄存器,则可以使用以下指令:
```assembly
MOV R1, 0x20
```
8051指令集中的数据传送指令具有许多变种,包括直接、间接和立即传送。它们在执行时不会影响任何标志位,这使得它们在设置和初始化寄存器时非常有用。
### 2.2.2 算术操作指令
8051提供了多种算术操作指令,包括加法、减法、乘法、除法、增1和减1等。这些操作对于处理控制逻辑中的计数和数值计算非常关键。算术操作指令不仅执行基本的数学运算,还可以影响到CPU的状态标志,如进位标志(C)、零标志(Z)和溢出标志(OV)。
例如,加法指令`ADD`将累加器中的值与指定的源相加,并将结果存回累加器。如果加法操作产生进位,则会设置进位标志。
```assembly
ADD A, R0 ; 将累加器A和寄存器R0中的值相加
```
乘法指令`MUL`执行乘法运算,结果是16位的,高8位存放在B寄存器中,低8位存放在累加器A中。
```assembly
MUL AB ; 将累加器A和寄存器B中的值相乘
```
算术操作是实现电机速度控制和位置计算中不可或缺的部分,因此深入理解这些指令是编写高效电机控制程序的关键。
### 2.2.3 逻辑操作指令
逻辑操作指令允许执行位级的运算,这对于实现复杂的控制逻辑和状态检查非常有用。这些指令包括AND、OR、XOR、NOT以及位清零和位设置操作。逻辑指令不会产生进位,但会影响零标志(Z)和奇偶校验标志(P)。
例如,执行逻辑与操作的AND指令:
```assembly
ANL A, #0x55 ; 将累加器A的内容与立即数0x55进行逻辑与操作
```
逻辑操作指令常用于检查特定的位是否被置为1(设置位)或0(清零位),这对于处理诸如传感器输入或控制信号的状态转换至关重要。
## 2.3 控制流指令和程序结构
### 2.3.1 条件分支指令
为了实现程序的决策逻辑,8051指令集提供了条件分支指令,允许程序根据某些条件跳转到不同的代码段执行。最常见的条件分支指令包括`JZ`(跳转如果零标志被设置)、`JNZ`(跳转如果零标志未被设置)、`JC`(跳转如果进位标志被设置)等。
这些指令对于根据电机的运行状态来选择不同的控制路径至关重要。例如,如果一个电机到达指定位置,可以使用`JZ`指令来检查零标志是否被设置,并跳转到相应的处理例程。
```assembly
JZ label ; 如果零标志被设置,跳转到标签label处
```
### 2.3.2 循环控制指令
循环控制指令使得能够实现重复执行的操作序列,直到满足特定的条件。`DJNZ`(减少并跳转如果非零)指令是一种常用的循环控制指令,它将指定寄存器的值减1,如果结果非零,则跳转到指定的地址。
在电机控制应用中,`DJNZ`可以用于执行固定次数的循环,例如,对步进电机进行精确控制。
```assembly
MOV R2, #10 ; 初始化计数器R2为10
loop: ; 循环开始标签
; 执行一些操作...
DJNZ R2, loop ; R2减1,如果R2非零则跳转回loop标签
```
### 2.3.3 子程序和中断处理指令
子程序(或函数)允许程序员将重复使用的代码块定义为一个单独的代码块,并在需要时调用。8051通过`CALL`指令和`RET`指令支持子程序调用和返回。使用子程序可以提高代码的可读性和可维护性。
此外,8051的中断处理指令`INT`和`RETI`允许程序响应外部或内部事件。中断发生时,当前执行的程序会暂停,处理器保存当前状态,并跳转到相应的中断服务例程执行。完成后,使用`RETI`指令返回到之前暂停的位置继续执行。
```assembly
; 中断服务例程示例
ORG 0030H
INT_SERVICE:
; 中断处理代码...
RETI
```
使用中断可以极大地提高电机控制系统的响应速度和效率。通过设计适当的中断优先级和中断服务例程,系统可以更加灵活地响应不同的控制需求。
在此基础上,本章节对8051指令集架构及各类数据处理指令进行了详尽的阐述。这为后续章节中电机控制逻辑的实

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Romax载荷谱案例深度研究】:从实战中精通载荷谱分析技巧

参考资源链接:[Romax软件教程:DC1模块-载荷谱分析与处理](https://wenku.csdn.net/doc/4tnpu1h6n7?spm=1055.2635.3001.10343)
# 1. 载荷谱分析的基本原理
## 1.1 载荷谱的定义与重要性
载荷谱分析是结构工程和力学领域
【LTSPICE基础入门】:电子工程师的模拟电路仿真指南
参考资源链接:[LTSPICE详尽教程:从入门到高级功能](https://wenku.csdn.net/doc/nqr8pvs0kw?spm=1055.2635.3001.10343)
# 1. LTSpice简介与安装
## LTSpice简介
LTSpice是一个高性能的SPICE仿真软件,由Linear Technology公司开发,广泛应用于电子电路设计和分析。它以其强大
图层混合模式全面解析:颜色互动的艺术
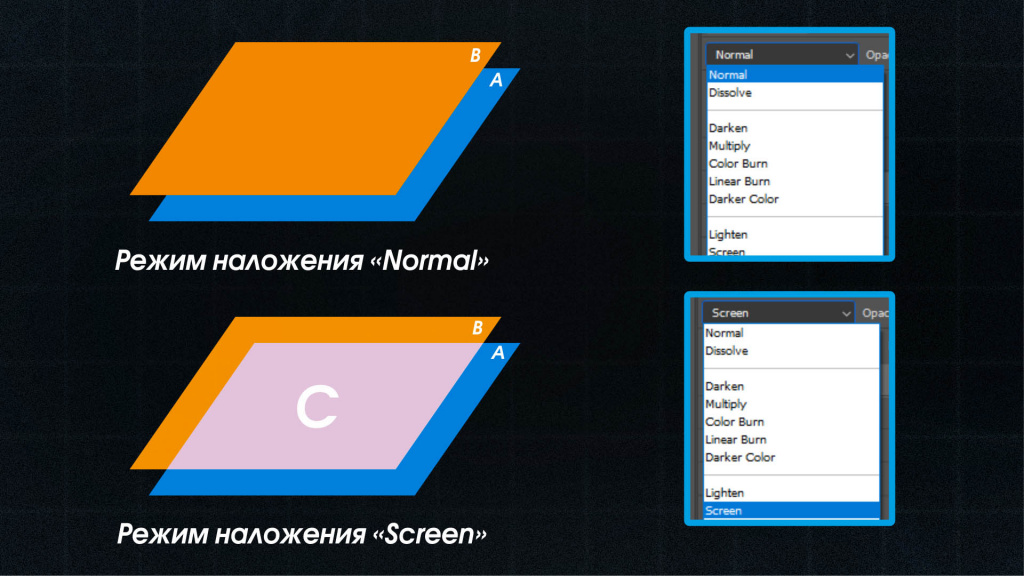
参考资源链接:[Origin8.5 图层管理教程:调整大小与位置](https://wenku.csdn.net/doc/38n32u79fn?spm=1055.2635.3001.10343)
# 1. 图层混合模式的基本概念
在数字图形编辑中,图层混合模式是一种用于图像合成的核心技术,它允许两个或更多图层的颜色和透明
S7-1200技术深究:BYTE转char转换的自动化实现与优化

参考资源链接:[S7-1200转换BYTE到char及Char_TO_Strg指令应用解析](https://wenku.csdn.net/doc/51pkntrszz?spm=1055.2635.3001.10343)
# 1. S7-1200 PLC与BYTE转char转换基础
在自动化控制系统中,西门子S7-1200 PLC
FOCAS工程管理手册:最佳实践与自动化测试集成

参考资源链接:[FANUC FOCAS函数API测试工程详解](https://wenku.csdn.net/doc/6412b4fbbe7fbd1778d41859?spm=1055.2635.3001.10343)
# 1. FOCAS工程管理概述
在当今快速发展的IT行业中,工程管理的效率直接影响项目交付的质量和速度。FOCAS工程管理作为一种现代化的管理方法,通过整合资源、优化流程和强化团队协作,
ImSL 7.0跨平台安装:Windows、Linux、macOS一步到位
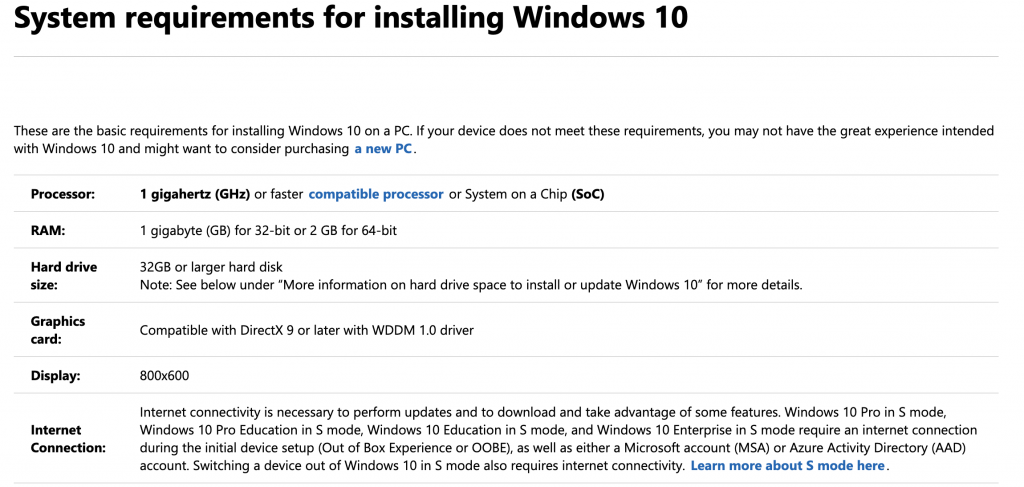
参考资源链接:[IMSL7.0安装全攻略:Win10+VS2010+IVF2013](https://wenku.csdn.net/doc/6412b67abe7fbd1778d46df3?spm=1055.2635.3001.10343)
# 1. ImSL 7.0跨平台安装概述
欢迎来到探讨 ImSL 7.0 跨平台
Element-UI布局与数据可视化:打造直观且响应式的交互体验

参考资源链接:[Element-UI弹性布局教程:使用el-row和el-col实现自动换行](https://wenku.csdn.net/
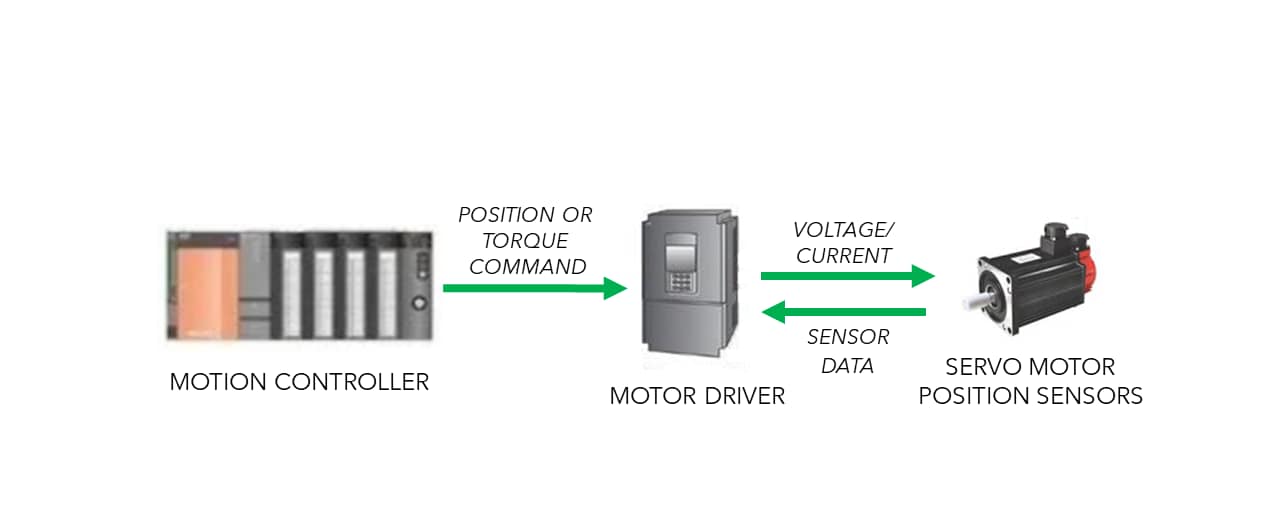
ACS运动控制安全性指南:保障系统稳定的5项最佳实践
参考资源链接:[ACS运动控制快速调试指南](https://wenku.csdn.net/doc/6412b753be7fbd1778d49e42?spm=1055.2635.3001.10343)
# 1. 运动控制与安全性概述
在自动化技术飞速发展的当下,运动控制作为其中的核心组成部分,其在工业生产、机器人技术、航空航天等领域发挥着至关重要的作用。运动控制系统的安全性则是确保整个生产流程可靠、高效与无事故的关键。本
Python文件操作全攻略:提升数据读写效率的秘诀
参考资源链接:[传智播客&黑马程序员PYTHON教程课件汇总](https://wenku.csdn.net/doc/6412b749be7fbd1778d49c25?spm=1055.2635.3001.10343)
# 1. Python文件操作基础
在这一章节中,我们将介绍Python中最基本的文件操作。Python提供了丰富的内置函数,使得进行文件读写变得简单而高效。我们将从最基础
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )