8051微控制器新手必看:从零基础到精通的指令集与开发速成课
发布时间: 2024-12-15 14:28:24 阅读量: 5 订阅数: 9 

8051微控制器.rar-综合文档
参考资源链接:[8051指令详解:111个分类与详细格式](https://wenku.csdn.net/doc/1oxebjsphj?spm=1055.2635.3001.10343)
# 1. 8051微控制器概述
## 微控制器简介
微控制器(Microcontroller Unit, MCU)是一种集成处理器核心、内存、输入输出接口以及其他可编程逻辑的单片机。它的目的是为了执行特定任务而设计,在控制系统中扮演着中心处理单元的角色。
## 8051微控制器的历史
8051微控制器是早期一款成功的8位微控制器,由英特尔在1980年推出。其架构简单但功能强大,广泛应用于嵌入式系统的开发,为后续各种微控制器的设计奠定了基础。
## 8051的特点与优势
8051微控制器拥有一系列特点,如:固定大小的8位数据总线、简单的指令集、8位累加器、可编程的I/O端口、串行通信接口等。其优势在于结构稳定、成本低廉、开发工具丰富,使得它在工业控制、消费电子等多个领域至今仍广泛应用。
```mermaid
flowchart LR
A[8051微控制器特点] -->|数据总线| B[8位数据总线]
A -->|指令集| C[简单指令集]
A -->|累加器| D[8位累加器]
A -->|I/O端口| E[可编程I/O端口]
A -->|通信接口| F[串行通信接口]
```
以上流程图展现了8051微控制器的核心特点,它能够帮助读者快速理解8051微控制器的基本架构及其优势所在。在接下来的章节中,我们将深入探讨8051微控制器的基础指令集及其在实际应用中的使用方法。
# 2. 8051微控制器基础指令集
## 2.1 数据传输指令
### 2.1.1 寄存器和内存数据操作
8051微控制器的数据传输指令是微控制器编程中最基本的指令集之一。这些指令负责在寄存器之间以及寄存器与内存之间移动数据。理解这些操作是学习更高级指令的前提。
在8051微控制器中,寄存器组由多个8位寄存器组成,这些寄存器通常被标记为R0到R7。此外,还有一些特殊功能寄存器(SFRs),如累加器(A)、程序计数器(PC)和状态寄存器(PSW)等,它们具有特定用途。
数据传输的一个基本操作示例是将数据从一个寄存器移动到另一个寄存器。例如,`MOV` 指令可以将一个8位立即数、一个寄存器的值或一个内存单元的内容移动到指定的寄存器中。
```
MOV A, #01H ; 将立即数01H移动到累加器A
MOV R0, A ; 将累加器A的内容移动到寄存器R0
```
另一个常见的数据传输指令是`MOVX`,它用于访问外部数据存储器。例如:
```
MOVX @DPTR, A ; 将累加器A的内容移动到由数据指针DPTR指定的外部存储器地址
```
### 2.1.2 常用数据传输指令详解
数据传输指令可以分为几个子类别,包括立即寻址、直接寻址、寄存器间直接寻址和间接寻址。了解这些寻址模式对于正确使用数据传输指令至关重要。
**立即寻址模式**,例如:
```
MOV A, #20H ; 将立即数20H加载到累加器A
```
在**直接寻址模式**中,操作数直接给出内存地址:
```
MOV A, 30H ; 将内存地址为30H的数据加载到累加器A
```
**寄存器间直接寻址**,通常用于寄存器之间或者寄存器与特定内存位置之间的数据移动:
```
MOV 30H, 20H ; 将内存地址为20H的数据移动到内存地址为30H的位置
```
最后,**间接寻址模式**通过使用寄存器(比如间接寄存器R0或R1)的内容作为地址来访问内存:
```
MOV A, @R0 ; 将间接寄存器R0指向的内存地址的数据加载到累加器A
```
理解每种寻址模式的工作原理和适用场景是编写高效8051汇编程序的关键。
## 2.2 算术运算指令
### 2.2.1 加法和减法指令
算术运算指令允许微控制器执行基本的数学运算,这对于实现各种算法至关重要。加法和减法是这些指令中最常用的,因为它们是构成更复杂数学运算的基础。
加法操作是通过`ADD`指令实现的,它将两个数相加并存储结果。例如:
```
MOV A, #30H ; 将数值30H加载到累加器A中
ADD A, #20H ; 将数值20H加到累加器A中,结果存储在A中
```
如果两个数相加的结果超出了8位范围,就会发生溢出。在这种情况下,进位标志(CY)将被设置,这可以在程序中用于错误检测或特殊条件处理。
减法操作则由`SUBB`指令完成,它从累加器中减去一个数,并将差值存储回累加器。例如:
```
MOV A, #50H ; 将数值50H加载到累加器A中
SUBB A, #20H ; 从累加器A中减去数值20H,结果存储在A中
```
在执行减法时,如果被减数小于减数,则差值将为负数,并且借位标志(B)会被设置。
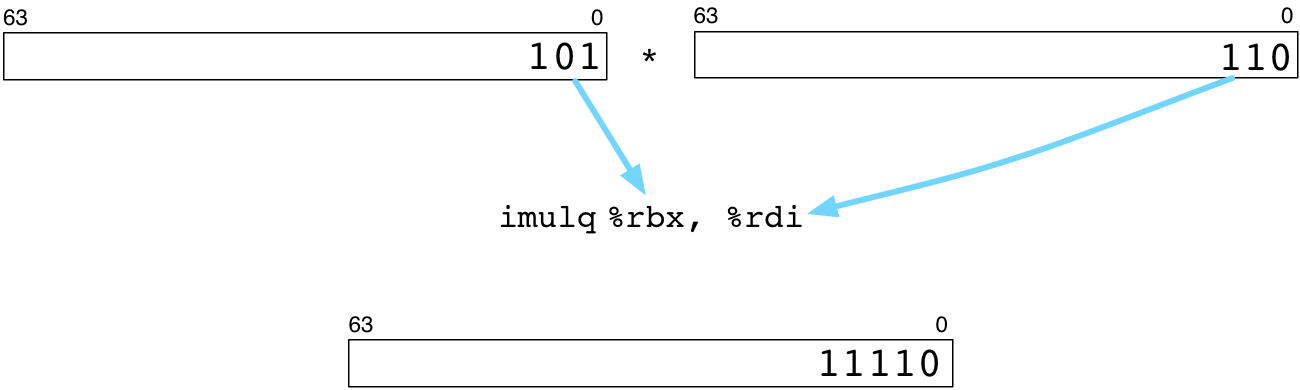
### 2.2.2 乘法和除法指令
在8051微控制器中,乘法和除法操作不像加法和减法那样频繁使用,但它们对于实现更复杂的数学模型仍然很有帮助。乘法通过`MUL AB`指令执行,它将累加器A和B寄存器的内容相乘,并将16位结果存储在累加器A和B中:
```
MOV A, #04H
MOV B, #03H
MUL AB ; A * B,结果0C0H存储在A中(低字节),00H存储在B中(高字节)
```
除法则通过`DIV AB`指令完成,将累加器A的内容除以B寄存器的内容,并将结果存储在A和B中:
```
MOV A, #0C0H ; 结果的低字节
MOV B, #03H ; 除数
DIV AB ; A / B,商存储在A中,余数存储在B中
```
这些操作通常用于程序中的数学计算或数据处理任务。需要注意的是,如果进行乘法或除法操作的结果超出了寄存器的范围,可能会导致不可预知的行为,因此在编写程序时必须进行检查。
## 2.3 逻辑与位操作指令
### 2.3.1 位操作指令的基础
位操作指令是处理单个位信息的强大工具,它们在设置、清除、切换位以及测试单个位的状态时非常有用。8051微控制器提供了丰富的位操作指令集。
最基础的位操作之一是`CLR`指令,用于清除(即将其设置为0)指定的位。例如:
```
CLR P1.0 ; 清除端口1的第一个位
```
与之相对的`SETB`指令则用于设置(即将其设置为1)指定的位:
```
SETB P1.0 ; 设置端口1的第一个位
```
`CPL`指令用于切换指定位的状态(即将0变为1或1变为0):
```
CPL P1.0 ; 切换端口1的第一个位的状态
```
8051微控制器的每个SFR都有位地址,这使得位操作非常方便。例如,可以对状态寄存器PSW中的进位标志CY位进行操作:
```
CLR CY ; 清除进位标志
SETB CY ; 设置进位标志
CPL CY ; 切换进位标志的状态
```
位操作的直接结果是可以在硬件控制中实现快速响应,如控制LED的亮灭、读取开关状态等。
### 2.3.2 逻辑运算的实现
逻辑运算指令在处理二进制数据和进行布尔逻辑运算时非常有用。8051微控制器支持逻辑与、或、非和异或等基本逻辑运算。
逻辑与操作由`ANL`指令实现,它将两个操作数进行按位与运算:
```
ANL P1, #0FEH ; 将端口1的所有位与0FEH进行按位与运算
```
逻辑或操作由`ORL`指令完成,执行按位或运算:
```
ORL P1, #01H ; 将端口1的所有位与01H进行按位或运算
```
逻辑非操作通过`CPL`指令执行,它对单个位进行取反运算,这一点在前文的位操作部分已经提到了。
逻辑异或操作由`XRL`指令完成,用于执行按位异或运算:
```
XRL P1, #01H ; 将端口1的所有位与01H进行按位异或运算
```
这些逻辑运算指令可以用于多种场景,如条件检查、数据处理、逻辑控制等。
## 2.4 控制转移指令
### 2.4.1 无条件跳转和条件跳转
控制转移指令允许程序改变默认的顺序执行流程,实现条件和无条件的跳转。这些指令对于实现循环、分支、子程序调用和中断处理等控制结构是必需的。
无条件跳转由`LJMP`指令实现,它会立即跳转到指定的程序存储器地址。例如:
```
LJMP START ; 无条件跳转到标签START所在的地址
```
在8051微控制器中,条件跳转的指令包括`JZ`、`JNZ`、`JC`等,分别用于跳转到指定地址当结果为零、非零或进位标志被设置时。
```
JZ LABEL ; 如果上一个操作的结果是零,则跳转到LABEL
JNZ LABEL ; 如果上一个操作的结果非零,则跳转到LABEL
JC LABEL ; 如果进位标志被设置,则跳转到LABEL
```
条件跳转通常与比较指令结合使用,用于实现程序中的分支逻辑。
### 2.4.2 循环控制与子程序调用
循环控制通常通过使用条件跳转指令和标签实现。例如,一个简单的计数器循环可以通过以下指令实现:
```
MOV R0, #10 ; 初始化寄存器R0为10
LOOP: DJNZ R0, LOOP ; 当R0非零时,减1并跳转回LOOP标签
```
在上面的例子中,`DJNZ`指令是一个特殊的减法指令,它在减一之后检查结果是否为零,如果不为零则跳转到指定标签。
子程序调用通过`CALL`指令完成,它将当前位置压栈,并跳转到子程序的起始地址。返回则通过`RET`指令从子程序跳回原调用位置。
```
CALL SUBROUTINE ; 调用名为SUBROUTINE的子程序
SUBROUTINE:
... ; 子程序的代码
RET ; 返回到调用子程序的位置
```
使用子程序可以提高代码的可读性和可维护性,同时也是复用代码的有效方式。在编写程序时,合理使用循环控制和子程序调用对于设计高效和模块化的代码至关重要。
在接下来的章节中,我们将深入探讨8051微控制器的高级指令集以及如何搭建开发环境进行实际开发。通过本章节的介绍,我们已经打下了坚实的基础,可以准备进行更深入的学习和实践了。
# 3. 8051微控制器高级指令集
## 3.1 中断处理指令
### 3.1.1 中断系统的概念和配置
中断处理是微控制器设计中的一个重要组成部分,它允许微控制器响应实时事件。8051微控制器拥有两个外部中断和两个定时器中断,为系统的实时操作提供了基础。理解中断系统的配置,包括中断优先级、中断向量和中断使能寄存器是编写高效中断服务程序的关键。
在8051微控制器中,中断系统由中断使能寄存器(IE)和中断优先

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ADS滤波器设计全攻略】:新手必备的12个基础知识
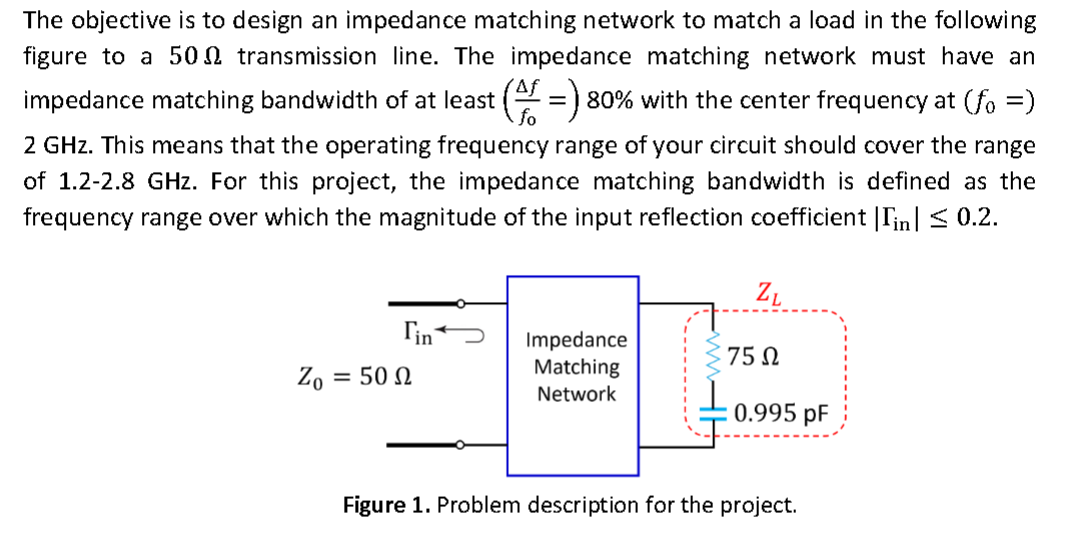
参考资源链接:[ads 差分滤波器设计及阻抗匹配](https://wenku.csdn.net/doc/6412b59abe7fbd1778d43bd8?spm=1055.2635.3001.10343)
# 1. ADS滤波器设计概述
在无线通信、雷达系统以及信号处理领域,滤波器是实现信号选择性传输的核心组件。ADS(Advanced Design System)是一款功能强大的
【模拟信号转数字】:电压电流信号采集技术要点,让你秒变数据采集高手
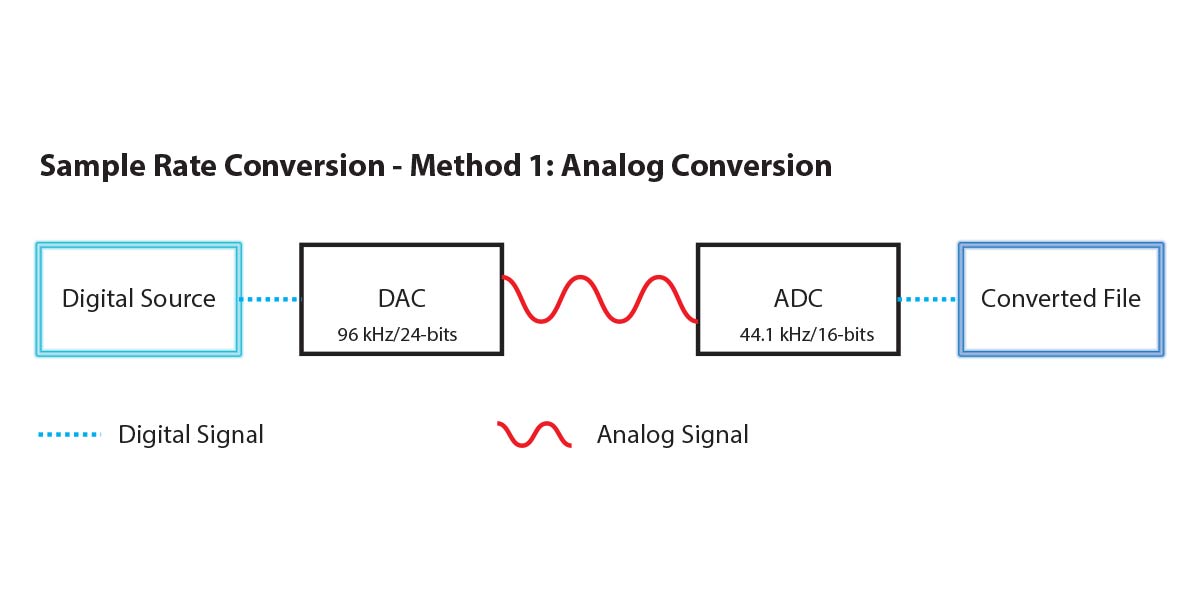
参考资源链接:[STM32 ADC应用:太阳能电池板电压电流监测与数码管显示](https://wenku.csdn.net/doc/6412b75abe7fbd1778d49fed?spm=1055.2635.3001.10343)
# 1. 模拟信号与数字信号的基本概念
## 1.1 模拟信号的特性
模拟信号是时间连续且值连续的信号,它们可以通过连续变化的电压或电流来表示信息,例如人的声音和乐器的声音在麦克风中转换为电信
【CUDA vs OpenCL】:深度剖析选择GPGPU框架的决定性因素
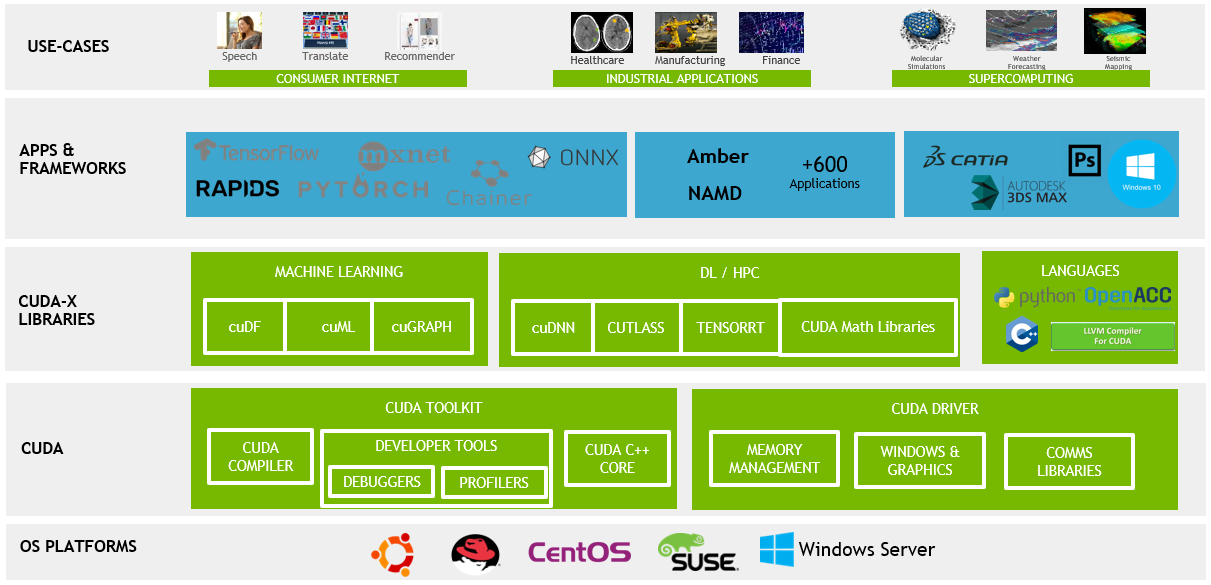
参考资源链接:[GPGPU编程模型与架构解析:CUDA、OpenCL及应用](https://wenku.csdn.net/doc/5pe6wpvw55?spm=1055.2635.3001.10343)
# 1. CUDA与OpenCL框架概述
## 1.1 GPU计算的崛起
随着计算需求的不断提升,GPU(图形处理单元)已从单纯的图形渲染扩展到科学
Ambarella H22芯片全解析:如何在90天内实现性能跃升与系统优化
参考资源链接:[Ambarella H22芯片规格与特性:低功耗4K视频处理与无人机应用](https://wenku.csdn.net/doc/6401abf8cce7214c316ea27b?spm=1055.2635.3001.10343)
# 1. Ambarella H22芯片概述
Ambarella H22是一款先进的SoC芯片,它在视觉处理和A
STM32F4中断系统高级配置:库函数下的高效调试方法

参考资源链接:[STM32F4开发指南-库函数版本_V1.1.pdf](https://wenku.csdn.net/doc/6460ce9e59284
博通 WIFI6芯片调试技巧:专家级别的问题解决与调优秘籍

参考资源链接:[博通BCM6755:高性能WIFI6 SoC芯片详析](https://wenku.csdn.net/doc/595ytnkk26?spm=1055.2635.3001.10343)
# 1. WIFI6技术概述与芯片介绍
## WIFI6技
跨平台办公新时代:LibreOffice 7.1.8 AArch64的变革性体验
参考资源链接:[ARM架构下libreoffice 7.1.8预编译安装包](https://wenku.csdn.net/doc/2fg8nrvwtt?spm=1055.2635.3001.10343)
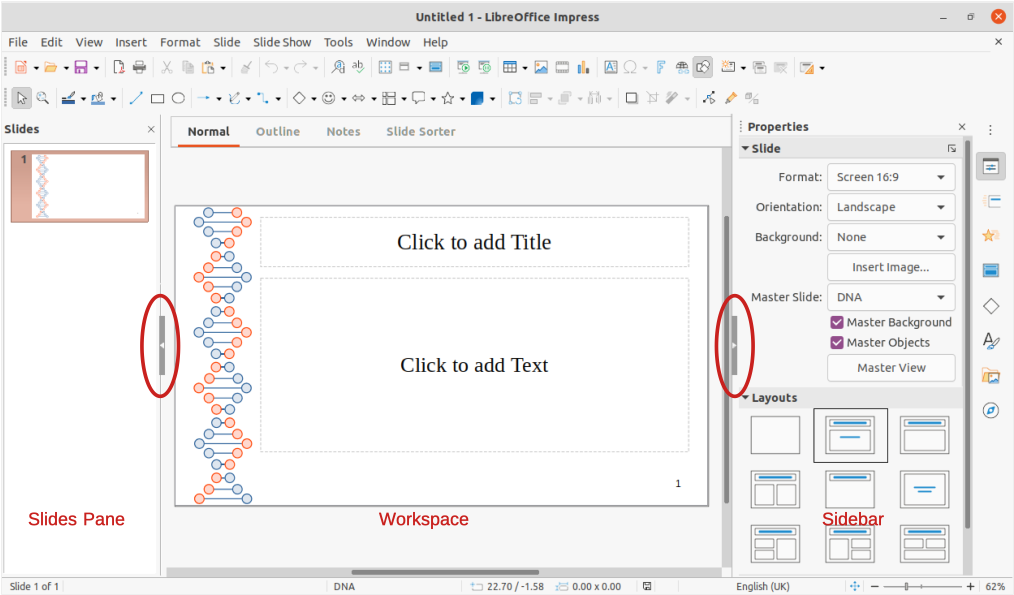
# 1. LibreOffice 7.1.8 AArch64简介
LibreOff
【版图设计实战】:CMOS反相器版图的先进工艺趋势与自动化工具应用
参考资源链接:[CMOS反相器版图设计原理与步骤](https://wenku.csdn.net/doc/7d3axkm5es?spm=1055.2635.3001.10343)
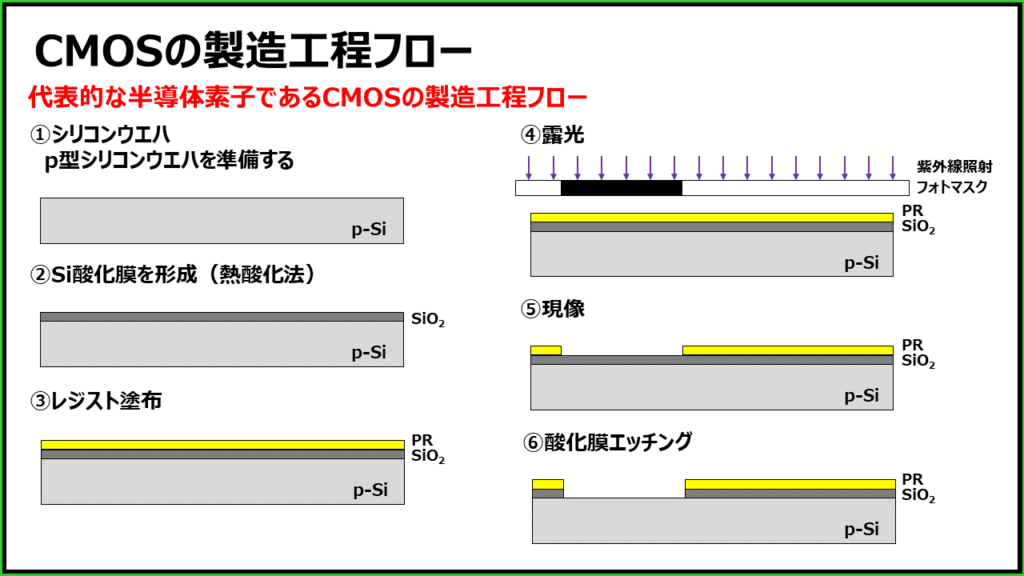
# 1. CMOS反相器的基础原理
## CMOS反相器简介
CMOS(Complementary Metal-Oxide-Semiconductor)反相器是数字集成电路中最基本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )