stm32驱动舵机转速【教程与资源】工业控制开发板上的应用,如遥控坦克
发布时间: 2024-03-19 15:16:55 阅读量: 69 订阅数: 55 
# 1. STM32驱动舵机介绍
在工业控制领域,舵机是一种常用的执行元件,用于实现角度或位置控制。而STM32作为一种强大的嵌入式微控制器,被广泛应用于各种控制系统中。本章将介绍STM32驱动舵机的基本概念与原理。
# 2. 舵机速度控制教程
舵机在工业控制和机器人领域应用广泛,其速度控制是控制舵机运动的重要功能之一。本章将介绍如何利用STM32来实现舵机速度控制的教程。
#### 2.1 驱动舵机的基本原理
舵机通过接收PWM信号来控制其角度和速度。PWM(脉冲宽度调制)是一种通过不同占空比的脉冲信号来控制舵机运动的方式。
#### 2.2 使用STM32编写舵机控制程序
下面是一个使用STM32和STM32CubeIDE编写的控制舵机速度的示例代码(使用C语言):
```c
#include "stm32f4xx_hal.h"
TIM_HandleTypeDef htim2;
void SystemClock_Config(void);
int main(void) {
HAL_Init();
SystemClock_Config();
htim2.Instance = TIM2;
htim2.Init.Prescaler = 84-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 20000;
HAL_TIM_PWM_Init(&htim2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
while (1) {
for (int i = 1000; i <= 2000; i += 100) {
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, i);
HAL_Delay(1000);
}
}
}
void SystemClock_Config(void) {
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSIState = RCC_HSI_OFF;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0);
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / 1000
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
本专栏以"stm32驱动舵机转速"为主题,详细介绍了在控制舵机运动过程中所涉及的各种原理、方法和实现技巧。从PWM控制舵机转速到定时器外设输出脉冲信号,再到控制电路接收信号源的控制脉冲,覆盖了舵机控制的方方面面。文章还深入讨论了如何在STM32中实现舵机的正反转、多个舵机同时运动及调速、驱动转向和调整角度等功能。通过使用定时器输出周期为20ms的脉冲信号、控制PWM波的占空比以及CubeMX配置定时器与PWM输出等方式,读者可以全面了解如何实现舵机转速控制。此外,专栏还提供了主函数和舵机代码的编写方法,并分享了视频教程和工业控制开发板上的应用实例,如遥控坦克,帮助读者更好地掌握舵机控制的实践技能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MOXA串口服务器故障全解】:常见问题与解决方案速查手册

# 摘要
本文对MOXA串口服务器的使用和维护进行了系统的介绍和分析。首先概述了MOXA串口服务器的基本功能与重要性。随后,本文详细探讨了故障诊断与排查的基础知识,包括理解串口通信原理和MOXA设备工作模式,以及如何通过检查硬件和使用命令行工具进行故障排查。接着,文章重点讨论了串口服务器的常见问题及其解决方案,涵盖了通信、网络和系统配置方面的问题。在高级故障排
GC理论2010全解析:斜率测试新手快速入门指南

# 摘要
本论文旨在全面回顾2010年垃圾回收(GC)理论的发展,并探讨其在现代编程语言中的应用。首先,文章概述了GC的基本原理,包括其历史演变、核心概念以及性能评估方法。其次,论文重点介绍了GC理论的关键创新点,比如增量式、并行和混合式垃圾回收算法,并分析了它们的技术挑战和适用场景。为了进一步理解和评估GC的
GS+ 代码优化秘籍:提升性能的8大实战技巧
# 摘要
本文深入探讨了GS+代码优化的各个方面,旨在提升软件性能和效率。第一章概述了性能优化的重要性。第二章详细介绍了性能分析的基础知识,包括识别性能瓶颈、代码剖析技术和性能度量指标。第三章聚焦于实战技巧,涵盖了数据结构优化、算法效率提升、并行处理和多线程、以及缓存的利用与管理。第四章探讨了高级性能优化技术,包括异步编程模式、代码重构与模式应用、硬件加速技术。第五章通过案例研究与总结,提供性能优化的最佳实践,并评估优化策略的效果。本文旨在为软件开发者提供一套完整的性能优化框架和实用工具,以应对多样化的性能挑战。
# 关键字
性能分析;代码优化;数据结构;并行处理;异步编程;硬件加速;缓存管
【数据驱动的CMVM优化】:揭秘如何通过数据分析提升机床性能

# 摘要
随着技术的进步,数据驱动的CMVM(Configuration Management and Versioning Model)优化已经成为提高企业资产管理效率和质量的重要手段。本文概述了CMVM优化的整个流程,包括性能数据的收集与管理、数据分析的理论基础及应用,以及优化策略的制定和实施。文章深入探讨了数据收集的技术工具、数据存储与管理策略、数据清洗
【西门子SITOP电源效率提升指南】:系统性能的关键优化步骤

# 摘要
本文深入研究了西门子SITOP电源的效率、性能参数及优化策略。首先概述了电源效率的基础理论,探讨了效率的定义、重要性以及提升效率的理论方法,接着重点分析了西门子SITOP电源的关键性能参数和性能测试方法。文章深入挖掘了硬件和软件优化策略以及系统集成优化的方法,并通过案例研究分享了实践
【性能优化实战】:提升俄罗斯方块游戏运行效率的10大策略
# 摘要
本文针对俄罗斯方块游戏性能优化进行了综合探讨,涉及渲染性能、游戏逻辑、数据结构、内存管理以及并发与网络通信等方面的优化策略。通过分析渲染引擎核心原理、图形处理与资源管理技术、硬件加速和多线程渲染的优势,本文深入探讨了提升游戏性能的技术手段。同时,文章对游戏逻辑代码和数据结构的选择进行了优化分析,以及介绍了内存分配、
云服务模型全解析:IaaS、PaaS、SaaS的区别与最优应用策略
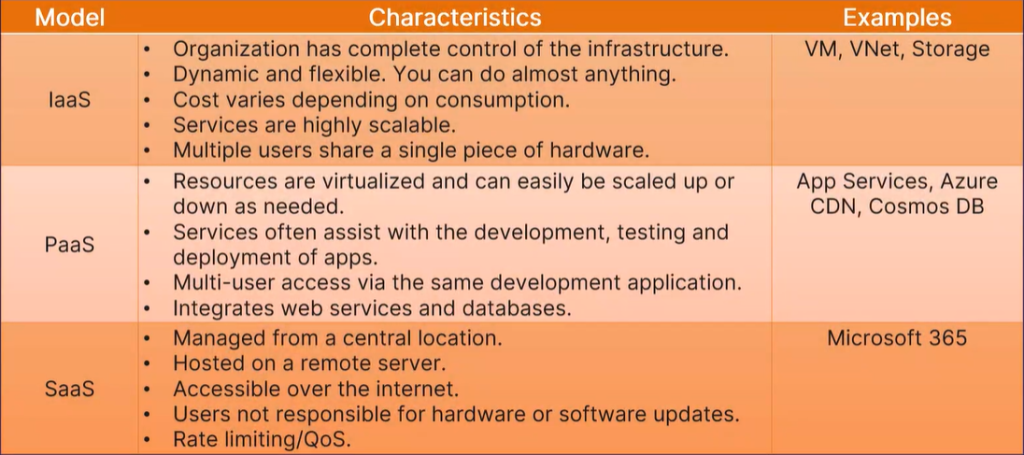
# 摘要
云计算作为一种新兴的计算模式,已经成为企业IT架构的重要组成部分。本文系统地概述了云服务的三种主要模型:IaaS、PaaS和SaaS,并详细探讨了它们的架构特性、技术细节、业务价值以及应用场景
优化至上:MATLAB f-k滤波器性能提升的8大策略
# 摘要
本论文对MATLAB环境下的f-k滤波器进行了系统的研究,涵盖了其基本原理、性能提升的理论基础、实践技巧以及在不同领域的应用效果。文章首先介绍了f-k滤波器的基本工作原理和数学模型,随后深入探讨了提升其性能的关键参数分析和理论方法。接着,通过算法效率、数据处理改进及资源管理与分配优化等实践技巧,探讨了如何在实际应用中提高f-k滤波器的性能。此外,文章还研究了f-
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )