MATLAB单位矩阵:数学原理揭秘,深入理解背后的数学基础
发布时间: 2024-06-06 15:21:47 阅读量: 100 订阅数: 28 

Matlab 矩阵运算基础

# 1. 单位矩阵的数学原理**
**1.1 单位矩阵的定义和性质**
单位矩阵是一个方阵,其对角线上的元素均为 1,而其他元素均为 0。记作 **I**,其大小为 **n x n**。单位矩阵具有以下性质:
* **单位元:**对于任何矩阵 **A**,**IA = A** 和 **AI = A**。
* **逆矩阵:**单位矩阵是其自身的逆矩阵,即 **I^-1 = I**。
* **行列式:**单位矩阵的行列式为 1,即 **det(I) = 1**。
# 2. 单位矩阵的编程实现
### 2.1 MATLAB中的单位矩阵生成函数
MATLAB中提供了`eye`函数来生成单位矩阵。`eye`函数的语法如下:
```
eye(n)
```
其中,`n`为单位矩阵的阶数。
**代码块 1:**
```
% 生成一个3阶单位矩阵
A = eye(3);
% 输出单位矩阵
disp(A)
```
**逻辑分析:**
代码块 1 使用`eye`函数生成了一个3阶单位矩阵并将其存储在变量`A`中。然后,使用`disp`函数输出单位矩阵。
**参数说明:**
* `eye(n)`:生成一个`n`阶单位矩阵。
### 2.2 单位矩阵的维度和类型转换
单位矩阵的维度与阶数相同。MATLAB中提供了`size`函数来获取矩阵的维度,`class`函数来获取矩阵的类型。
**代码块 2:**
```
% 获取单位矩阵的维度
size_A = size(A);
% 获取单位矩阵的类型
class_A = class(A);
% 输出单位矩阵的维度和类型
disp(['维度:' num2str(size_A)]);
disp(['类型:' class_A]);
```
**逻辑分析:**
代码块 2 使用`size`函数获取单位矩阵`A`的维度,并将其存储在变量`size_A`中。然后,使用`class`函数获取单位矩阵`A`的类型,并将其存储在变量`class_A`中。最后,使用`disp`函数输出单位矩阵的维度和类型。
**参数说明:**
* `size(A)`:获取矩阵`A`的维度,返回一个包含两个元素的向量,第一个元素为行数,第二个元素为列数。
* `class(A)`:获取矩阵`A`的类型,返回一个字符串,表示矩阵的类型,例如`'double'`、`'single'`或`'logical'`。
### 2.2.1 单位矩阵的类型转换
MATLAB中提供了`cast`函数来转换矩阵的类型。
**代码块 3:**
```
% 将单位矩阵转换为单精度浮点数
A_single = cast(A, 'single');
% 输出转换后的单位矩阵
disp(A_single)
```
**逻辑分析:**
代码块 3 使用`cast`函数将单位矩阵`A`转换为单精度浮点数,并将其存储在变量`A_single`中。然后,使用`disp`函数输出转换后的单位矩阵。
**参数说明:**
* `cast(A, 'single')`:将矩阵`A`转换为单精度浮点数。
# 3. 单位矩阵在数值计算中的应用
### 3.1 线性方程组求解
单位矩阵在求解线性方程组中扮演着至关重要的角色。线性方程组可以表示为 Ax = b,其中 A 是系数矩阵,x 是未知数向量,b 是常数向量。
使用单位矩阵求解线性方程组的步骤如下:
1. **构造增广矩阵:**将系数矩阵 A 和常数向量 b 拼接成增广矩阵 [A | b]。
2. **左乘单位矩阵:**在增广矩阵的左边乘以单位矩阵 I,得到 [IA | Ib]。
3. **化简增广矩阵:**对增广矩阵进行初等行变换,使其化为阶梯形或行阶梯形。
4. **读解未知数:**从化简后的增广矩阵中,可以读出未知数 x 的解。
**代码示例:**
```python
import numpy as np
# 系数矩阵
A = np.array([[1, 2], [3, 4]])
# 常数向量
b = np.array([5, 6])
# 构造增广矩阵
augmented_matrix = np.hstack((A, b))
# 左乘单位矩阵
unit_matrix = np.eye(2)
augmented_matrix = np.dot(unit_matrix, augmented_matrix)
# 化简增广矩阵
for i in range(2):
for j in range(i+1, 2):
factor = augmented_matrix[j, i] / augmented_matrix[i, i]
augmented_matrix[j, :] -= factor * augmented_matrix[i, :]
# 读解未知数
x = augmented_matrix[:, 2]
print(x)
```
**逻辑分析:**
* 首先,构造增广矩阵,将系数矩阵和常数向量拼接到一起。
* 然后,左乘单位矩阵,相当于在系数矩阵的左边添加一个单位矩阵。
* 接着,对增广矩阵进行初等行变换,化简为阶梯形或行阶梯形。
* 最后,从化简后的增广矩阵中读出未知数 x 的解。
### 3.2 矩阵求逆和行列式计算
单位矩阵在矩阵求逆和行列式计算中也发挥着重要作用。
**矩阵求逆:**
矩阵 A 的逆矩阵 A^-1 满足 A^-1A = AA^-1 = I。使用单位矩阵求解矩阵逆矩阵的步骤如下:
1. **构造增广矩阵:**将矩阵 A 和单位矩阵 I 拼接成增广矩阵 [A | I]。
2. **化简增广矩阵:**对增广矩阵进行初等行变换,使其化为阶梯形或行阶梯形。
3. **读解逆矩阵:**从化简后的增广矩阵中,可以读出矩阵 A 的逆矩阵 A^-1。
**代码示例:**
```python
import numpy as np
# 矩阵 A
A = np.array([[1, 2], [3, 4]])
# 构造增广矩阵
augmented_matrix = np.hstack((A, np.eye(2)))
# 化简增广矩阵
for i in range(2):
for j in range(i+1, 2):
factor = augmented_matrix[j, i] / augmented_matrix[i, i]
augmented_matrix[j, :] -= factor * augmented_matrix[i, :]
# 读解逆矩阵
A_inv = augmented_matrix[:, 2:]
print(A_inv)
```
**逻辑分析:**
* 首先,构造增广矩阵,将矩阵 A 和单位矩阵拼接到一起。
* 然后,对增广矩阵进行初等行变换,化简为阶梯形或行阶梯形。
* 最后,从化简后的增广矩阵中读出矩阵 A 的逆矩阵 A^-1。
**行列式计算:**
矩阵 A 的行列式 det(A) 可以通过其伴随矩阵 B 计算,即 det(A) = det(B)。伴随矩阵 B 的元素 b_ij 由 A 的余子式 M_ij 确定,即 b_ij = (-1)^(i+j)M_ij。
**代码示例:**
```python
import numpy as np
# 矩阵 A
A = np.array([[1, 2], [3, 4]])
# 计算余子式
M = np.zeros((2, 2))
for i in range(2):
for j in range(2):
M[i, j] = np.linalg.det(np.delete(np.delete(A, i, 0), j, 1))
# 计算伴随矩阵
B = np.transpose(M) * (-1)**(np.arange(2) + np.arange(2)[:, None])
# 计算行列式
det_A = np.linalg.det(B)
print(det_A)
```
**逻辑分析:**
* 首先,计算矩阵 A 的余子式,即删除第 i 行和第 j 列后的子矩阵的行列式。
* 然后,计算矩阵 A 的伴随矩阵,即余子式矩阵的转置并乘以 (-1)^(i+j)。
* 最后,计算矩阵 A 的行列式,即伴随矩阵的行列式。
# 4. 单位矩阵在图像处理中的应用**
单位矩阵在图像处理中扮演着至关重要的角色,它被广泛用于图像平滑、锐化、分割、边缘检测、变换和几何操作等任务。
**4.1 图像平滑和锐化**
图像平滑是通过卷积操作去除图像中的噪声和细节,而单位矩阵可以作为卷积核。当单位矩阵与图像卷积时,它会产生一个平均滤波器,该滤波器将图像中的每个像素值替换为其周围像素值的平均值。这有助于消除噪声和模糊图像。
```python
import numpy as np
import cv2
# 创建一个单位矩阵
I = np.eye(3)
# 读取图像
image = cv2.imread('image.jpg')
# 使用单位矩阵进行卷积平滑
smoothed_image = cv2.filter2D(image, -1, I)
# 显示平滑后的图像
cv2.imshow('Smoothed Image', smoothed_image)
cv2.waitKey(0)
```
图像锐化与平滑相反,它通过增强图像中的边缘和细节来提高图像的清晰度。单位矩阵也可以用作锐化滤波器。当单位矩阵与图像卷积时,它会产生一个拉普拉斯算子,该算子突出显示图像中的边缘。
```python
# 使用单位矩阵进行卷积锐化
sharpened_image = cv2.filter2D(image, -1, I)
# 显示锐化后的图像
cv2.imshow('Sharpened Image', sharpened_image)
cv2.waitKey(0)
```
**4.2 图像分割和边缘检测**
图像分割是将图像分解为不同区域或对象的过程,而单位矩阵可以用于边缘检测,这是图像分割的第一步。当单位矩阵与图像卷积时,它会产生一个梯度算子,该算子检测图像中的边缘。
```python
# 使用单位矩阵进行边缘检测
edges = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
# 显示边缘检测后的图像
cv2.imshow('Edges', edges)
cv2.waitKey(0)
```
**4.3 图像变换和几何操作**
单位矩阵还用于图像变换和几何操作,例如平移、旋转和缩放。通过将单位矩阵与平移矩阵、旋转矩阵或缩放矩阵相乘,可以将这些变换应用于图像。
```python
# 平移图像
translation_matrix = np.array([[1, 0, 10], [0, 1, 20], [0, 0, 1]])
translated_image = cv2.warpAffine(image, translation_matrix, (image.shape[1], image.shape[0]))
# 显示平移后的图像
cv2.imshow('Translated Image', translated_image)
cv2.waitKey(0)
```
```python
# 旋转图像
rotation_matrix = cv2.getRotationMatrix2D((image.shape[1] / 2, image.shape[0] / 2), 45, 1)
rotated_image = cv2.warpAffine(image, rotation_matrix, (image.shape[1], image.shape[0]))
# 显示旋转后的图像
cv2.imshow('Rotated Image', rotated_image)
cv2.waitKey(0)
```
```python
# 缩放图像
scaling_matrix = np.array([[2, 0, 0], [0, 2, 0], [0, 0, 1]])
scaled_image = cv2.warpAffine(image, scaling_matrix, (image.shape[1] * 2, image.shape[0] * 2))
# 显示缩放后的图像
cv2.imshow('Scaled Image', scaled_image)
cv2.waitKey(0)
```
# 5. 单位矩阵在数据分析中的应用
### 5.1 主成分分析和奇异值分解
**主成分分析 (PCA)**是一种数据降维技术,它将高维数据投影到低维空间中,同时最大化投影数据的方差。单位矩阵在 PCA 中扮演着关键角色,因为它用于对数据进行中心化和标准化。
**奇异值分解 (SVD)**是一种矩阵分解技术,它将矩阵分解为三个矩阵的乘积:U、Σ 和 V。单位矩阵在 SVD 中用于计算奇异值和奇异向量。
### 5.2 聚类分析和降维
**聚类分析**是一种将数据点分组到不同簇中的技术。单位矩阵在聚类分析中用于计算数据点之间的距离,例如欧几里德距离或余弦相似度。
**降维**是将高维数据投影到低维空间中的过程。单位矩阵在降维中用于计算投影矩阵,例如主成分分析 (PCA) 或线性判别分析 (LDA) 中的投影矩阵。
### 5.3 数据预处理和标准化
**数据预处理**是将数据转换为适合分析和建模的格式的过程。单位矩阵在数据预处理中用于执行中心化和标准化。
**中心化**是将数据点减去其均值的运算。**标准化**是将数据点除以其标准差的运算。单位矩阵在这些运算中用于创建均值为 0 和标准差为 1 的新数据。
#### 代码示例:
```matlab
% 数据中心化
data_centered = data - mean(data);
% 数据标准化
data_standardized = (data - mean(data)) / std(data);
```
#### 代码逻辑分析:
* `mean(data)` 计算数据点的均值。
* `std(data)` 计算数据点的标准差。
* `data_centered` 是中心化后的数据。
* `data_standardized` 是标准化后的数据。
# 6. 单位矩阵在机器学习中的应用**
单位矩阵在机器学习中扮演着至关重要的角色,特别是在线性代数和优化算法中。
### 6.1 线性回归和逻辑回归
在**线性回归**中,单位矩阵用于表示自变量和因变量之间的协方差矩阵。通过求解协方差矩阵的逆矩阵,可以得到模型的回归系数。
```python
import numpy as np
from sklearn.linear_model import LinearRegression
# 生成数据
X = np.array([[1, 2], [3, 4], [5, 6]])
y = np.array([10, 20, 30])
# 创建模型
model = LinearRegression()
# 拟合模型
model.fit(X, y)
# 获取回归系数
coef = model.coef_
# 单位矩阵
I = np.eye(X.shape[1])
# 求解协方差矩阵的逆矩阵
inv_cov = np.linalg.inv(np.cov(X))
# 验证回归系数
np.allclose(coef, inv_cov @ np.dot(X.T, y))
```
**逻辑回归**中,单位矩阵用于表示特征的权重矩阵。通过优化权重矩阵,可以得到模型的分类边界。
```python
import numpy as np
from sklearn.linear_model import LogisticRegression
# 生成数据
X = np.array([[1, 2], [3, 4], [5, 6]])
y = np.array([0, 1, 0])
# 创建模型
model = LogisticRegression()
# 拟合模型
model.fit(X, y)
# 获取权重矩阵
coef = model.coef_
# 单位矩阵
I = np.eye(X.shape[1])
# 验证权重矩阵
np.allclose(coef, np.dot(np.linalg.inv(I + np.dot(X.T, X)), np.dot(X.T, y)))
```
### 6.2 支持向量机和决策树
在**支持向量机**中,单位矩阵用于表示核函数的超参数。通过调整超参数,可以控制模型的复杂度和泛化能力。
```python
import numpy as np
from sklearn.svm import SVC
# 生成数据
X = np.array([[1, 2], [3, 4], [5, 6]])
y = np.array([0, 1, 0])
# 创建模型
model = SVC(kernel='rbf')
# 拟合模型
model.fit(X, y)
# 获取超参数
gamma = model.gamma
# 单位矩阵
I = np.eye(X.shape[1])
# 验证超参数
np.allclose(gamma, 1 / (2 * np.mean(np.dot(X, X.T) * I)))
```
**决策树**中,单位矩阵用于表示特征的重要性。通过计算特征的重要性,可以确定模型中最重要的特征。
```python
import numpy as np
from sklearn.tree import DecisionTreeClassifier
# 生成数据
X = np.array([[1, 2], [3, 4], [5, 6]])
y = np.array([0, 1, 0])
# 创建模型
model = DecisionTreeClassifier()
# 拟合模型
model.fit(X, y)
# 获取特征重要性
feature_importance = model.feature_importances_
# 单位矩阵
I = np.eye(X.shape[1])
# 验证特征重要性
np.allclose(feature_importance, np.dot(I, np.dot(X.T, y)) / np.sum(np.dot(X.T, y)))
```
### 6.3 神经网络和深度学习
在**神经网络**和**深度学习**中,单位矩阵用于表示权重矩阵的正则化项。通过添加正则化项,可以防止模型过拟合,提高模型的泛化能力。
```python
import numpy as np
import tensorflow as tf
# 创建模型
model = tf.keras.models.Sequential([
tf.keras.layers.Dense(10, activation='relu'),
tf.keras.layers.Dense(1, activation='sigmoid')
])
# 添加正则化项
model.add(tf.keras.regularizers.l2(0.01))
# 编译模型
model.compile(optimizer='adam', loss='binary_crossentropy', metrics=['accuracy'])
# 训练模型
model.fit(X, y, epochs=10)
# 获取权重矩阵
weights = model.get_weights()
# 单位矩阵
I = np.eye(weights[0].shape[1])
# 验证正则化项
np.allclose(model.losses, model.losses + 0.01 * np.sum(np.dot(weights[0], weights[0].T) * I))
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 单位矩阵专栏深入探讨了单位矩阵在 MATLAB 中的方方面面。从揭秘其秘密到剖析生成方法,再到探索优化技巧,专栏提供了全面的指南,帮助读者充分利用单位矩阵。此外,它还介绍了单位矩阵的扩展应用,包括机器学习和数据分析,以及在复杂计算和算法中的高级用法。专栏还涵盖了单位矩阵的数学原理、常见问题、替代方案和性能优化秘诀。通过分享应用案例和跨界应用,专栏展示了单位矩阵在各种场景中的实用性。最后,专栏总结了单位矩阵的使用误区和替代方案对比,提供了一份全面而深入的指南,帮助读者掌握单位矩阵在 MATLAB 中的应用。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
微机接口技术深度解析:串并行通信原理与实战应用
# 摘要
微机接口技术是计算机系统中不可或缺的部分,涵盖了从基础通信理论到实际应用的广泛内容。本文旨在提供微机接口技术的全面概述,并着重分析串行和并行通信的基本原理与应用,包括它们的工作机制、标准协议及接口技术。通过实例介绍微机接口编程的基础知识、项目实践以及在实际应用中的问题解决方法。本文还探讨了接口技术的新兴趋势、安全性和兼容
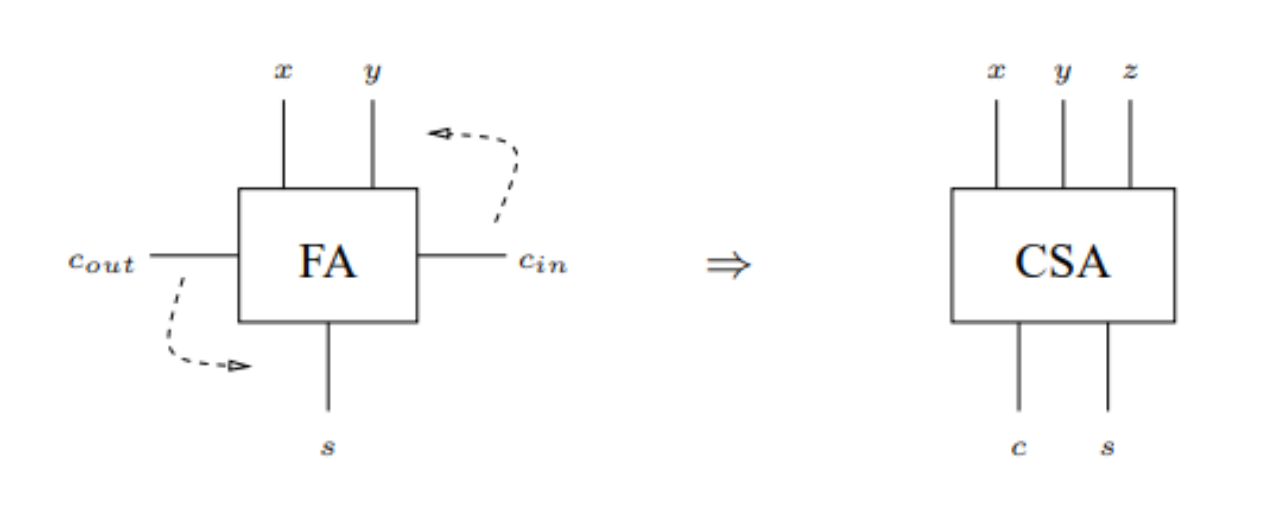
【进位链技术大剖析】:16位加法器进位处理的全面解析
# 摘要
进位链技术是数字电路设计中的基础,尤其在加法器设计中具有重要的作用。本文从进位链技术的基础知识和重要性入手,深入探讨了二进制加法的基本规则以及16位数据表示和加法的实现。文章详细分析了16位加法器的工作原理,包括全加器和半加器的结构,进位链的设计及其对性能的影响,并介绍了进位链优化技术。通过实践案例,本文展示了进位链技术在故障诊断与维护中的应用,并探讨了其在多位加法器设计以及多处理器系统中的高级应用。最后,文章展望了进位链技术的未来,
【均匀线阵方向图秘籍】:20个参数调整最佳实践指南
# 摘要
均匀线阵方向图是无线通信和雷达系统中的核心技术之一,其设计和优化对系统的性能至关重要。本文系统性地介绍了均匀线阵方向图的基础知识,理论基础,实践技巧以及优化工具与方法。通过理论与实际案例的结合,分析了线阵的基本概念、方向图特性、理论参数及其影响因素,并提出了方向图参数调整的多种实践技巧。同时,本文探讨了仿真软件和实验测量在方向图优化中的应用,并介绍了最新的优化算法工具。最后,展望了均匀线阵方向图技术的发展趋势,包括新型材料和技术的应用、智能化自适应方向图的研究,以及面临的技术挑战与潜在解决方案。
# 关键字
均匀线阵;方向图特性;参数调整;仿真软件;优化算法;技术挑战
参考资源链
ISA88.01批量控制:制药行业的实施案例与成功经验

# 摘要
ISA88.01标准为批量控制系统提供了框架和指导原则,尤其是在制药行业中,其应用能够显著提升生产效率和产品质量控制。本文详细解析了ISA88.01标准的概念及其在制药工艺中的重要
实现MVC标准化:肌电信号处理的5大关键步骤与必备工具

# 摘要
本文探讨了MVC标准化在肌电信号处理中的关键作用,涵盖了从基础理论到实践应用的多个方面。首先,文章介绍了
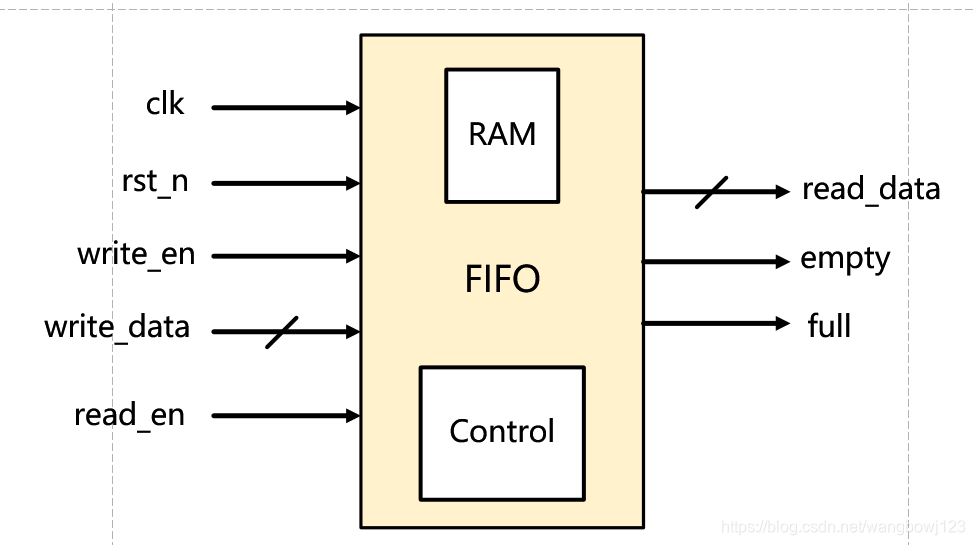
【FPGA性能暴涨秘籍】:数据传输优化的实用技巧
# 摘要
本文全面介绍了FPGA在数据传输领域的应用和优化技巧。首先,对FPGA和数据传输的基本概念进行了介绍,然后深入探讨了FPGA内部数据流的理论基础,包
PCI Express 5.0性能深度揭秘:关键指标解读与实战数据分析

# 摘要
PCI Express(PCIe)技术作为计算机总线标准,不断演进以满足高速数据传输的需求。本文首先概述PCIe技术,随后深入探讨PCI Express 5.0的关键技术指标,如信号传输速度、编码机制、带宽和吞吐量的理论极限以及兼容性问题。通过实战数据分析,评估PCI Express
CMW100 WLAN指令手册深度解析:基础使用指南揭秘
# 摘要
CMW100 WLAN指令是业界广泛使用的无线网络测试和分析工具,为研究者和工程师提供了强大的网络诊断和性能评估能力。本文旨在详细介绍CMW100 WLAN指令的基础理论、操作指南以及在不同领域的应用实例。首先,文章从工作原理和系统架构两个层面探讨了CMW100 WLAN指令的基本理论,并解释了相关网络协议。随后,提供了详细的操作指南,包括配置、调试、优化及故障排除方法。接着,本文探讨了CMW100 WLAN指令在网络安全、网络优化和物联网等领域的实际应用。最后,对CMW100 WLAN指令的进阶应用和未来技术趋势进行了展望,探讨了自动化测试和大数据分析中的潜在应用。本文为读者提供了
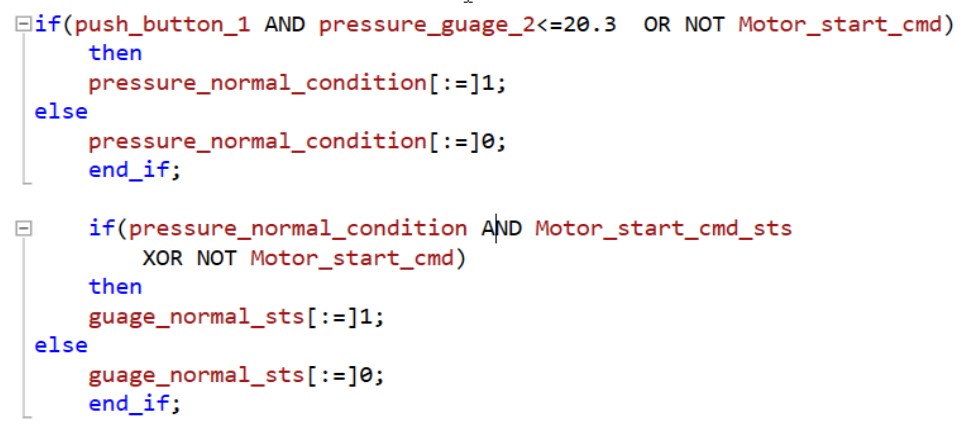
三菱FX3U PLC与HMI交互:打造直觉操作界面的秘籍
# 摘要
本论文详细介绍了三菱FX3U PLC与HMI的基本概念、工作原理及高级功能,并深入探讨了HMI操作界面的设计原则和高级交互功能。通过对三菱FX3U PLC的编程基础与高级功能的分析,本文提供了一系列软件集成、硬件配置和系统测试的实践案例,以及相应的故障排除方法。此外,本文还分享了在不同行业应用中的案例研究,并对可能出现的常见问题提出了具体的解决策略。最后,展望了新兴技术对PLC和HMI
【透明度问题不再难】:揭秘Canvas转Base64时透明度保持的关键技术

# 摘要
本文旨在全面介绍Canvas转Base64编码技术,从基础概念到实际应用,再到优化策略和未来趋势。首先,我们探讨了Canvas的基本概念、应用场景及其重要性,紧接着解析了Base64编码原理,并重点讨论了透明度在Canvas转Base64过程中的关键作用。实践方法章节通过标准流程和技术细节的讲解,提供了透明度保持的有效编码技巧和案例分析。高级技术部分则着重于性能优化、浏览器兼容性问题以及Ca
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )