Common Methods for Numerical Solution of Ordinary Differential Equations
发布时间: 2024-09-14 22:49:47 阅读量: 27 订阅数: 21 
# 1. Overview of Ordinary Differential Equations
## Definition of Ordinary Differential Equations
An ordinary differential equation is an equation that describes the relationship between the derivative(s) of an unknown function with respect to a single independent variable and the function itself. It is a fundamental theory in mathematics, physics, engineering, and other fields, often used to describe the laws of change in natural phenomena. Ordinary differential equations are commonly used to establish mathematical models, allowing predictions or explanations of various phenomena through equation solving.
## Classification of Ordinary Differential Equations
Depending on characteristics such as order, linearity, coefficient type, and equation type, ordinary differential equations can be classified into various types, including first-order equations, higher-order equations, linear equations, nonlinear equations, constant coefficient equations, and variable coefficient equations.
## Applications of Ordinary Differential Equations
Ordinary differential equations are widely applied in physics, engineering, biology, economics, and other fields. For example, Newton's second law can be expressed as an ordinary differential equation, and the change in current in a circuit can also be described by an ordinary differential equation. In biology, phenomena such as population growth and species competition can be modeled and predicted using ordinary differential equations.
# 2. Overview of Numerical Solution Methods
Numerical solution methods are an essential part of numerical solutions for ordinary differential equations. This chapter will introduce the basic principles, classifications, and advantages and disadvantages of numerical methods.
### Basic Principles of Numerical Methods
The basic principle of numerical methods is to transform continuous ordinary differential equations into discrete systems of equations and solve them approximately using computers. The core idea is to discretize continuous variables such as time and space, transforming the problem into calculations at a finite number of discrete points.
### Classification of Numerical Solution Methods
Depending on their basic principles and operational methods, numerical solution methods can be divided into several categories:
1. **Single-step methods**: ***mon single-step methods include the Euler method and the modified Euler method.
2. **Multistep methods**: ***mon multistep methods include the Adams-Bashforth method and the Adams-Moulton method.
3. **Runge-Kutta methods**: These methods use information from multiple intermediate points to calculate the value of the next point, achieving higher accuracy and stability.
4. **Adaptive step size methods**: These methods automatically adjust the step size based on the current solution's accuracy and stability, improving the efficiency and accuracy of the solution.
### Advantages and Disadvantages of Numerical Methods
Numerical solution methods have the following advantages:
- **Flexibility**: Numerical methods can be applied to various types of ordinary differential equations and can be adjusted and optimized according to specific problems.
- **Reliability**: Numerical methods have been extensively researched and practiced over the years and have been widely applied and verified, ensuring high reliability.
- **Efficiency**: Numerical methods can efficiently solve problems using computers, significantly reducing the time required for solutions.
Numerical solution methods also have some disadvantages:
- **Accumulation of errors**: Numerical methods introduce certain errors in each iteration, and as the number of iterations increases, these errors can accumulate, affecting the accuracy of the results.
- **Boundary problems**: Some numerical methods are not flexible enough in handling boundary problems, potentially leading to inaccurate solutions.
- **Convergence issues**: Some numerical methods may experience convergence problems under certain conditions, requiring careful selection and adjustment of parameters.
In summary, numerical solution methods are an important part of numerical solutions for ordinary differential equations. Different numerical methods have different applications and characteristics, requiring selection and optimization based on specific problems. In practical applications, it is necessary to consider factors such as solution accuracy, computational efficiency, and stability to choose the appropriate numerical solution method.
# 3. Euler's Method
Euler's method is a commonly used numerical solution method for ordinary differential equations, based on the principle of discretizing differential equations. The following will introduce the algorithm, stability, and convergence analysis of Euler's method.
#### Principles of Euler's Method
The principle of Euler's method is to replace the derivative in the differential equation with a finite difference, transforming the differential equation into a recursive iterative format. For a first-order ordinary differential equation dy/dx = f(x, y), Euler's method can be used to approximate the solution. First, discretize the range of the independent variable x, then iterate using the formula y_{n+1} = y_n + h*f(x_n, y_n), where h is the step size and n is the number of iterations. This allows for the step-by-step calculation of the differential equation's solution.
#### Algorithm of Euler's Method
The Euler method's algorithm can be simply described as follows:
```
1. Initialize the initial values of the independent variable x_0 and the dependent variable y_0.
2. Set the step size h.
3. For each iteration step n:
- Calculate the next independent variable value x_{n+1} = x_n + h.
- Calculate the next dependent variable value y_{n+1} = y_n + h*f(x_n, y_n).
4. Obtain the sequence of numerical solutions {(x_0, y_0), (x_1, y_1), (x_2, y_2), ...}.
```
#### Stability and Convergence Analysis of Euler's Method
The stability and convergence of Euler's method depend on the choice of step size h. Typically, Euler's method is unstable, especially when dealing with stiff equations or higher-order equations. Moreover, Euler's method has poor convergence properties and may require an extremely small step size to achieve accurate numerical solutions. Therefore, Euler's method often needs to be combined with adaptive step size techniques in practical applications to improve the accuracy and stability of numerical solutions.
I hope this provides a preliminary understanding of Euler's method.
# 4. Improved Euler's Method
### Principles of Improved Euler's Method
The improved Euler's method is a commonly used numerical method for solving ordinary differential equations, representing an improvement and optimization of the Euler method. The improved Euler's method uses a more accurate approximation method to calculate the value of the next step, thereby increasing the accuracy of the numerical solution.
### Algorithm of Improved Euler's Method
The basic algorithm for the improved Euler's method is as follows:
1. Calculate the initial values based on the initial conditions.
2. For each step, use the following formula to calculate the value of the next step:
`y[i+1] = y[i] + h * f(x[i] + h/2, y[i] + (h/2) * f(x[i], y[i]))`
Where h is the step size, x[i] and y[i] are the values of the current step, and f is the derivative function of the equation.
3. Repeat step 2 until reaching the specified termination condition.
### Example Application of Improved Euler's Method
Below is a simple example of using the improved Euler's method to solve an ordinary differential equation.
```python
import math
def f(x, y):
return x**2 + y
def improved_euler_method(h, x0, y0, xn):
num_steps = int((xn - x0) / h)
x_values = [x0]
y_values = [y0]
for i in range(num_steps):
x = x_values[i]
y = y_values[i]
y_mid = y + (h/2) * f(x, y)
x_next = x + h
y_next = y + h * f(x + h/2, y_mid)
x_values.append(x_next)
y_values.append(y_next)
return x_values, y_values
# Setting initial conditions and step size
h = 0.1
x0 = 0
y0 = 1
xn = 1
# Solving using the improved Euler's method
x_values, y_values = improved_euler_method(h, x0, y0, xn)
# Outputting results
for i in range(len(x_values)):
print(f"x = {x_values[i]}, y = {y_values[i]}")
```
**Code Explanation:**
- First, a derivative function f(x, y) is defined to calculate the derivative of the equation.
- Then, the improved Euler's method function improved_euler_method is used to solve the problem, inputting the step size h, initial values x0, y0, and termination value xn.
- In the function, the required number of steps num_steps is first calculated, and then the value of each step is computed through a loop. In each step, the intermediate value y_mid of y is calculated using the improved Euler's method formula, and the next step's value y_next is calculated using this intermediate value. Finally, all step x and y values are stored in x_values and y_values lists and returned as results.
- Lastly, in the main program, the improved Euler's method function is called with the initial conditions and step size, and the results are printed.
**Result Explanation:**
This example calculates the results of the improved Euler's method over the interval [0, 1] with a step size of 0.1. Each line of the output shows the x and y values for a step, and it can be observed that as the steps increase, the y values gradually approach the accurate solution.
# 5. Runge-Kutta Method
Among the methods for numerically solving ordinary differential equations, the Runge-Kutta method is a very commonly used one. It approximates the true solution by converting differential equations into difference equations.
#### Principles of the Runge-Kutta Method
The basic principle of the Runge-Kutta method is to use Taylor series expansions to approximate the solution of differential equations. By employing different weighting coefficients, Runge-Kutta methods of varying orders can be obtained.
#### Algorithm of the Runge-Kutta Method
Here is the algorithm for a commonly used fourth-order Runge-Kutta method:
```python
def runge_kutta(f, h, t0, T, y0):
n = int((T - t0) / h)
t = [t0]
y = [y0]
for i in range(n):
k1 = f(t[i], y[i])
k2 = f(t[i] + h/2, y[i] + h/2 * k1)
k3 = f(t[i] + h/2, y[i] + h/2 * k2)
k4 = f(t[i] + h, y[i] + h * k3)
y_next = y[i] + h/6 * (k1 + 2*k2 + 2*k3 + k4)
y.append(y_next)
t_next = t[i] + h
t.append(t_next)
return t, y
```
#### Higher-order Forms of the Runge-Kutta Method
In addition to the fourth-order Runge-Kutta method, there are higher-order forms such as the fifth and sixth-order Runge-Kutta methods.
Higher-order Runge-Kutta methods can approximate the solutions of differential equations more accurately, but the computational effort will also increase accordingly. Therefore, in practical applications, there must be a trade-off between accuracy and computational efficiency.
This concludes the discussion on the Runge-Kutta method, which is one of the common methods for numerically solving ordinary differential equations. By mastering the Runge-Kutta method, one can more flexibly handle various problems of solving ordinary differential equations and obtain more accurate numerical solutions.
# 6. Other Numerical Solution Methods
In the process of numerically solving ordinary differential equations, apart from the Euler and Runge-Kutta methods, there are other numerical solution methods. These methods can be selected and used based on the needs of actual problems and the characteristics of numerical computation.
### Runge-Kutta Methods
The Runge-Kutta method (a variant of the Runge-Kutta method) ***pared to the Euler method, it offers higher precision and stability. The Runge-Kutta method usually approaches the exact solution through iterative calculations.
Below is a classic example of a fourth-order Runge-Kutta method implemented in Python:
```python
def runge_kutta(f, x0, y0, h, n):
"""
Function for solving ordinary differential equations using the Runge-Kutta method.
:param f: The right-hand side function of the differential equation.
:param x0: Initial value of the independent variable.
:param y0: Initial value of the dependent variable.
:param h: Step size.
:param n: Number of iterations.
:return: The list of results after iteration.
"""
result = [y0]
for i in range(n):
k1 = h * f(x0 + i * h, result[i])
k2 = h * f(x0 + i * h + h/2, result[i] + k1/2)
k3 = h * f(x0 + i * h + h/2, result[i] + k2/2)
k4 = h * f(x0 + i * h + h, result[i] + k3)
y_next = result[i] + (k1 + 2*k2 + 2*k3 + k4) / 6
result.append(y_next)
return result
```
In the code, the `runge_kutta` function takes a function `f` as a parameter, representing the right-hand side function of the differential equation to be solved. Then, through iterative calculation, it computes the values of the dependent variable for each time step one by one. Finally, all the computed results are stored in a list and returned.
### Multistep Methods
Multistep methods are numerical solution methods that rely on historical data to predict the current solution. Multistep methods usually require multiple initial values, so during iterative calculations, it is necessary to compute the values of the dependent variable for each time step in sequence.
Below is a classic example of the Adams-Bashforth predictor-corrector fourth-order method (consisting of two three-order formulas) implemented in Python:
```python
def adams_bashforth_moulton(f, x0, y0, h, n):
"""
Function for solving ordinary differential equations using the Adams-Bashforth predictor-corrector method.
:param f: The right-hand side function of the differential equation.
:param x0: Initial value of the independent variable.
:param y0: Initial value of the dependent variable.
:param h: Step size.
:param n: Number of iterations.
:return: The list of results after iteration.
"""
result = [y0]
for i in range(n):
# Prediction
p1 = f(x0 + i*h, result[i])
p2 = f(x0 + (i-1)*h, result[i-1])
p3 = f(x0 + (i-2)*h, result[i-2])
y_predict = result[i] + h * (55*p1 - 59*p2 + 37*p3 - 9*f(x0 + (i-3)*h, result[i-3])) / 24
# Correction
c1 = f(x0 + (i+1)*h, y_predict)
c2 = f(x0 + i*h, result[i])
c3 = f(x0 + (i-1)*h, result[i-1])
c4 = f(x0 + (i-2)*h, result[i-2])
y_corrected = result[i] + h * (9*c1 + 19*c2 - 5*c3 + c4) / 24
result.append(y_corrected)
return result
```
In the code, the `adams_bashforth_moulton` function uses the predictor-corrector formula of the Adams-Bashforth method, iteratively computing and correcting the values of the dependent variable for each time step one by one.
### Adaptive Step Size Methods
Adaptive step size methods are numerical solution methods that automatically adjust the step size as needed. During the solving process, adaptive step size methods will automatically choose the size of the next time step based on the magnitude of the numerical error, ensuring the accuracy and stability of the numerical solution.
Below is an example of an adaptive step size improved Euler method implemented in Python:
```python
def adaptive_euler(f, x0, y0, h, tol, max_iter):
"""
Function for solving ordinary differential equations using the adaptive step size improved Euler method.
:param f: The right-hand side function of the differential equation.
:param x0: Initial value of the independent variable.
:param y0: Initial value of the dependent variable.
:param h: Initial step size.
:param tol: Target accuracy.
:param max_iter: Maximum number of iterations.
:return: The list of results after iteration.
"""
result = [y0]
x = x0
y = y0
h_actual = h
iter_count = 0
while iter_count < max_iter:
delta1 = h_actual * f(x, y)
delta2 = h_actual * f(x + h_actual, y + delta1)
error = abs(delta2 - delta1)
if error <= tol:
y_next = y + delta2
result.append(y_next)
x += h_actual
y = y_next
iter_count += 1
h_actual = h * (tol / error) ** 0.5
return result
```
In the code, the `adaptive_euler` function automatically adjusts the step size based on error control criteria to ensure the accuracy of the numerical solution. In each iteration, if the error is less than the target accuracy, the result calculated with the current step size is accepted; otherwise, the step size is reduced, and iteration continues.
These are examples of other commonly used numerical solution methods. Depending on the needs of actual problems and the characteristics of numerical computation, suitable numerical solution methods can be selected to solve ordinary differential equations.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python内存管理速成课:5大技巧助你成为内存管理高手
# 摘要
本文系统地探讨了Python语言的内存管理机制,包括内存的分配、自动回收以及内存泄漏的识别与解决方法。首先介绍了Python内存管理的基础知识和分配机制,然后深入分析了内存池、引用计数以及垃圾回收的原理和算法。接着,文章针对高效内存使用策略进行了探讨,涵盖了数据结构优化、减少内存占用的技巧以及内存管理
D700高级应用技巧:挖掘隐藏功能,效率倍增
# 摘要
本文旨在详细介绍Nikon D700相机的基本操作、高级设置、进阶摄影技巧、隐藏功能与创意运用,以及后期处理与工作流优化。从基础的图像质量选择到高级拍摄模式的探索,文章涵盖了相机的全方位使用。特别地,针对图像处理和编辑,本文提供了RAW图像转换和后期编辑的技巧,以及高效的工作流建议。通过对D700的深入探讨,本文旨在帮助摄影爱好者和专业摄影师更好地掌握这款经典相机
DeGroot的统计宇宙:精通概率论与数理统计的不二法门

# 摘要
本文系统地介绍了概率论与数理统计的理论基础及其在现代科学与工程领域中的应用。首先,我们深入探讨了概率论的核心概念,如随机变量的分类、分布特性以及多变量概率分布的基本理论。接着,重点阐述了数理统计的核心方法,包括估计理论、假设检验和回归分析,并讨论了它们在实际问题中的
性能优化秘籍:Vue项目在HBuilderX打包后的性能分析与调优术

# 摘要
随着前端技术的飞速发展,Vue项目性能优化已成为提升用户体验和系统稳定性的关键环节。本文详细探讨了在HBuilderX环境下构建Vue项目的最佳实践,深入分析了性能分析工具与方法,并提出了一系列针对性的优化策略,包括组件与代码优化、资源管理以及打包与部署优化。此外,
MFC socket服务器稳定性关键:专家教你如何实现

# 摘要
本文综合介绍了MFC socket服务器的设计、实现以及稳定性提升策略。首先概述了MFC socket编程基础,包括通信原理、服务器架构设计,以及编程实践。随后,文章重点探讨了提升MFC socket服务器稳定性的具体策略,如错误处理、性能优化和安全性强化。此外,本文还涵
Swat_Cup系统设计智慧:打造可扩展解决方案的关键要素
# 摘要
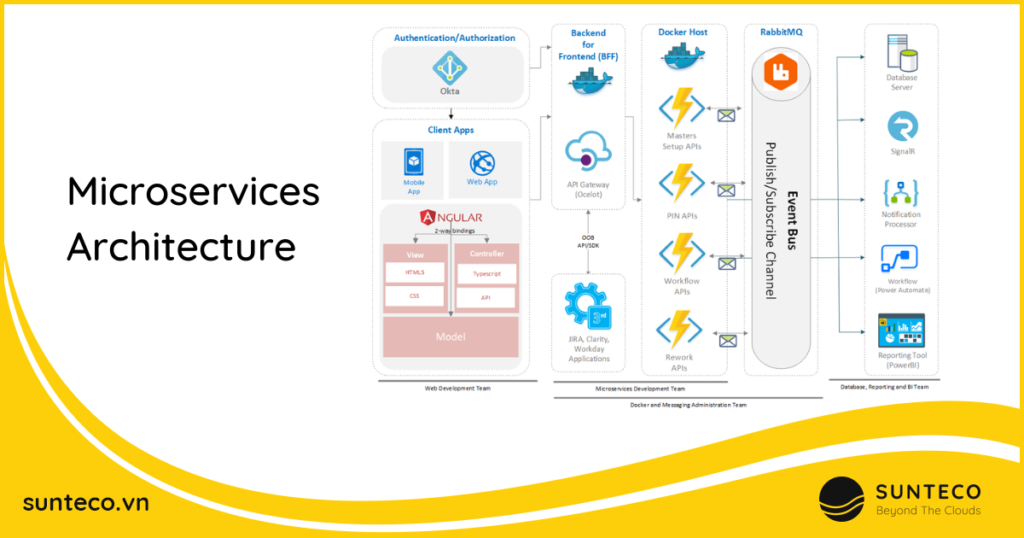
本文综述了Swat_Cup系统的设计、技术实现、安全性设计以及未来展望。首先,概述了系统的整体架构和设计原理,接着深入探讨了可扩展系统设计的理论基础,包括模块化、微服务架构、负载均衡、无状态服务设计等核心要素。技术实现章节着重介绍了容器化技术(如Docker和Kubernetes)
【鼠标消息剖析】:VC++中实现精确光标控制的高级技巧

# 摘要
本论文系统地探讨了鼠标消息的处理机制,分析了鼠标消息的基本概念、分类以及参数解析方法。深入研究了鼠标消息在精确光标控制、高级处理技术以及多线程环境中的应用。探讨了鼠标消息拦截与模拟的实践技巧,以及如何在游戏开发中实现自定义光标系统,优化用户体验。同时,提出了鼠标消息处理过程中的调试与优化策略,包括使用调试工
【车辆网络通信整合术】:CANoe中的Fast Data Exchange(FDX)应用
# 摘要
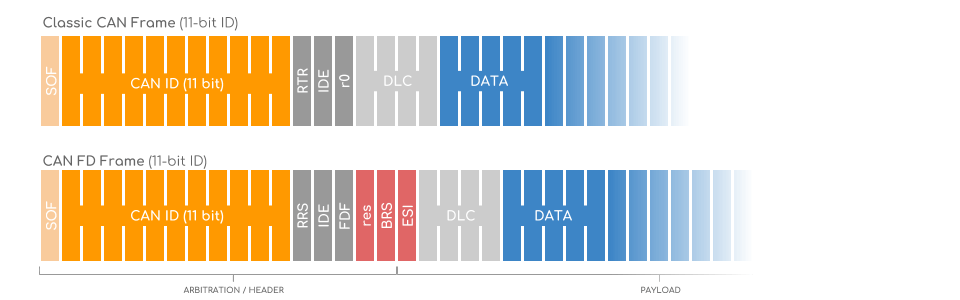
本文主要探讨了CANoe工具与Fast Data Exchange(FDX)技术在车辆网络通信中的整合与应用。第一章介绍了车辆网络通信整合的基本概念。第二章详细阐述了CANoe工具及FDX的功能、工作原理以及配置管理方法。第三章着重分析了FDX在车载数据采集、软件开发及系统诊断中的实
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )