OpenCV手眼标定中的标定流程:掌握标定步骤与操作要点
发布时间: 2024-08-10 07:15:38 阅读量: 27 订阅数: 24 
# 1. OpenCV手眼标定概述
手眼标定是一种计算机视觉技术,用于确定相机(眼睛)和机械臂(手)之间的相对位置和姿态。它在机器人领域具有广泛的应用,例如抓取、装配和导航。
OpenCV是一个流行的计算机视觉库,提供了一系列手眼标定算法。这些算法基于数学模型,利用相机和机械臂采集的图像数据,计算出两者的相对位置和姿态。手眼标定可以帮助机器人准确地定位和操作物体,提高其自动化程度和效率。
# 2.1 手眼标定模型
手眼标定模型描述了相机和机械臂之间的几何关系,为机器人视觉系统的精确控制和定位提供基础。
### 坐标系定义
手眼标定中涉及三个主要坐标系:
- **世界坐标系(W)**:固定在机器人基座上,用于描述机器人末端执行器在空间中的位置和姿态。
- **相机坐标系(C)**:固定在相机上,用于描述相机在空间中的位置和姿态。
- **工具坐标系(T)**:固定在机械臂末端执行器上,用于描述末端执行器在空间中的位置和姿态。
### 模型参数
手眼标定模型由以下参数描述:
- **平移向量(t)**:从相机坐标系原点到工具坐标系原点的平移向量。
- **旋转矩阵(R)**:从相机坐标系到工具坐标系之间的旋转矩阵。
### 模型建立
手眼标定模型的建立过程涉及以下步骤:
1. **数据采集**:在已知世界坐标系下,采集相机和机械臂在不同姿态下的图像和关节角数据。
2. **图像处理**:从图像中提取特征点,并计算特征点在相机坐标系中的三维坐标。
3. **参数估计**:利用采集的数据,估计模型参数t和R。
### 模型应用
手眼标定模型在机器人视觉系统中具有广泛的应用,包括:
- **机器人抓取**:通过计算末端执行器相对于目标物体的位姿,实现精确抓取。
- **机器人装配**:通过计算部件相对于装配基准的位姿,实现精确装配。
- **机器人导航**:通过计算相机相对于环境的位姿,实现机器人自主导航。
# 3.1 数据采集与准备
**数据采集**
数据采集是手眼标定实践中的关键步骤,其质量直接影响标定结果的准确性。数据采集过程主要包括:
1. **图像采集:**使用相机采集标定板在不同姿态下的图像。
2. **相机位姿测量:**使用机器人或其他定位设备测量相机在采集图像时的位姿。
**图像采集要求**
* 标定板应清晰可见,无遮挡或变形。
* 图像分辨率应足够高,以确保标定板上的特征点清晰可辨。
* 采集图像的数量应满足标定算法的要求,一般不少于 20 张。
**相机位姿测量要求**
* 相机位姿测量精度应高,误差应小于 1mm。
* 相机位姿测量设备应稳定可靠,避免因振动或其他因素导致测量误差。
**数据准备**
数据采集完成后,需要对数据进行预处理,包括:
* **图像预处理:**对图像进行去噪、增强等处理,提高特征点提取的精度。
* **特征点提取:**从图像中提取标定板上的特征点,如棋盘格角点或圆形标记。
* **数据配准:**将相机位姿测量数据与图像特征点数据配准,建立图像和相机位姿之间的对应关系。
### 3.2 标定板设计与制作
**标定板设计**
标定板是手眼标定中用于确定相机和机器人位姿关系的参考物体。标定板的设计应满足以下要求:
* **平面性:**标定板应为平面,以确保特征点在同一平面上。
* **特征点分布:**特征点应均匀分布在标定板上,以提供足够的几何约束。
* **特征点尺寸:**特征点尺寸应足够大,以确保在图像中清晰可辨。
**标定板制作**
标定板可使用以下材料制作:
* **棋盘格:**打印棋盘格图案,贴在平面板上。
* **圆形标记:**使用圆形贴纸或其他材料制作圆形标记,粘贴在平面板上。
* **激光雕刻:**在金属或塑料板上激光雕刻特征点。
### 3.3 标定参数设置
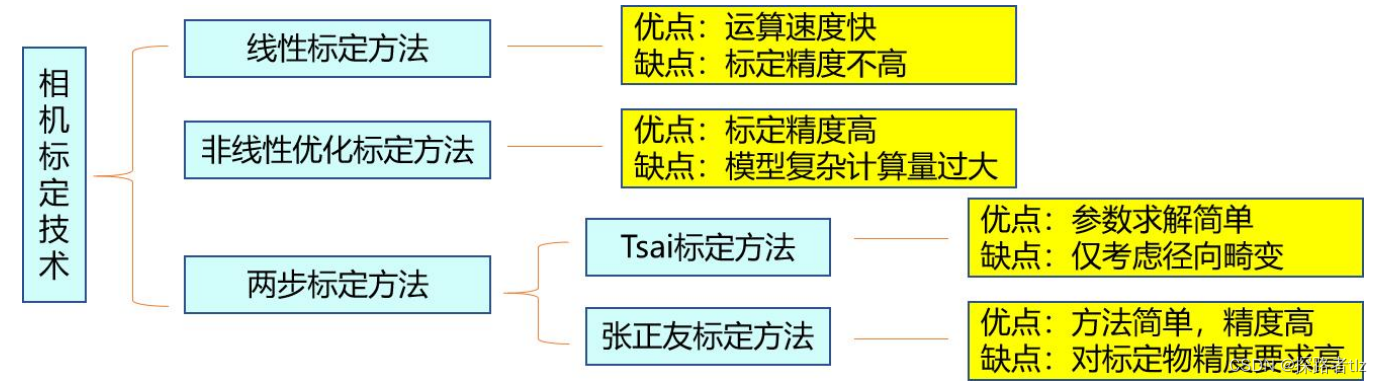
**标定算法选择**
手眼标定算法有多种,常用的算法包括:
* **张氏标定法:**基于摄像机模型和标定板的几何关系进行标定。
* **DLT 标定法:**直接线性变换法,通过最小二乘法求解相机位姿和标定板位姿之间的关系。
**标定参数设置**
标定算法需要设置一些参数,包括:
* **特征点数量:**标定板上的特征点数量。
* **图像分辨率:**图像的宽度和高度。
* **相机内参:**相机的焦距、畸变系数等参数。
* **优化算法:**用于优化标定结果的算法,如 Levenberg-Marquardt 算法。
# 4.1 标定板放置与姿态调整
标定板的放置和姿态调整是手眼标定中至关重要的一步,直接影响标定结果的精度和可靠性。以下介绍标定板放置和姿态调整的要点:
**标定板放置位置**
* 标定板应放置在相机和机械臂的工作空间内,确保相机和机械臂都能清晰地观测到标定板。
* 标定
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**专栏简介:**
本专栏以 OpenCV 手眼标定为主题,深入探讨了相机与机械臂之间的几何关系,以及如何在机器人视觉系统中利用 OpenCV 实现精确的手眼标定。从原理到实践,专栏涵盖了标定板设计、算法剖析、误差分析与校正、标定软件选择、标定过程优化、标定结果评估、标定工具使用、标定技巧与窍门、标定注意事项、标定原理和标定流程等方方面面。通过深入浅出的讲解和丰富的实战案例,专栏旨在帮助读者掌握 OpenCV 手眼标定的核心技术,打造精准可靠的机器人视觉系统,从而提升工业自动化、医疗、无人驾驶和机器人抓取等领域的效率和精度。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
C Language Image Pixel Data Loading and Analysis [File Format Support] Supports multiple file formats including JPEG, BMP, etc.
# 1. Introduction
The Importance of Image Processing in Computer Vision and Image Analysis
This article focuses on how to read and analyze image pixel data using C language.
# ***
***mon formats include JPEG, BMP, etc. Each has unique features and storage structures. A brief overview is provided
EasyExcel Dynamic Columns [Performance Optimization] - Saving Memory and Preventing Memory Overflow Issues
# 1. Understanding the Background of EasyExcel Dynamic Columns
- 1.1 Introduction to EasyExcel
- 1.2 Concept and Application Scenarios of Dynamic Columns
- 1.3 Performance and Memory Challenges Brought by Dynamic Columns
# 2. Fundamental Principles of Performance Optimization
When dealing with la
Setting up a Cluster Environment with VirtualBox: High Availability Applications
# 1. High Availability Applications
## 1. Introduction
Constructing highly available applications is a crucial component in modern cloud computing environments. By building a cluster environment, it is possible to achieve high availability and load balancing for applications, enhancing system stab
PyCharm Python Code Review: Enhancing Code Quality and Building a Robust Codebase
# 1. Overview of PyCharm Python Code Review
PyCharm is a powerful Python IDE that offers comprehensive code review tools and features to assist developers in enhancing code quality and facilitating team collaboration. Code review is a critical step in the software development process that involves
【Practical Sensitivity Analysis】: The Practice and Significance of Sensitivity Analysis in Linear Regression Models
# Practical Sensitivity Analysis: Sensitivity Analysis in Linear Regression Models and Its Significance
## 1. Overview of Linear Regression Models
A linear regression model is a common regression analysis method that establishes a linear relationship between independent variables and dependent var
Application of MATLAB Gaussian Fitting in Signal Processing: Extracting Useful Information from Noise to Enhance Signal Clarity
# Application of MATLAB Gaussian Fitting in Signal Processing: Extracting Useful Information from Noise and Enhancing Signal Clarity
 is an open-source library of algorithms and functions for image processing, computer vision, and machine learning tasks. It is closely integrated with the Python programming language, enabling developers to eas
Navicat Connection to MySQL Database: Best Practices Guide for Enhancing Database Connection Efficiency
# 1. Best Practices for Connecting to MySQL Database with Navicat
Navicat is a powerful database management tool that enables you to connect to and manage MySQL databases. To ensure the best connection experience, it's crucial to follow some best practices.
First, optimize connection parameters, i
浏览器存储技术新境界:用Web Storage和IndexedDB高效删除数据

# 1. 浏览器存储技术概述
在现代的Web应用中,浏览器存储技术扮演了一个至关重要的角色。它让Web应用能够保存数据到用户的本地设备上,为用户提供更加个性化和离线使用的体验。浏览器存储技术包括了Web Storage和IndexedDB,它们各有特点,满足不同场景下的存储需求。
## 1.1 浏览器存储技术的发展与分类
浏览器存储技术随着Web技
【遍历算法的可视化】:动态树结构遍历演示,一看即懂
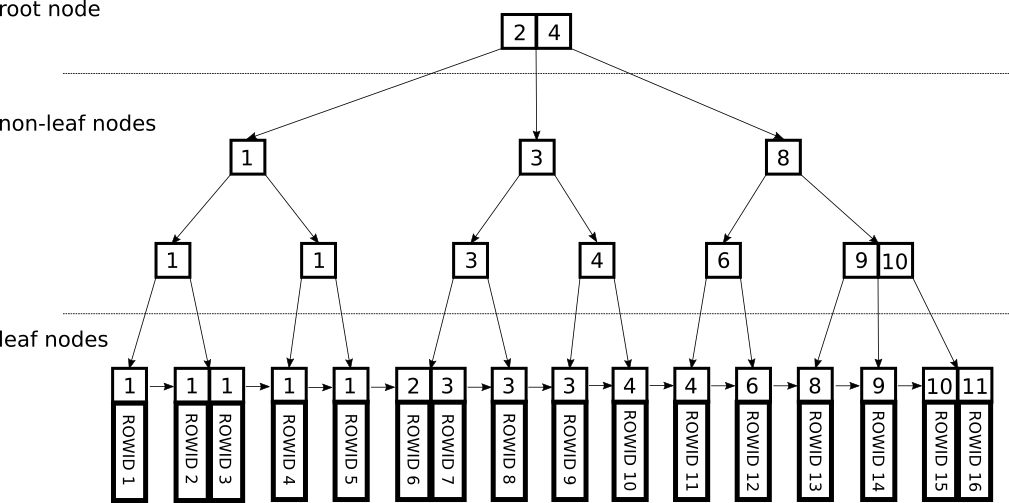
# 1. 遍历算法与树结构基础
在计算机科学和信息技术领域,树结构是描述具有层次关系的数据模型的重要概念。作为基本数据结构之一,树在数据库、文件系统、网络结构和多种算法设计中扮演着关键角色。本章将简要介绍遍历算法与树结构的基本知识,为后续章节的深入探讨打下坚实的基础。
## 1.1 树的基本概念
### 1.1.1 树的定义和术语
在计算机科学中,树是一种非线性的数据结构,它通过节点间的父子关系来模拟一种层次结构。树的定义可以
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )