OpenCV手眼标定中的标定误差来源:识别并消除影响因素
发布时间: 2024-08-10 06:54:18 阅读量: 68 订阅数: 23 
# 1. OpenCV手眼标定概述**
手眼标定是一种计算机视觉技术,用于确定相机(“眼睛”)和机器人手臂(“手”)之间的几何关系。它在机器人、自动化和增强现实等领域有着广泛的应用。
OpenCV(开放计算机视觉库)是一个流行的计算机视觉库,提供了各种手眼标定算法和工具。使用OpenCV进行手眼标定可以简化流程并提高精度。
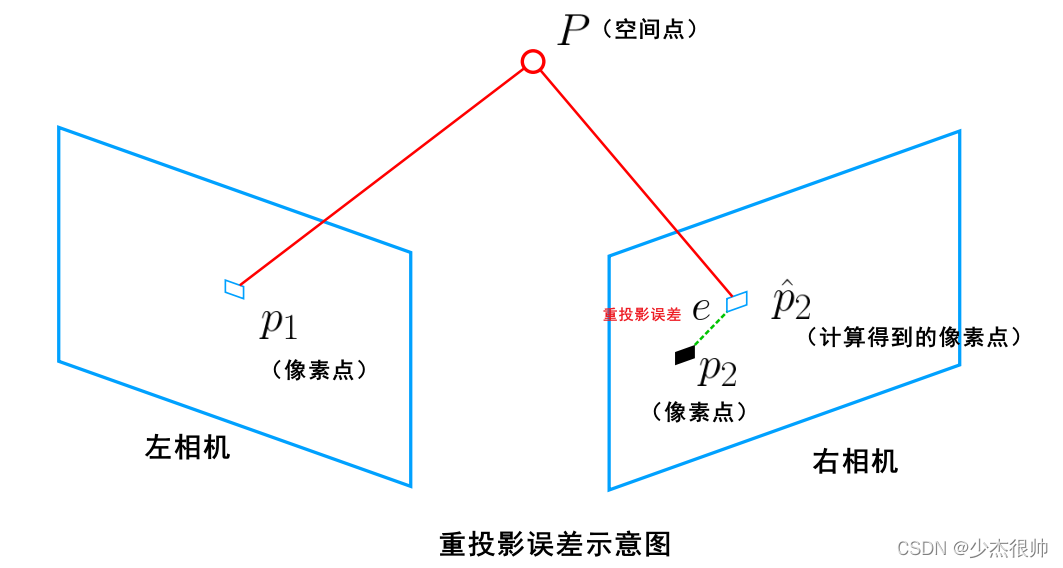
手眼标定的目的是消除相机和机器人手臂之间的误差,从而实现准确的物体定位和操作。误差校正过程涉及识别和消除影响因素,例如相机畸变、外参误差和标定板误差。
# 2. 手眼标定误差来源
手眼标定误差是影响手眼系统精度和可靠性的关键因素。误差可能来自多个来源,包括:
### 2.1 相机内参误差
相机内参误差是指相机本身固有的误差,包括:
#### 2.1.1 透镜畸变
透镜畸变是指由于透镜的非理想形状而导致图像中直线弯曲或扭曲。透镜畸变主要分为两种类型:
- **径向畸变:**图像中远离光轴的点向图像中心移动或远离图像中心。
- **切向畸变:**图像中远离光轴的点沿切线方向移动。
#### 2.1.2 径向畸变
径向畸变可以用以下公式描述:
```python
r_distorted = r_undistorted * (1 + k1 * r_undistorted^2 + k2 * r_undistorted^4 + k3 * r_undistorted^6)
```
其中:
- `r_distorted` 是畸变后的径向距离
- `r_undistorted` 是畸变前的径向距离
- `k1`、`k2`、`k3` 是径向畸变系数
### 2.2 相机外参误差
相机外参误差是指相机相对于标定板的位姿误差,包括:
#### 2.2.1 旋转矩阵误差
旋转矩阵误差是指相机相对于标定板的旋转误差。旋转矩阵误差可以用欧拉角或四元数表示。
#### 2.2.2 平移向量误差
平移向量误差是指相机相对于标定板的平移误差。平移向量误差可以用三个分量表示,分别代表沿 x、y、z 轴的平移量。
### 2.3 标定板误差
标定板误差是指标定板本身的误差,包括:
#### 2.3.1 标定板平面度误差
标定板平面度误差是指标定板的表面不平整,导致标定点的位置不准确。
#### 2.3.2 标定板尺寸误差
标定板尺寸误差是指标定板的实际尺寸与标定值之间的差异。
### 2.4 图像采集误差
图像采集误差是指在图像采集过程中引入的误差,包括:
#### 2.4.1 光照不均匀
光照不均匀会导致图像中不同区域的亮度不同,从而影响特征点的检测和匹配。
#### 2.4.2 运动模糊
运动模糊是指由于相机或标定板的运动而导致图像模糊。运动模糊会降低特征点的清晰度,从而影响匹配精度。
# 3.1 识别相机内参误差
#### 3.1.1 使用标定棋盘格进行相机标定
相机内参误差主要由透镜畸变和径向畸变引起。为了识别这些误差,可以使用标定棋盘格进行相机标定。标定棋盘格是一种带有已知尺寸和图案的平面目标,用于估计相机的内参和畸变系数。
**步骤:**
1. 准备一个标定棋盘格。
2. 将相机对准标定棋盘格,并拍摄一系列图像。
3. 使用OpenCV中的`cv2.calibrateCamera()`函数进行相机标定。
**代码块:**
```python
import cv2
# 准备标定棋盘格
checkerboard_size = (9, 6)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 拍摄标定图像
images = []
for i in range(100):
ret, frame = cap.read()
if ret:
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, checkerboard_size, None)
if ret:
images.append(gray)
# 相机标定
ret, camera_matrix, dist_coeffs,
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**专栏简介:**
本专栏以 OpenCV 手眼标定为主题,深入探讨了相机与机械臂之间的几何关系,以及如何在机器人视觉系统中利用 OpenCV 实现精确的手眼标定。从原理到实践,专栏涵盖了标定板设计、算法剖析、误差分析与校正、标定软件选择、标定过程优化、标定结果评估、标定工具使用、标定技巧与窍门、标定注意事项、标定原理和标定流程等方方面面。通过深入浅出的讲解和丰富的实战案例,专栏旨在帮助读者掌握 OpenCV 手眼标定的核心技术,打造精准可靠的机器人视觉系统,从而提升工业自动化、医疗、无人驾驶和机器人抓取等领域的效率和精度。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
R语言数据包性能监控:实时跟踪使用情况的高效方法
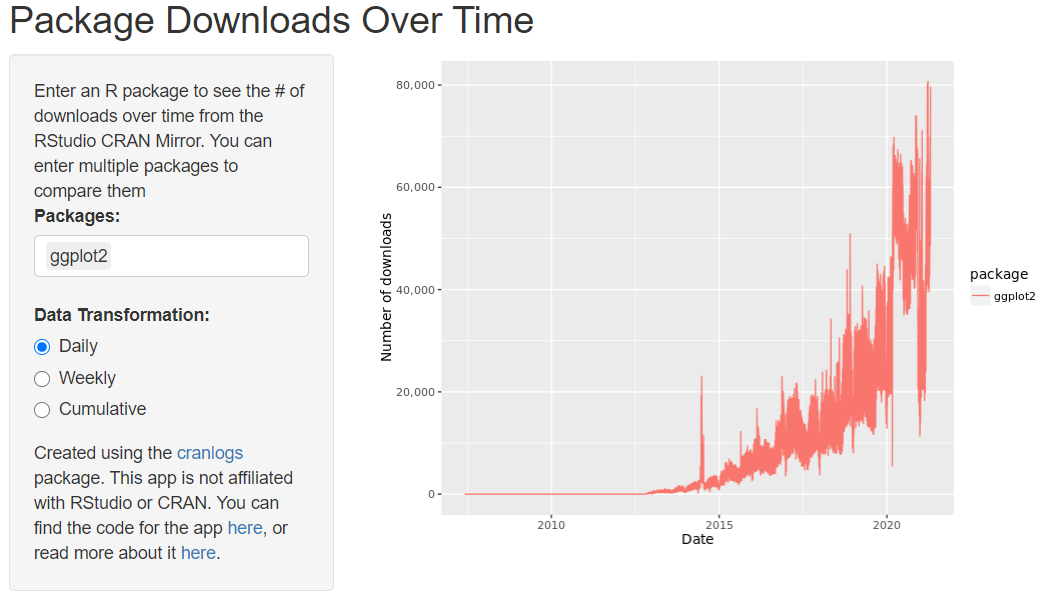
# 1. R语言数据包性能监控概述
在当今数据驱动的时代,对R语言数据包的性能进行监控已经变得越来越重要。本章节旨在为读者提供一个关于R语言性能监控的概述,为后续章节的深入讨论打下基础。
## 1.1 数据包监控的必要性
随着数据科学和统计分析在商业决策中的作用日益增强,R语言作为一款强大的统计分析工具,其性能监控成为确保数据处理效率和准确性的重要环节。性能监控能够帮助我们识别潜在的瓶颈,及时优化数据包的使用效率,提
R语言与SQL数据库交互秘籍:数据查询与分析的高级技巧
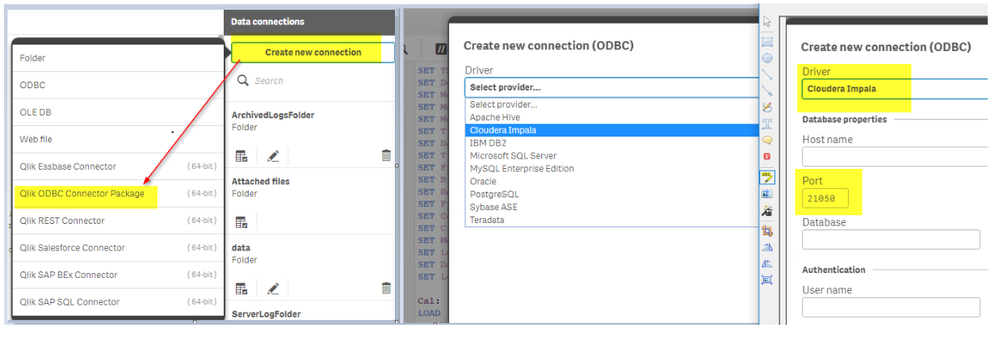
# 1. R语言与SQL数据库交互概述
在数据分析和数据科学领域,R语言与SQL数据库的交互是获取、处理和分析数据的重要环节。R语言擅长于统计分析、图形表示和数据处理,而SQL数据库则擅长存储和快速检索大量结构化数据。本章将概览R语言与SQL数据库交互的基础知识和应用场景,为读者搭建理解后续章节的框架。
## 1.
R语言tm包实战:情感分析高级技巧与深度学习结合

# 1. R语言与tm包基础介绍
## 1.1 R语言简介
R语言作为一种广泛使用的统计编程语言,它在数据分析、数据挖掘和统计建模方面表现卓越。其强大的库集合和灵活的图形能力使其成为研究者和数据分析师的首选工具。
## 1.2 tm包的作用与特点
tm包,全称“
基因表达数据可视化:ggplot2在生物信息学中的应用
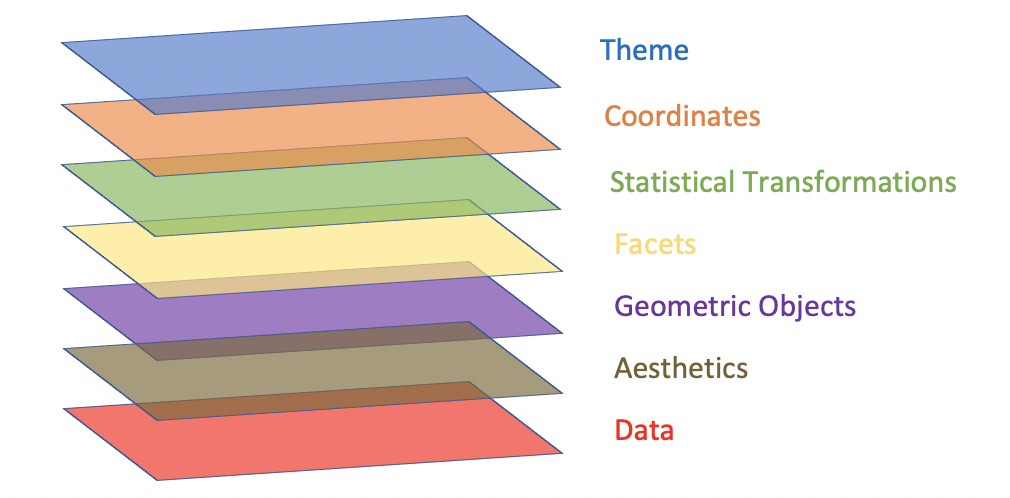
# 1. 基因表达数据可视化概述
在生物信息学研究中,可视化是理解复杂数据的关键。基因表达数据通常包含成千上万个基因的信息,因此,有效地将这些数据可视化能够帮助研究人员快速识别模式、异常值和潜在的生物学意义。本章将介绍基因表达数据可视化的基础概念,包括可视化的重要性、常用工具,以及如何根据研究目的选择合适的可视化方法。我们将探讨数据可视化的几个核心原则,例如选择正确的图形类型、颜色和布局,以及如何通过视觉提示
R语言数据包安全使用指南:规避潜在风险的策略
# 1. R语言数据包基础知识
在R语言的世界里,数据包是构成整个生态系统的基本单元。它们为用户提供了一系列功能强大的工具和函数,用以执行统计分析、数据可视化、机器学习等复杂任务。理解数据包的基础知识是每个数据科学家和分析师的重要起点。本章旨在简明扼要地介绍R语言数据包的核心概念和基础知识,为
【R语言地理信息数据分析】:chinesemisc包的高级应用与技巧
# 1. R语言与地理信息数据分析概述
R语言作为一种功能强大的编程语言和开源软件,非常适合于统计分析、数据挖掘、可视化以及地理信息数据的处理。它集成了众多的统计包和图形工具,为用户提供了一个灵活的工作环境以进行数据分析。地理信息数据分析是一个特定领域
R语言数据包多语言集成指南:与其他编程语言的数据交互(语言桥)

# 1. R语言数据包的基本概念与集成需求
## R语言数据包简介
R语言作为统计分析领域的佼佼者,其数据包(也称作包或库)是其强大功能的核心所在。每个数据包包含特定的函数集合、数据集、编译代码等,专门用于解决特定问题。在进行数据分析工作之前,了解如何选择合适的数据包,并集成到R的
【Tau包社交网络分析】:掌握R语言中的网络数据处理与可视化
# 1. Tau包社交网络分析基础
社交网络分析是研究个体间互动关系的科学领域,而Tau包作为R语言的一个扩展包,专门用于处理和分析网络数据。本章节将介绍Tau包的基本概念、功能和使用场景,为读者提供一个Tau包的入门级了解。
## 1.1 Tau包简介
Tau包提供了丰富的社交网络分析工具,包括网络的创建、分析、可视化等,特别适合用于研究各种复杂网络的结构和动态。它能够处理有向或无向网络,支持图形的导入和导出,使得研究者能够有效地展示和分析网络数据。
## 1.2 Tau与其他网络分析包的比较
Tau包与其他网络分析包(如igraph、network等)相比,具备一些独特的功能和优势。
模型验证的艺术:使用R语言SolveLP包进行模型评估
# 1. 线性规划与模型验证简介
## 1.1 线性规划的定义和重要性
线性规划是一种数学方法,用于在一系列线性不等式约束条件下,找到线性目标函数的最大值或最小值。它在资源分配、生产调度、物流和投资组合优化等众多领域中发挥着关键作用。
```mermaid
flowchart LR
A[问题定义] --> B[建立目标函数]
B --> C[确定约束条件]
C --> D[
【数据挖掘应用案例】:alabama包在挖掘中的关键角色

# 1. 数据挖掘简介与alabama包概述
## 1.1 数据挖掘的定义和重要性
数据挖掘是一个从大量数据中提取或“挖掘”知识的过程。它使用统计、模式识别、机器学习和逻辑编程等技术,以发现数据中的有意义的信息和模式。在当今信息丰富的世界中,数据挖掘已成为各种业务决策的关键支撑技术。有效地挖掘数据可以帮助企业发现未知的关系,预测未来趋势,优化
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )